Регулятор может быть расположен или в месте измерения параметра, или в ЦПУ. Из-за того что при дистанционном управлении работой механизмов и систем сигнал должен быть передан быстро и без искажений, в систему регулирования включаются различные преобразователи. Задача регулятора заключается в том, чтобы независимо от изменения нагрузки поддерживалось заданное значение параметра. Если с помощью системы регулирования при изменении нагрузки поддерживается заданное значение параметра с нулевой статической ошибкой, то такая система считается астатической. Если каждому значению нагрузки в пределах заданной статической ошибки соответствует свое значение регулируемого параметра, то такая система является статической. Регулятор, в котором используются все три вида регулирующего воздействия, называется трехимпульсным регулятором.
На рис. 15.32 показана схема пневматического трехимпульсного регулятора. Различное сочетание регулирующих воздействий будет определять закон перемещения заслонки и изменение давления на выходе. Если при дифференциальном воздействии регулирующий клапан открывается, а при интегральном воздействии закрывается, что достигается изменением проходных сечений соответствующих регулирующих клапанов, то останется только пропорциональное регулирующее воздействие. Как видно из схемы, если пропорционально изменению регулируемого параметра с помощью измерителя будет перемещена заслонка к соплу, то соответственно увеличится и значение рвых, что определит начало выбега регулирующего органа по закону пропорционального воздействия. При увеличении рвых увеличится давление в сильфоне
интегральной обратной связи, что вызовет обратное смещение заслонки от сопла, уменьшение Рвых и скорости перемещения регулирующего органа. Начало работы сильфона отрицательной интегральной обратной связи будет определять составляющую пропорционального выбега регулирующего органа, и дальнейшее перемещение регулирующего органа продолжается по закону интегрального регулирования.
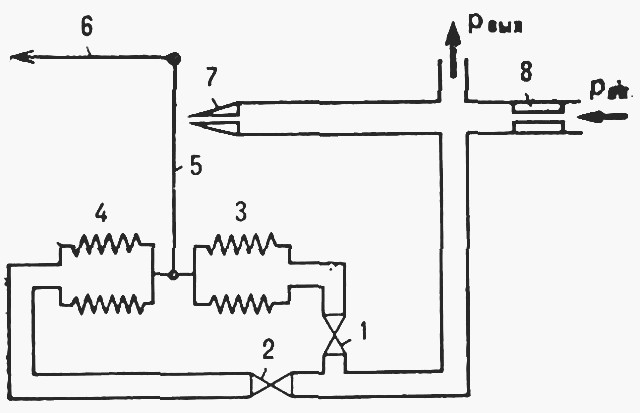
Рис. 15.32. Пневматический ПИД-регулятор:
1 — клапан изменения степени интегрального воздействия; 2—клапан изменения степени дифференциального воздействия; 3— сильфон интегрального воздействия; 4 — сильфон дифференциального воздействия; 5 —заслонка; 6 — к измерителю; 7 — сопло; 8 — дроссель
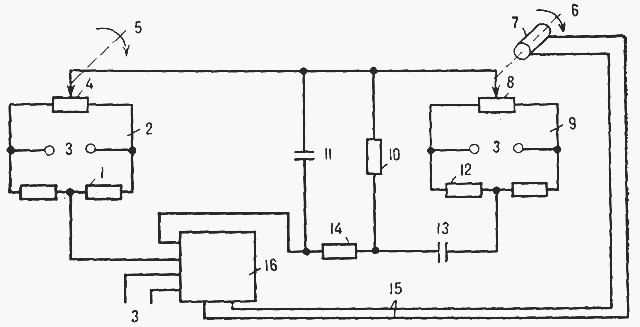
Рис. 15.33. Электронный ПИД-регулятор:
1 — резисторы регулирующего моста; 2— регулирующий мост; 3— питание переменным током; 4 — входной потенциометр; 5 — поступление входного сигнала от измерителя; 6 — привод к регулирующему органу; 7 — электродвигатель; 8 — выходной потенциометр; 9 — уравновешивающий мост; 10 — резистор интегральной связи R: 11 — конденсатор дифференциальной связи; 12 — резистор уравновешивающего моста. 13 — конденсатор интегральной связи; 14 — резистор дифференциальной связи R: 15 — выходной сигнал; 16 — усилитель
Степень дифференциального регулирующего воздействия определяется изменением проходного сечения регулирующего клапана. Например, если клапан изменения степени дифференциального воздействия открыть, то степень этого воздействия будет увеличиваться и даже при небольшом изменении регулируемого параметра можно получить большие по значению изменения рвых, так как связь оказывает дополнительное воздействие на заслонку в сторону действия измерителя.
