Кафедра автоматизированного электропривода
Курсовой проект
по дисциплине « Программируемые контроллеры »
Микропроцессорное управление электроприводом
Задание на курсовой проект
Микропроцессорное управление электроприводом
Исходные данные: Микроконтроллер КР1816ВЕ31;
Используемая микросхема ОЗУ К155РУ7 на 1 кбайт;
Используемая микросхема ПЗУ К573РФ2 на 2 кбайт;
Число пусковых ступеней 2;
Время работы на первой ступени 2с.;
Время работы на второй ступени 4с.;
Вид электрического торможения – противовключение;
Используемый двигатель – ДПТ НВ;
Время торможения 5с.;
Напряжение катушки контактора ;
Ток катушки контактора .
Разработать: Программируемый контроллер для управления электроприводом на базе микроконтроллера КР1816ВЕ31;
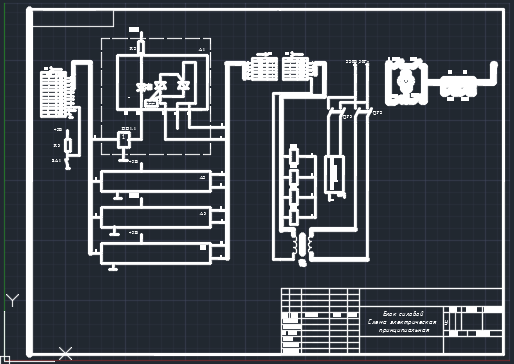
Схему силовой цепи и управления ДПТ НВ обеспечивающую пуск, работу и торможение двигателя;
Пуск и останов двигателя осуществлять тумблером, включенным в канал порта Р3 микроконтроллера;
Управление контакторами двигателя осуществлять от канала порта Р1 микроконтроллера;
Создать гальваническую развязку между электрическими цепями управления двигателем и микропроцессорной системой;
В качестве электронного ключа коммутации обмотки контактора использовать транзистор;
Сделать описание работы блока силовых устройств и управления двигателем;
Аннотация
Пояснительная записка содержит страниц, приложения. Графическая часть выполнена на листах формата А4 (приложения А и Б).
В данном проекте разрабатывается микропроцессорная система - программируемый контроллер, позволяющая управлять двигателем постоянного тока параллельного возбуждения по заданному алгоритму.
Пояснительная записка содержит состав и описание работы всех основных блоков микропроцессорной системы.
Содержание
Введение …………………………………………………………………………..
1 Проектирование аппаратной части программируемого контроллера ………
1.1 Микроконтроллер КР1816ВЕ31.………………………………………….….
1.1.1 Назначение программируемого контроллера ……………………...….….
1.1.2 Технические параметры микроконтроллера …… ………………..…..….
1.1.3 Схема выводов микроконтроллера ……………………………….......……
1.1.4 Таблица выводов микроконтроллера ………………………………....…..
1.1.5 Подключение кварцевого резонатора……………………………………..
1.1.6 Основные возможности микроконтроллера………………………………
1.2 Узел памяти программируемого контроллера ………………………..….....
1.2.1 Внешняя память данных….………………………………………….…….
1.2.2 Внешняя память программ …………………………………………….….
1.2.3 Формирование карт распределения памяти ..………………………....…..
1.3 Выбор оптоэлектронного реле ………………………………………………
2 Проектирование программного обеспечения ………………………..……….
2.1 Формирование временной задержки с использованием таймера ….…..…
2.2 Блок – схема алгоритма управления двигателем …………………………..
2.3 Программа управления двигателем …………………………………………
Заключение …………………………………………………………………..……
Список использованных источников ……………………………………..……..