Электронный трехимпульсный регулятор показан на рис. 15.33. Регулирование выходного сигнала производится в результате суммирующего воздействия трех импульсов. При любом изменении регулируемого параметра происходит изменение положения движка входного потенциометра и изменение напряжения на входе в усилитель, т. е. нарушается равновесие мостовой схемы, в результате чего происходит поворот ротора выходного управляющего электродвигателя и движка выходного потенциометра. Равновесие мостовой схемы будет восстановлено тогда, когда произойдет выравнивание напряжений на входе в усилитель двух плеч мостовой схемы. В этом случае сигнал на выходе из усилителя будет равен нулю.
Смещение движка выходного потенциометра будет продолжаться до тех пор, пока имеется отклонение от заданного значения. Но, через определенный постоянный промежуток времени после начала выбега по пропорциональному закону регулирования появится ток в цепи делителя R и конденсаторе интегральной обратной связи — начнется воздействие на регулируемый параметр по интегральному закону регулирования и, как указывалось выше, передвижение движка выходного потенциометра будет продолжаться до тех пор, пока имеется рассогласование напряжений двух плеч мостовой схемы. Выбег по интегральному и дифференциаль-
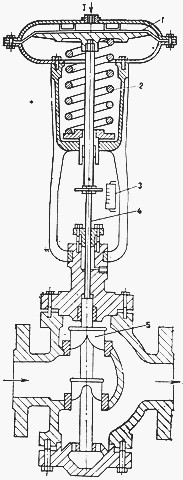
Рис. 15.34. Пневматический регулирующий клапан:
1 — мембрана; 2 — цилиндрическая пружина; 3 — указатель положения клапана; 4— клапанный шток; 5— двухседельчатый клапан; I — вход сжатого воздуха
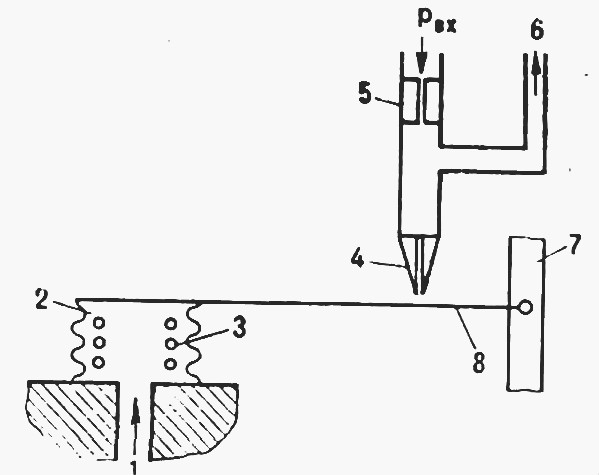
Рис. 15.35. Клапанный позиционер:
1 — сигнал от регулятора; 2— сильфон; 3— пружина; 4 — сопло; 5 — дроссель; 6 — трубопровод к мембране регулирующего клапана; 7 — шток; 8— заслонка
ному воздействиям будет определяться постоянными времени, образованными делителями R и конденсаторами, входящими в соответствующие цепи. Регулирование будет осуществляться со статической ошибкой, если регулятор оказывает только пропорциональное регулирующее воздействие. Дифференциальное регулирующее воздействие появится тогда, когда появится ток в цепи делителя и конденсаторе дифференциального воздействия. С помощью электродвигателя выходного потенциометра одновременно производится переме
щение регулирующего клапана или другого исполнительного органа.
Регулирующий орган. Выходной сигнал регулятора поступает к регулирующему органу, с помощью которого система работает на новом установившемся режиме при заданном значении параметра. Таким регулирующим органом может быть клапан, электродвигатель, заслонка или жалюзи для вентилятора, электриче-
ский контактор. В судовых системах для перераспределения потоков применяются клапанные или золотниковые трехходовые регулирующие органы — смесители.
Пневматический регулирующий клапан. Наиболее распространенная конструкция пневматического клапана показана на рис. 15.34. Клапан состоит из двух частей — пневматического усилителя и двухседельчатого клапана разгруженного типа. В конструкцию усилителя входит мембрана с жестким центром, благодаря чему увеличивается мощность сигнала, подающегося на клапан. Смещение диафрагмы приводит к перемещению клапанного штока и клапана.
Движению диафрагмы противодействует сила сжатия пружины из-за чего смещение клапана ограничивается при изменении выходного сигнала регулятора. При изменении выходного сигнала регулятора от минимального до максимального значения клапан сместится на длину полного хода.
Клапан данного типа устанавливается на соответствующем трубопроводе и обычно применяется в системах прямого действия. При увеличении давления воздуха клапан закрывается, а при уменьшении давления открывается. Движению диафрагмы противодействует сила сжатия пружины, с помощью которой клапан открывается или закрывается в зависимости от изменения давления воздуха, действующего на диафрагму.
Клапан может быть односедельчатым или двухседельчатым и иметь различное конструктивное исполнение. Двухседельчатые клапаны сложнее по конструкции, однако не имеют тех недостатков, которые присущи односедельчатым клапанам (односторонняя нагрузка), поэтому односедельчатые клапаны широко применяют для больших проходных сечений и больших перепадов давлений. Клапанные регулирующие органы работают по принципу дросселирования потока.
Если для перемещения клапана из-за наличия значительных сил трения и односторонней нагрузки необходимо прилагать большие усилия, то применяется клапанный позиционер (клапанный усилитель с жесткой обратной связью). Схема клапанного позиционера показана на рис. 15.35. Сигнал от регулятора поступает к сильфону измерителя позиционера, с помощью которого изменяется положение заслонки относительно сопла. При этом изменяется давление воздуха, поступающего к диафрагме регулирующего органа. Сжатый воздух подводится к позиционеру через дроссель постоянного сечения, который ограничивает максимальный выход воздуха в атмосферу. При смещении диафрагмы изменяется положение регулирующего органа и смещаются заслонки при движении клапанного штока в сторону, обратную действию измерителя — действие жесткой обратной связи. Благодаря этому обеспечивается пропорциональная зависимость при перемещении клапана от изменения значения сигнала на входе в позиционер.
Усилитель мощности. Сигнал, поступающий от регулятора к исполнительному органу, может быть пневматическим, электрическим или гидравлическим. Поэтому усилители могут быть пневматическими, гидравлическими или электрическими.
Электрические сигналы регуляторов обычно имеют небольшое напряжение или силу тока. Пневматические сигналы также малы по мощности, из-за чего возникает необходимость введения усилителя сигналов. Для этого используются пневматические и гидравлически усилители. Например, если сигнал, поступающий от регулятора, пневматический, то может применяться усилитель, который был рассмотрен в § 15.8.
Гидравлические усилители применяются в тех случаях, когда имеются большие потоки и перепады давлений или если для перемещения регулирующих органов необходимы большие усилия.
Используемая литература: "Основы судовой техники" Автор: Д.А. Тейлор
Скачать реферат:
Пароль на архив: privetstudent.com