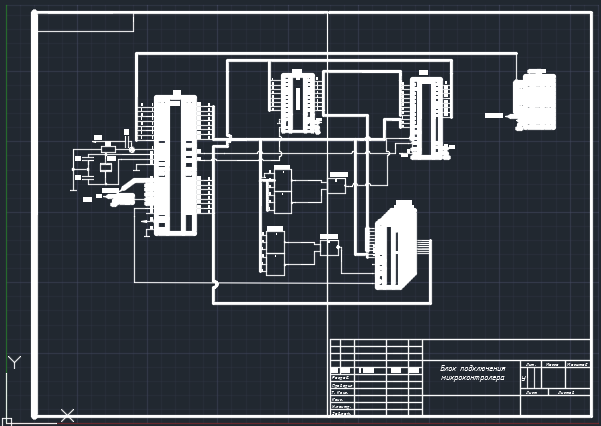
Приложение А (обязательное) – Принципиальная электрическая схема ПК
Приложение Б (обязательное) – Силовая схема, гальв.разв., электр.ключ
Введение
Современные системы управления электроприводов нельзя представить без микроконтроллеров. Микроконтроллеры еще можно назвать однокристальные ЭВМ. Это более совершенное устройство для управления приводами, по сравнению с контроллерами, так как существует ряд преимуществ. Первое преимущество – компактность, то есть микроконтроллер это БИС, которая уже включает в себя и процессорный узел и периферийные устройства. Второе преимущество – малая потребляемая мощность. Третье преимущество – более высокая надежность по сравнению с контроллерами, за счет отсутствия паяных соединений.
Современное технологическое оборудование, вне зависимости оснащено электроприводом или нет, требует контроля за параметрами, их обработки и выработки управляющих сигналов. По сравнению с системами управления на жесткой логике, управление с помощью микроконтроллеров имеет следующие преимущества. Первое – возможность изменения программы. Второе – значительно меньшие габариты. Третье – более высокая мобильность.
Рынок микроконтроллеров представлен большим разнообразием модификаций, в зависимости от фирм производителей. Особенно распространен контроллер МК51, который является, по сути, микроконтроллером фирмы Intel – Intel 8051. На сегодняшний день существует более 200 модификаций микроконтроллеров, совместимых с i8051, выпускаемых двумя десятками компаний, и большое количество микроконтроллеров других типов. Популярностью у разработчиков пользуются 8-битные микроконтроллеры PIC фирмы Microchip Technology и AVR фирмы Atmel, 16-битные MSP430 фирмы TI, а также ARM, архитектуру которых разрабатывает фирма ARM и продаёт лицензии другим фирмам для их производства.
1 Проектирование аппаратной части программируемого контроллера
1.1 Микроконтроллер КР1816ВЕ31
1.1.1 Назначение микроконтроллера
Восьмиразрядные высокопроизводительные однокристальные микроЭВМ (ОМЭВМ) семейства МК51 выполнены по высококачественной n-МОП технологии (серия 1816) и КМОП технологии (серия 1830).
Использование ОМЭВМ семейства МК51 по сравнению с МК48 обеспечивает увеличение объема памяти команд и памяти данных. Новые возможности ввода-вывода и периферийных устройств расширяют диапазон применения и снижают общие затраты системы. В зависимости от условий использования, быстродействие системы увеличивается минимум в два с половиной раза и максимум в десять раз.
Семейство МК51 включает пять модификаций ОМЭВМ (имеющих идентичные основные характеристики), основное различие между которыми состоит в реализации памяти программ и мощности потребления.
ОМЭВМ КР1816ВЕ31 и КР1830ВЕ31 не содержат встроенной памяти программ, однако могут использовать до 64 Кбайт внешней постоянной или перепрограммируемой памяти программ и эффективно использоваться в системах, требующих большего по объему ПЗУ памяти программ.
ОМЭВМ содержат все узлы, необходимые для автономной работы:
- центральный восьмиразрядный процессор;
- память данных объёмом 128 байт;
- четыре восьмиразрядных программируемых канала ввода – вывода;
- два 16 – битовых многорежимных таймера/счётчика;
- систему прерывания с пятью векторами и двумя уровнями;
- последовательный интерфейс;
- тактовый генератор.
1.1.2 Технические параметры микроконтроллера
Технические параметры микроконтроллера указаны в таблице 1.1
Таблица 1.1
Микросхема |
Аналог INTEL |
Объем внутренней памяти программ, байт |
Тип памяти программ |
Объем внутренней памяти данных, байт |
Максимальная частота тактовых импульсов, МГц |
Ток потребления, мА |
|
КР1816ВЕ3 |
8031АН |
- |
внешняя |
128 |
12 |
150 |
Система команд ОМЭВМ содержит 111 базовых команд с форматом 1,2 или 3 байта.
ОМЭВМ имеет:
- 32 РОН;
- 128 определяемых пользователем программно – управляемых флагов;
- набор регистров специальных функций.
РОН и определяемые пользователем программно – управляемые флаги расположены в адресном пространстве внутреннего ОЗУ данных. Регистры специальных функций (SFR, SPECIAL FUNCTION REGISTERS) с указанием их адресов приведены в таблице 1.2
Таблица 1.2
|
Обозначение |
Наименование |
Адрес |
|
ACC |
Аккумулятор |
0Е0Н |
|
B |
Регистр В |
0F0H |
|
PSW |
Регистр состояния программы |
0D0H |
|
SP |
Указатель стека |
81H |
|
DPTR DPL DPH |
Указатель данных. 2 байта: Младший байт Старший байт |
82Н 83Н |
|
P0 |
Порт 0 |
80Н |
|
P1 |
Порт 1 |
90Н |
|
P2 |
Порт 2 |
0А0Н |
|
P3 |
Порт 3 |
0В0Н |
|
IP |
Регистр приоритетов прерывания |
0В8Н |
|
IE |
Регистр разрешения прерываний |
0А8Н |
|
TMOD |
Регистр режимов таймера/счётчика |
89Н |
|
TCON |
Регистр управления таймера/счётчика |
88Н |
|
TH0 |
Таймер/счётчик 0. Старший байт |
8СН |
|
TL0 |
Таймер/счётчик 0. Младший байт |
8АН |
|
TH1 |
Таймер/счётчик 1. Старший байт |
8DН |
|
TL1 |
Таймер/счётчик 1. Младший байт |
8BН |
|
SCON |
Управление последовательным портом |
98Н |
|
SBUF |
Буфер последовательного порта |
99Н |
|
PCON |
Управление потреблением |
87Н |
1.1.3 Схема выводов микроконтроллера КР1816ВЕ3
Рисунок 1.1 – Схема выводов микроконтроллера КР1816ВЕ3
1.1.4 Таблица выводов микроконтроллера
Таблица 1.3
|
N вывода |
Обозначение |
Назначение |
Тип |
|
1-8 |
Р1.0-Р1.7 |
8-разрядный двунаправленный порт Р1 . Вход адреса А0-А7 при проверке внутреннего ПЗУ (РПЗУ).
|
вход/ выход |
|
9 |
RST |
Сигнал общего сброса. Вывод резервного питания ОЗУ от внешнего источника (для 1816)
|
вход |
|
10-17 |
РЗ . 0-РЗ . 7 |
8-разрядный двунаправленный порт РЗ с дополнительными функциями:
|
вход/ выход |
|
|
Р3.0 |
Последовательные данные приемника - RxD
|
вход |
|
|
Р3.1 |
Последовательные данные передатчика - TxD
|
выход |
|
|
Р3.2 |
Вход внешнего прерывания 0- INT0
|
вход |
|
|
РЗ.З |
Вход внешнего прерывания 1- INT1
|
вход |
|
|
Р3.4 |
Вход таймера/счетчика 0: - Т0
|
вход |
|
|
Р3.5 |
Вход таймера/счетчика 1 : - Т1
|
вход |
|
|
Р3.6 |
Выход стробирующего сигнала при
|
выход |
|
|
|
записи во внешнюю память данных: - WR
|
|
|
|
Р3.7 |
Выход стробирующего сигнала при чтении из внешней памяти данных - RD
|
выход |
|
18 -19
|
BQ2, BQ1 |
Выводы для подключения кварцевого резонатора.
|
выход вход |
|
20
|
0 В |
Общий вывод
|
|
|
21-28 |
Р2.0-Р2.7 |
8-разрядный двунаправленный порт Р2. Выход адреса А8-А15 в режиме работы с внешней памятью. В режиме проверки внутреннего ПЗУ выводы Р2.0 - Р2.6 используются как вход адреса А8-А14. Вывод Р2.7 - разрешение чтения ПЗУ: - Е
|
вход/ выход |
|
29 |
РМЕ |
Разрешение программной памяти |
выход |
|
30 |
ALE |
Выходной сигнал разрешения фиксации адреса. При программировании РПЗУ сигнал: - PROG |
вход/ выход |
|
31 |
DEMA |
Блокировка работы с внутренней памятью. При программировании РПЗУ подается сигнал UPR |
вход/ выход |
|
32-39 |
Р0.7-Р0.0 |
8-разрядный двунаправленный порт Р0 . Шина адреса /данных при работе с внешней памятью. Выход данных D7-D0 в режиме проверки внутреннего ПЗУ (РПЗУ) |
вход/ выход |
|
40 |
Ucc |
Вывод питания от источника напряжения +5 В |
|
1.1.5 Подключение кварцевого резонатора и организация системного сброса микроконтроллера
Подключение кварцевого резонатора и организация системного сброса микроконтроллера КР1816ВЕ3 показана на рисунке 1.2
Рисунок 1.2 – Схема подключения кварцевого резонатора и организация системного сброса
Чтобы при включении питания сброс был гарантировано выполнен, вывод RST должен удерживаться в состоянии высокого уровня в течении времени, достаточного для запуска тактового генератора плюс еще минимум два машинных цикла. Время запуска тактового генератора зависит от его частоты работы и для 10 МГц кварцевого резонатора составляет в среднем 1 мс.
1.1.6 Основные возможности микроконтроллера.
ОМЭВМ содержат все узлы, необходимые для автономной работы:
1) центральный восьмиразрядный процессор;
2) память данных объемом 128 байт;
3) четыре восьмиразрядных программируемых канала ввода-вывода;
4) два 16-битовых многорежимных таймера/счетчика;
5) систему прерываний с пятью векторами и двумя уровнями;
6) последовательный интерфейс;
7) тактовый генератор.
ОМЭВМ также имеет:
— 32 РОН;
— 128 определяемых пользователем программно-управляемых флагов;
— набор регистров специальных функций.
1.2 Узел памяти программируемого контроллера
1.2.1 Внешняя память программ
ОЗУ – оперативное запоминающее устройство, является энергозависимой памятью.
Внешнее ОЗУ предназначено для выполнения промежуточных операций, записи и считывания промежуточных переменных (программ) и т.д.
ОЗУ формируется на базе микросхемы К155РУ7. Совместимость по входу и выходу с TTL – схемами. Информационная емкость 1024 бит. Условное графическое обозначение микросхемы показано на рисунке 1.3, таблица истинности приведена в таблице 1.4. Таблица обозначения выводов микросхемы представлена в таблице 1.5.
Рисунок 1.3 – Условное графическое обозначение микросхемы К155РУ7
Таблица 1.4 – Таблица истинности
|
Адрес |
DI |
DO |
Состояние |
||
|
X |
X |
1 |
Roff |
X |
Хранение |
|
A |
0 |
0 |
Roff |
0 |
Запись 0 |
|
A |
1 |
0 |
Roff |
0 |
Запись 1 |
|
A |
X |
0 |
Пр.Код |
1 |
Считывание |
Таблица 1.5 – Таблица обозначения выводов микросхемы
|
Выводы |
Назначение |
Обозначение |
|
2…6, 9…13 |
Адресные входы |
А0...А4, А5…А9 |
|
15 |
Вход данных |
DI |
|
7 |
Выход данных |
DO |
|
1 |
Выбор микросхемы |
|
|
14 |
Сигнал запись/считывание |
|
|
16 |
Напряжение питания |
Ucc |
|
8 |
Общий |
0В |
1.2.2 Внешняя память программ
ПЗУ – постоянное запоминающее устройство, является энергонезависимой памятью и используется для хранения и считывания программ, определяющих работу всех элементов системы.
ПЗУ формируется на базе микросхемы К573РФ2. Условное графическое обозначение представлено на рисунке 1.4, технические данные микросхемы приведены в таблице 1.6, назначения выводов показано в таблице 1.7. Таблица истинности и режимы работы данной микросхемы приведены в таблице 1.8. К573Ф – обеспечивают электрическую запись информации и стирание информации ультрафиолетовым светом; выполнено по n-МОП технологии с «плавающим» затвором.
Адресация к тому или иному блоку микросхем производится с помощью сигнала выбора микросхем СS. Информационная емкость 16384 бит. Для получения 2 кб ПЗУ, применяем одну микросхему.
Рисунок 1.4 – Условное графическое обозначение микросхемы К573РФ2
Таблица 1.6 – Основные технические данные МС К573РФ2
|
Время выборки адреса |
Не более 450 нс |
|
Время хранения информации: при включенных источниках питания при выключенных источниках питания |
Не менее 25000 ч Не менее 25000 ч |
|
Число циклов программирования |
Не менее 100 |
|
Напряжение питания |
Ucc1 = 5В ± 5% UPR = 5B ± 5% |
|
Суммарная потребляемая мощность: в режиме считывания в режиме хранения |
Не более 580 мВт Не более 200 мВт |
|
Диапазон температур |
-45…+70°С |
|
Выход |
Три состояния |
|
Совместимость по входу и выходу |
С ТТЛ схемами |
|
Тип корпуса |
Металлокерамический,21ОБ.24-5, с прозрачной для UV-лучей крышкой |
Таблица 1.7 – Таблица обозначения выводов микросхемы
|
Выводы |
Назначение |
Обозначение |
|
1…8, 19, 22, 23 |
Адресные входы |
А7...А0, А10, А9, А8 |
|
9,10,11, 13…17 |
Вход-выход данных |
DI0…DIO7 |
|
18 |
Выбор микросхемы |
|
|
20 |
Разрешение по выходу |
|
|
24 |
Напряжение питание |
Ucc |
|
21 |
Напряжение программирования |
UPR |
|
12 |
Общий |
0В |
Таблица 1.8 – Таблица истинности
|
Адрес |
UPR |
DIО0.. DIО1 |
состояние |
||
|
Х |
1 |
Х |
Ucc |
Roff |
Хранение |
|
А |
1 |
1 |
+25 В |
Входные данные в прямом коде |
Программирование |
|
А |
0 |
0 |
+25 В |
Входные данные в прямом коде |
Контроль после программирования |
|
А |
0 |
0 |
Ucc |
Входные данные в прямом коде |
Считывание |
1.2.3 Формирование карт распределения памяти.
С учетом емкости каждой микросхемы и общего объема памяти ПЗУ и ОЗУ составлены карта распределения памяти. Карта распределения резидентной памяти данных приведена в таблице 1.8. Карта распределения внешней памяти ПЗУ и ОЗУ приведена в таблицах 1.9 и 1.10 соответственно.
Таблица 1.9
|
А7 |
А6 |
А5 |
А4 |
А3 |
А2 |
А1 |
А0 |
16-рич. |
Область памяти |
|
0
0 |
0
0 |
0
0 |
0
1 |
0
1 |
0
1 |
0
1 |
0
1 |
00
1F |
РОН банков 0…3 |
|
0
0 |
0
0 |
1
1 |
0
0 |
0
1 |
0
1 |
0
1 |
0
1 |
20 2F |
Область побитовой адресации |
|
0
0 |
0
1 |
1
1 |
1
1 |
0
1 |
0
1 |
0
1 |
0
1 |
30
7F |
Область адресации по номеру ячейки |
|
1
1 |
0
0 |
0
0 |
0
0 |
0
0 |
0
0 |
0
1 |
0
1 |
80
83 |
Область регистров специальных функций |
|
1
1 |
0
0 |
0
0 |
0
0 |
0
1 |
1
1 |
1
0 |
1
1 |
87
8D |
|
|
1 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
90 |
|
|
1
1 |
0
0 |
0
0 |
1
1 |
1
1 |
0
0 |
0
0 |
0
1 |
98
99 |
|
|
1 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
A0 |
|
|
1 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
A8 |
|
|
1 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
B0 |
|
|
1 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
B8 |
|
|
1 |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
D0 |
|
|
1 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
E0 |
|
|
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
F0 |
Таблица 1.10
|
Порт Р1 |
Порт Р0 |
|
||||||||||||||||
|
DS |
RAM |
|
||||||||||||||||
|
А15 |
А14 |
А13 |
А12 |
А11 |
А10 |
А9 |
А8 |
А7 |
А6 |
А5 |
А4 |
А3 |
А2 |
А1 |
А0 |
16-рич. |
Примечание |
|
|
0 … 0 |
0 … 0 |
0 … 0 |
0 … 0 |
0 … 0 |
0 … 0 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0000 … 03FF |
DD4-DD11
|
|
Таблица 1.11
|
Порт Р1 |
Порт Р0 |
|
||||||||||||||||
|
DS |
RAM |
|
||||||||||||||||
|
А15 |
А14 |
А13 |
А12 |
А11 |
А10 |
А9 |
А8 |
А7 |
А6 |
А5 |
А4 |
А3 |
А2 |
А1 |
А0 |
16-рич. |
Примечание |
|
|
0 … 0 |
0 … 0 |
0 … 0 |
0 … 0 |
0 … 0 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0 … 1 |
0000 … 07FF |
DD3
|
|
1.3 Выбор оптоэлектронного реле
Для управления катушками магнитных пускателей асинхронного двига-теля необходимо подобрать реле, согласующее ТТЛ-уровень напряжений микропроцесссорной системы с силовой цепью напряжением 70В.
Условия выбора реле:
;
.
По каталогу ЗАО «Протон» / / выбираем оптронное реле К293КП13П
А;
.
Технические характеристики реле К293КП13П приведены в таблице 1.12
Таблица 1.2 - Технические характеристики реле К293КП13П
|
Тип |
Напряжение коммутации |
Ток коммутации |
Напряжение изоляции |
Тип корпуса |
Входной ток |
|||
|
Umax, В |
Umin, В |
Imax, А |
Iном, А |
Imin, А |
В |
- |
мА |
|
|
К293КП13П |
260 |
5 |
1,5 |
1,4 |
1 |
4000 |
SIP12 |
10 |
Рисунок 1.5 – Условное графическое обозначение К293КП13П
2 Проектирование программного обеспечения
2.1 Формирование временной задержки с использованием таймера
В микроконтроллере имеется два таймера/счетчика. Будем использовать таймер/счетчик Т/С0. Т/С1 использовать не будем. Также будем использовать внешний генератор частотой 1 кГц, который подключаем к ТО (P3.4).
Для управления таймерами/счетчиками используются два регистра TCON и TMOD.
Заполним формат регистра режимов таймеров/счетчиков TMOD (см. таблица 2.1).
Таблица 2.1
|
Т/С1 |
Т/С0 |
HEX |
||||||
|
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
|
GATE0 |
С/Т1 |
М1 |
М0 |
GATE0 |
С/Т0 |
М1 |
М0 |
|
|
0 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
=15Н |
Используем режим работы счетчиков 1, т.е. оба байта объединены в единое 16 – ти разрядное слово.
Код организации работы регистра управления TCON.
Биты с 0 … 3 не используем, так как они связаны по входу INT. Остальные биты:
TR1 – определяем программно как «0», т.е. Т/С1 не используем;
TR0 – определяем программно как «1», т.е. включить Т/С0 («0» - выключить Т/С0);
TF0 – флаг переполнения Т/С0 используем как бит дающий информацию о завершении отработки временного интервала таймером. Он устанавливается аппаратно: TF0 устанавливается в «0» при переполнении таймера/счетчика, т.е. при достижении уставки времени. Его значение надо использовать командой условного перехода для дальнейшей организации работы программы.
Определим величину чисел, загружаемого в счетчик таймера для организации временной задержки. Так как частота внешнего генератора 1 кГц, следовательно нужно загрузить число:
fт·t = 1000·2 = 200010 = 111 1101 00002 = 7D016;
fт·t = 1000·4 = 400010 = 1111 1010 00002 = FA016;
Программу временной задержки на 2с представлена в таблице 2.2
Таблица 2.2 – Программа временной задержки
|
Мнемоника |
Примечание |
|
MОV TR1, 00H |
Запрещение работы счетчика Т/С1 |
|
MОV TMOD, 15H |
Загрузка регистра специальных функций TMOD значением 15Н |
|
MОV TL0, D0H |
Загрузка таймера/счетчика Т/С0 |
|
MОV TН0, 07H |
|
|
MОV TR0, 01H |
Запуск счетчика Т/С0 |
|
М1: |
Определение момента завершения отсчета временного интервала |
|
JB TF0, M1 |
|
|
MОV TR0, 00H |
Выключение счетчика Т/С0 |
2.2 Блок – схема алгоритма управления двигателем
Блок – схема алгоритма управления двигателем показана на рисунке 2.1
Рисунок 2.1 - блок – схема алгоритма управления двигателем.
2.3 Программа управления двигателем
На основе силовой схемы электропривода и особенностей подключения контакторов (см. рисунок 2.2) составим управляющие коды для основной программы.
Рисунок 2.2 - силовая схема электропривода и подключение контакторов.
|
0 |
0 |
0 |
0 |
|
|
|
|
Рисунок 2.3- распределение разрядов порта Р1 по обмоткам контактора
Управляющие коды
|
Пуск |
00000001 |
01Н |
|
Убрать R1 |
00000011 |
03H |
|
Убрать R2 |
00000111 |
07H |
|
ТПВ ДПТ с НВ |
00001000 |
08H |
|
Разборка схемы |
00000000 |
00Н |
Программа управления асинхронным двигателем приведена в таблице 2.3
Таблица 2.3
|
Мнемоника |
Примечание |
|
MОV TMOD, 15H |
Загрузка регистра специальных функций TMOD значением 15Н |
|
MОV TR1, 00H |
Запрещение работы счетчика Т/С1 |
|
М1: |
|
|
JNB Р3.0, M1 |
Переход по нулевому биту на метку М1 (тумблер отключен) |
|
MОV Р1, 01H |
Включение контактора КМ1 |
|
MОV TL0, D0H |
Загрузка таймера/счетчика Т/С0 на 2с |
|
MОV TН0, 07H |
|
|
MОV TR0, 01H |
Запуск счетчика Т/С0 |
|
М2: |
Определение момента завершения отсчета временного интервала |
|
JB TF0, M2 |
|
|
MОV TR0, 00H |
Выключение счетчика Т/С0 |
|
MОV Р1, 03H |
Включение контактора КМ2 (КМ1 включен). Вывод 1 ступени |
|
MОV TL0, А0H |
Загрузка таймера/счетчика Т/С0 на 4с |
|
MОV TН0, 0FH |
|
|
MОV TR0, 01H |
Запуск счетчика Т/С0 |
|
М3: |
Определение момента завершения отсчета временного интервала |
|
JB TF0, M3 |
|
|
MОV TR0, 00H |
Выключение счетчика Т/С0 |
|
MОV Р1, 07H |
Включение контактора КМ3 (КМ1,КМ2 включены). Вывод 2 ступени. Работа на естественной характеристике. |
|
М4:
|
Переход на метку М4 если Р3.0 = 1 (тумблер включен), иначе торможение двигателя |
|
JB Р3.0, M4 |
|
|
MОV Р1, 08H |
Включение контактора КМ4 (КМ1…КМ3 отключены). Торможение противовключением ДПТ с НВ. |
|
MОV TL0, 88H |
Загрузка таймера/счетчика Т/С0 на 5с |
|
MОV TН0, 13H |
|
|
MОV TR0, 01H |
Запуск счетчика Т/С0 |
|
М5: |
Определение момента завершения отсчета временного интервала |
|
JB TF0, M4 |
|
|
MОV TR0, 00H |
Выключение счетчика Т/С0 |
|
MОV Р1, 00H |
Разборка схемы |
|
AJMP М1 |
Безусловный переход на метку М1 (опрос тумблера) |
Заключение
В данном курсовом проекте была разработана микропроцессорная система на базе микроконтроллера КР1816ВЕ31, выполненного по n-МОП – технологии. Данная система позволяет осуществить пуск двигателя в две ступени по принципу времени, если тумблер включен, и торможение противоключением, если тумблер отключен. Используемая мною внешнее ПЗУ позволяет репрограммировать микроконтроллер КР1816ВЕ31, следовательно, можно менять алгоритмы пуска и торможения двигателя.
Список использованных источников
1 Полупроводниковые приборы: Транзисторы. Справочник / В.А. Аронов, А.В. Баюков, А.а. Зайцев и др. Под общ. ред. Н.Н. Горюнова. – М.: Э Галкин В. И. и другие. Полупроводниковые приборы: Транзисторы широкого применения: Справочник – Мн: Беларусь, 1995 – нергоатомиздат, 1982. – 904с.
2 Иванов В.И и др. Полупроводниковые оптоэлектронные приборы: Справочник / В.И. Иванов, А.И. Аксенов, А.М Юшин. – 2-е изд., перераб. и доп. – М.: Энергоатомиздат, 1989. – 448с.
3 Полупроводниковые приборы: Диоды, тиристоры, оптоэлектронные приборы: Справочник / А.В. Баюков, А.Б. Гитцевич, А.А. Зайцев и др.; Под общ. ред. Н.Н. Горюнова. – М.: Энергоатомиздат, 1982 – 744с.
4 Андреев Д.В. Программирование микроконтроллеров MCS-51: Учебное пособие. – Ульяновск: УлГТУ, 2000. – 88 с.
5 Хрипко В.Л. Микроконтроллеры (однокристальные микроЭВМ) семейства МК51. Методические материалы к курсу лекций для студентов заочной формы обучения специальности 140604 – Электропривод и автоматика промышленных установок и технологических комплексов. Оренбург, ГОУ ОГУ. 2005.
6 Боборыкин А.В., Липовецкий Г.П. и др. Однокристальные ЭВМ. – М.: Бином, 1994. – 400 с.
ЧЕРТЕЖИ
Скачать: