Кафедра промышленной электроники и информационной
измерительной техники
ДИПЛОМНЫЙ ПРОЕКТ
Разработка одноплатного контроллера для локальной информационной системы
Пояснительная записка
Аннотация
Пояснительная записка содержит 68 страниц, в том числе 11 рисунков, 12 таблиц, 3 приложения. Графическая часть выполнена на 5 листах формата A1, и на 2 листах формата A2.
В данной дипломной работе изложены основные принципы построения, функционирования и алгоритма работы эмулятора ПЗУ. Особое внимание уделено обеспечению поддержки функций отладки для микроконтроллеров семейства MCS-51.
Диплом содержит расчет экономических показателей, рассмотрены вопросы безопасности труда.
Summary
Explanatory note comprises of 68 pages, including 11 pictures, 12 tables, 3 appendixes. The graphic part are realized on 5 A1 format sheets, and 2 A3 format sheets.
Certificate project explains basic principles of construction, functioning and algorithm of work of the ROM emulator. The special attention is given to maintenance of support of functions of debugging for microcontrollers of family MCS-51.
Project also includes calculation of eсonimic measures, review of labor safety.
Задание
на дипломный проект
Одноплатный контроллер для локальной информационной системы__________________________________________
2 Срок сдачи законченного проекта «____»
3 Исходные данные к проекту
1 Параметры связи с IBM PC:
- протокол обмена данными RS–232;
- скорость приема передачи – 9200 бит/с;
- длина посылки – 8 бит без контрольного разряда.
2 Источник питания: +12 В ±5% .
3 Входные сигналы:
- число аналоговых каналов – 4;
- диапазон входных напряжений – 0 … 2 В;
- входное сопротивление аналоговых каналов – не менее 1 кОм;
- число концевых датчиков или их имитаторов – 8;
- уровни логических сигналов концевых датчиков – ТТЛ.
4 Выходные сигналы:
- число аналоговых каналов – 2;
- диапазон выходных напряжений – 0 … 2 В;
- выходное сопротивление аналоговых каналов – не более 1 кОм;
- число выходных релейных сигналов – 8;
- уровни выходных релейных сигналов – ТТЛ.
4 Содержание пояснительной записки (перечень подлежащих разработке разделов темы)
Введение
РАЗДЕЛ 1. Обзор и анализ контролирующих и информационно-управляющих систем
РАЗДЕЛ 2. Разработка структурной схемы контроллера
РАЗДЕЛ 3. Разработка электрической принципиальной схемы контроллера
РАЗДЕЛ 4. Разработка алгоритма и программы функционирования контроллера
РАЗДЕЛ 5. Экономическая часть проекта
Заключение
5 Перечень графического материала (с точным указанием обязательных чертежей)__________
- Техническое задание
- Структурная схема контроллера
- Электрическая принципиальная схема контроллера
- Система команд управления
- Блок-схема алгоритма функционирования контроллера
- Результаты экономических расчетов
____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
6 Консультанты по проекту (с указанием относящихся к ним разделов проекта)____________
_____________________________________________________________________________________ ___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Дата выдачи задания «____ » ______
Руководитель ____________________________
(подпись)
Задание принял к исполнению «_____ » ________________
_______________________
(подпись дипломника)
Содержание
Аннотация. 3
Summary. 4
Содержание. 5
Введение. 7
1 Обзор и анализ существующих технических решений узлов сопряжения с объектом. 9
1.1 Задачи, решаемые информационно-управляющими системами. 9
1.2 Контроль как важнейшая составляющая ИИС.. 10
1.3 Автоматизированные ИИС.. 11
1.4 Роль ИУС в электронных системах. 14
1.5 Структура и функциональные задачи ИУС.. 15
1.6 Классификация и основные характеристики ИУС.. 16
1.7 Типовая схема и характеристика решаемых задач ИУС.. 18
1.8 Типовая структура ИУС.. 19
1.9 Характеристика решаемых задач ИУС.. 22
1.10 Ввод и предварительная обработка информации в устройстве сопряжения с объектом. 22
1.11 Обработка входной информации в контроллере. 23
1.12 Решение основных функциональных задач и выработка управляющих воздействий в контроллере. 23
1.13 Диагностирование ИУС.. 26
1.14 Вывод управляющих воздействий. 26
1.15 Обмен информацией через ЛВС.. 26
1.16 Формы представления входной информации. 27
1.17 Формы представления выходной воздействий. 28
1.18 Характеристика микропроцессорных ИУС.. 29
1.19 Характеристика микропроцессорных средств ИУС.. 29
1.20Характеристика программного обеспечения. 31
1.21 Структура централизованных микропроцессорных ИУС.. 32
1.22 Структура децентрализованных микропроцессорных ИУС.. 35
2 Разработка структурной схемы. 36
2.1 Типовая схема включения модуля ИУС в систему контроля и управления 37
3 Разработка и расчет схемы принципиальной электрической устройства сопряжения с объектом. 39
3.1 Разработка блока контроллера. 40
3.2 Разработка блока АЦП и ЦАП. 44
3.3 Разработка и расчет блока индикации. 44
3.4 Разработка блока звуковой сигнализации. 45
3.5 Разработка блока стабилизатор напряжения. 46
3.6 Разработка блока преобразователя напряжения. 46
4 Разработка системы команд и алгоритма программы. 47
4.1 Система макрокоманд управления узлом ИУС.. 47
4.2 Разработка подпрограммы постоянного преобразования АЦП1-АЦП4 и опроса их выходов. 48
4.3 Разработка алгоритма подпрограммы обработки прерывания. 50
ПРИЛОЖЕНИЕ А.. 53
Шестнадцатеричный код программы.. 53
Введение
Прогресс в области вычислительной техники и радиоэлектроники связан с достижениями микроэлектроники в создании интегральных схем малой, средней, большой и сверхбольшой степени интеграции. Появление микропроцессорных БИС позволило из-за их дешевизны, малых габаритов, массы, мощности потребления и свойства программируемости функций решить проблему разработки малого числа БИС для большого числа применений, внедрить вычислительную технику в те области, в которых ранее она не использовалась.
Необходимость повышения технического уровня вычислительной техники, приборов и средств автоматизации измерений, контроля и управления, а также связи на основе новейших достижений микроэлектроники является одной из самых актуальных задач.
Мировой промышленностью освоены и выпускаются много типов микропроцессоров, благодаря которым обеспечены исключительные преимущества цифровым методам обработки информации. Однако существуют аналоговые сигналы, которые надо принимать, обрабатывать, хранить и выдавать пользователю.
Важное значение приобретает проблема связи аналоговых объектов с цифровыми управляющими машинами, в частности вопросы преобразований, нормализации сигналов, методы и средства передачи аналоговых сигналов по линиям связи при наличии помех и так далее. Применение микропроцессоров и однокристальных микроконтроллеров для сбора данных и управления технологическими процессами вызывает ряд проблем аналого-цифрового преобразования сигналов, которые должен решать пользователь.
Для обработки аналоговых и цифровых сигналов разработана большая номенклатура микросхем, среди которых можно отметить генераторы, усилители, аналого-цифровые и цифроаналоговые преобразователи, модуляторы, компараторы, переключатели тока и напряжения, элементы выборки и хранения, фильтры, вторичные источники питания, центральные процессорные элементы, устройства управления вводом-выводом, программируемые параллельные и последовательные интерфейсы, контроллеры прямого доступа к памяти, магистральные приемопередатчики, блоки микропрограммного управления, приоритетного прерывания, арифметические расширители, запоминающие устройства, многофункциональные синхронизирующие устройства, программируемые таймеры и тому подобное.
Большинство перечисленных схем и устройств являются функциональными составными частями микропроцессорных комплектов, в значительной степени определяя архитектуру информационных и управляющих систем. Однако практически любой одноплатный контроллер, кроме основных функциональных БИС, содержит и значительное число микросхем малой и средней степени интеграции, особенно в периферийном оборудовании, датчиках первичной информации, устройствах встроенного контроля и диагностики, устройствах отображения информации и так далее.
Получение количественной и качественной информации о функционирования сложных изделий — трудоемкий и длительный процесс, требующий усилий большого числа лиц для получения достоверной информации. Системы измерения и контроля на базе микроконтроллеров обладают большими преимуществами в отношении стоимости измерения и контроля, уменьшения времени его проведения и обработки результатов, надежности, обеспечивают значительную гибкость, высокую компактность и модульную простоту, а также открывают широкие возможности для новых приложений, ранее требовавших использования дорогих специализированных ЭВМ.
В основу решения задачи автоматизированного измерения и контроля параметров технического состояния объектов положены следующие принципы: максимальная степень автоматизации процесса контроля и сведение к минимуму числа ручных операций, повышение достоверности результатов контроля, автоматическая выдача протокола результатов испытаний (диагностики); высокая надежность системы, основанная на использовании встроенного микроконтроллера и модульной структуры; максимальная простота и доступность программного обеспечения, благодаря которым система контроля может обслуживаться лицами, не являющимися специалистами в области вычислительной техники.
1 Обзор и анализ существующих технических решений узлов сопряжения с объектом.
1.1 Задачи, решаемые информационно-управляющими системами
Современные информационно-управляющие системы — крупнейший раздел технической кибернетики — дисциплины, изучающей общие закономерности процессов целесообразного управления, получения и преобразования информации в технических устройствах.
Подавляющую и наиболее важную часть этих систем составляет информационная техника. Она решает огромный круг задач, связанных главным образом со сбором, переработкой, передачей, хранением, поиском и выдачей разнообразной информации человеку.
В соответствии с основными функциями информационной техники выделяются следующие ее ветви:
- информационно-измерительная техника;
- вычислительная техника;
- техника передачи информации (связи);
- техника хранения и поиска информации.
Каждая из этих основных ветвей информационной техники имеет свои особенности, принципы построения технических устройств. В то же время они объединяются общими теоретическими основами.
Тем не менее, интересно и полезно рассмотреть подробнее разделы информационно-измерительной техники (ИИТ), совокупность которых позволяет получать количественно опытным путем определенную информацию о разнообразных объектах материального мира.
Основными процессами, позволяющими получить такую информацию, являются:
- обнаружение событий,
- процесс счета,
- измерение,
- распознавание образов,
- контроль,
- техническая диагностика.
В ИИТ применяется узкое толкование этих терминов, вытекающее из того, что процессы измерения реализуются экспериментально, служат для получения количественной оценки состояния материального объекта.
Счет – это определение количества каких-либо событий или предметов; в ИИТ относительно редко имеет самостоятельное значение и чаще входит составляющей операцией в процессы измерения, контроля и так далее.
Измерение — это нахождение значения физической величины опытным путем с помощью специальных технических средств. В процессе измерения получается численное отношение между измеряемой величиной и некоторым ее значением, принятым за единицу сравнения.
Распознавание образов связано с установлением соответствия между объектом и заданным образом. При опознании образ может быть задан в виде образцового изделия или в виде перечня определенных свойств и значений параметров (признаков) с указанием полей допуска.
Под контролем понимается установление соответствия между состоянием (свойством) объекта контроля и заданной нормой, определяющей качественно различные области его состояния. В результате контроля выдается суждение о состоянии объекта контроля. Нужно заметить, что в целом ряде практических приложений понятия контроля и распознавания образов совпадают.
Во многих случаях для восстановления нормальной работы объекта необходимо выявить элементы, послужившие причиной его неправильного функционирования. Такое направление развития методов и средств контроля работы технических устройств называется технической диагностикой.
1.2 Контроль как важнейшая составляющая ИИС
Во всех перечисленных процессах, используемых в ИИТ, имеются общие черты. Все эти процессы обязательно включают восприятие техническими средствами исследуемых (измеряемых, контролируемых) величин, весьма часто с преобразованием в некоторые промежуточные величины, сравнение их опытным путем с известными величинами, с описаниями состояний или свойств объектов, формирование и выдачу результатов в виде именованных чисел, их отношений, суждений, основанных на количественных соотношениях.
Рассмотрим более пристально понятие контроля, в том числе – автоматизированного, занимающего весьма существенную часть в современных средствах ИИС. Как уже было отмечено, под контролем понимается процесс установления соответствия между состоянием объекта контроля и заданными нормами. В результате контроля выдается суждение о том, к какой из нормированных качественно различающихся областей относится рассматриваемое состояние объекта контроля.
В принципе, при контроле нет необходимости знать значения контролируемых величин. С этой точки зрения контроль является операцией сжатия информации, устранения ненужных в данном случае сведений об объекте контроля.
Контроль может быть осуществлен везде, где имеются установленные нормы. Нормы задаются самым разнообразным образом. Например, в учебном процессе они могут задаваться в виде объема конкретных знаний предусмотренных программой подготовки студентов; в области промышленной электроники – множеством количественных значений, определяющих нормальное состояние электронных средств (ЭС).
В дальнейшем рассматривается лишь контроль, при котором описания норм заданы в количественном виде с помощью аналоговых и цифровых уставок, а результатом контроля является количественно определенное суждение о состоянии объекта контроля. Такой контроль широко применяется в современных системах с использованием ЭС.
Операции контроля могут выполняться как с участием человека, так и без его участия, то есть автоматически. Уровень автоматизации систем контроля может быть определен приближенно отношением объема операций, выполняемых ручным способом, к общему объему операций процесса контроля. Автоматизированными системами контроля называются обычно системы, у которых это отношение составляет не более 5%, у частично автоматизированных систем оно находится от 5 до 50%, у ручных превышает 50%.
Не следует считать, что автоматизация контроля экономически выгодна всегда. Она становится выгодной, как правило, по мере увеличения количества операций и объектов контроля и сокращения времени, отводимого на контроль. При проведении многочисленных однообразных проверок человек на определенном этапе не может справиться с большим потоком контрольной информации, увеличивается количество ошибок контроля, возникает необходимость в автоматизации операций контроля. Автоматизация контроля совершенно необходима, когда участие человека в процессе контроля невозможно. Особо нужно подчеркнуть важность автоматизированного контроля для работы современных автоматизированных систем управления.
При наличии для одного контролируемого параметра двух или более установок и определяемых ими зон допуска контролируемых величин такой контроль называют допусковым.
Нужно отметить безусловное родство процессов контроля и измерения, заключающееся в обязательном наличии операций сравнения входных или производных от них величин, которые получаются в результате измерительных преобразований. Более того, измерительное преобразование является, как правило, составной и основной частью системы контроля.
До недавнего прошлого арсенал средств измерения ограничивался неавтоматическими и автоматическими измерительными приборами, предназначенными для измерения одной величины или небольшой группы однородных величин, обычно не изменяющихся за цикл измерения.
1.3 Автоматизированные ИИС
В последние годы, в первую очередь в связи с резкой интенсификацией и автоматизацией технологических процессов самого разного назначения (в том числе и при использовании электронных средств), а также с расширением фронта научных экспериментов, существенно изменились требования к средствам измерения и контроля.
Новые требования связаны, главным образом, с переходом к получению и использованию результатов не отдельных измерений, а потоков измерительной информации. Зачастую необходимо получать информацию о сотнях и тысячах однородных или разнородных измеряемых величин, часть из которых может быть недоступной для прямых измерений.
Как правило, получение всего объема измерительной информации должно выполняться за ограниченное время. Если эти функции возложить на человека, вооруженного лишь простейшими измерительными и вычислительными устройствами, то в силу физиологических ограничений он, даже при весьма значительной тренировке, не сможет их выполнять. Причем, в ряде случаев, из-за опасных условий эксперимента или вредности технологического процесса участие человека-оператора может быть вообще недопустимым.
Таким образом, на определенном этапе развития информационно-измерительной техники появилась проблема создания новых средств, способных разгрузить человека от необходимости сбора и обработки интенсивных потоков измерительной информации.
Решение этой проблемы в области ИИТ привело к появлению нового класса информационно-измерительных систем (ИИС) – автоматизированных ИИС, предназначенных для автоматизированного сбора и обработки измерительной информации. В автоматизированных ИИС измеряется и контролируется большое количество величин и выполняется значительная обработка информации. В связи с тем, что проблемы автоматизации решаются с помощью средств вычислительной техники, данный класс ИИС далее будем называть информационно-вычислительной системой (ИВС).
Подавляющее большинство ИВС базируется на использовании элементов современной электроники. Это во многом определяется наличием относительно хорошо разработанных методов и средств преобразования разнообразных контролируемых величин в электрические сигналы и удобством выполнения преобразований, передачи и обработки электрических сигналов. Поэтому большинство реализации ИВС основывается на электрическом принципе действия.
Основная концепция ИВС как нового класса ИИС была сформулирована в начале 60-х годов. В основу концепции этого класса уже в то время была положена системная организация совместной автоматической работы средств получения, обработки и передачи количественной информации. Тогда были созданы ИВС, которые можно отнести к первому поколению таких систем. Системы первого поколения характеризуются централизованным циклическим получением измерительной информации и обработкой ее в основном с помощью входящих в состав ИВС специализированных вычислительных устройств, использованием в качестве элементной базы дискретной полупроводниковой техники. Дальнейшая обработка информации при необходимости в большинстве случаев производилась вне ИВС, в универсальных ЭВМ, занятых обслуживанием и других источников информации. Однако сложные ИВС в то время имели в своем составе ЭВМ, выполняющие только задачи, стоящие перед этими системами.
ИВС второго поколения (70-е годы) характеризуются адресным сбором измерительной информации, гибкостью, способной к наращиванию, с обработкой информации с помощью ЭВМ, входящих в состав систем, и в меньшей степени с помощью специализированных вычислительных устройств, с использованием в качестве элементной базы микроэлектронных схем малой и средней степени интеграции.
Широкое введение ЭВМ в состав ИВС стало возможным после организации промышленного выпуска управляющих вычислительных машин и комплексов, а также малых ЭВМ с достаточными вычислительными и логическими возможностями, гибким программным управлением, приемлемыми габаритами, потребляемой энергией и стоимостью.
Улучшение многих характеристик ИВС было достигнуто благодаря использованию больших интегральных микросхем, микропроцессоров, микропроцессорных наборов (включая устройства памяти с большим объемом запоминаемой информации) и микроЭВМ.
Качественно новые возможности при проектировании, изготовлении и эксплуатации ИВС были получены при применении стандартных цифровых интерфейсов и промышленных функциональных блоков, совместимых между собой по информационным, метрологическим, энергетическим и конструктивным характеристикам. Применение в ИВС ЭВМ и стандартных цифровых интерфейсов привело к необходимости формального описания алгоритмов действия систем и к резкому возрастанию роли программного обеспечения систем.
Оказалось, что для цифровых централизованных ИВС с программным управлением можно организовать промышленный выпуск универсального цифрового ядра, в которое входят цифровые измерительные и вычислительные средства и стандартные устройства ввода и вывода цифровой информации.
В начале 80-х годов создается и начинает использоваться третье поколение ИВС, в котором более широкое применение получают системные измерительные преобразователи, позволяющие, подобно пиксельному изображению на мониторе, одновременно воспринимать целые поля исследуемых величин параметров, характеризующих состояние контролируемого объекта. Рассредоточение вычислительной мощности по различным уровням и блокам ИВС уменьшает потоки информации, сокращает общее время обработки, повышает надежность работы системы. В ИВС более широко осуществляется многофункциональная обработка измерительной информации благодаря рациональному сочетанию средств с жесткой структурой (аппаратная реализация) и гибкими перестраиваемыми структурами и программами работы. Создаются измерительные, контрольные и другие роботы, в связи с чем ИВС приобретают внутренние функции управления. В быстродействующих ИВС, работающих в реальном времени, объединяются процедуры измерения и обработки информации. Существенно расширяется применение устройств памяти. Более широко используются выпускаемые промышленностью наборы функциональных устройств, объединяемых стандартными интерфейсами. Большое значение приобретают диалоговые режимы работы оператора с ИВС. В элементной базе резко увеличивается доля интегральных микросхем большой и сверхбольшой степени интеграции.
В настоящее время в состав ИВС входят микропроцессоры, малые ЭВМ и другие вычислительные устройства; в некоторых ИВС измерительные и вычислительные процедуры выполняются одновременно и неразрывно (функциональные аналого-цифровые преобразователи и тому подобное).
В соответствии со сказанным в данном курсе рассматриваются в первую очередь структуры и алгоритмы функционирования ИВС и их частей: аналого-цифровых подсистем, микроЭВМ, информационных каналов и тому подобное.
Кроме обработки информации, автоматизированные ИИС реализуют и некоторые функции управления, в связи с чем системы имеют полное название – информационно-управляющие системы (ИУС). Функции управления ИУС можно разделить на три вида:
- функции управления объектом, связанные только с результатами контроля (например, произошел перегрев прибора – включить принудительное охлаждение);
- функции проверки (тестирования) и коррекции измерительно-информационных каналов;
- функции управления системой отображения информации.
Следует заметить, что если структуру современных ИВС как класса ИИС можно представить достаточно общей функциональной схемой, то структура управляющих воздействий ИУС достаточно индивидуальна и обусловлена особенностями объекта контроля.
1.4 Роль ИУС в электронных системах
Эффективность применения промышленной аппаратуры и аппаратуры научного назначения в значительной степени зависят от правильности функционирования электронных средств, входящих в их состав. Под правильностью функционирования в первую очередь понимается соответствие режимов функционирования заданным установкам и программам режимов ЭС.
Системы контроля и управления ЭС базируются на измерительной информации, источников которой на одном объекте ЭС может составлять свыше 500 единиц. Особенностью систем измерения, контроля и управления ЭС является то, что они являются встроенными в структуру устройств самого различного назначения и являются их неотъемлемой частью. Для характеристики задач ИУС ЭС можно разделить на две группы: группа систем измерения и контроля и группа систем управления по результатам измерения и контроля.
Встроенная аппаратура автоматического измерения и контроля ЭС реализует такие важные функции, как контроль ЭС перед началом и в процессе работы и автоматический поиск неисправностей в аппаратуре, охваченной, как правило, системой диагностирования.
В целях диагностики специальной тестовой аппаратурой вырабатываются различные имитационные сигналы.
В результате диагностирования выдается условный номер неисправного блока и номера возможных неисправных узлов в данном блоке. В более развитых системах диагностики выдается также код неисправности (например, обрыв – 01, короткое замыкание – 02, отклонение значения питающего напряжения от номинала в сторону уменьшения – 03 и так далее).
Функции управления ЭС, связанные с результатами измерения и контроля, предназначены для централизованного включения и управления режимами работы аппаратуры, сопряжения с центром АСУ по управлению режимами аппаратуры и выдачи в центр АСУ информации о состоянии аппаратуры.
1.5 Структура и функциональные задачи ИУС
Превалирующую долю в автоматизированных системах измерения, контроля и управления составляет автоматизированная система сбора и обработки информации об управляемом объекте. Прежде чем начать изложение о структуре и функциональных задачах в ИУС, необходимо уточнить (конкретизировать) понятие «Информационно-вычислительная система» (ИВС). Информационно-вычислительную систему (ИВС) можно рассматривать как подкласс средств информационной техники — информационно-измеритель-ных систем (ИИС). В подобных системах необходимая информация об объекте контроля (ОК) получается с помощью системы измерительных датчиков и датчиков состояний (концевых датчиков), установленных на нем, а обработка этой информации производится с помощью вычислительных средств.
По мере развития цифровой вычислительной техники в ИВС происходила унификация ряда измерительных и вычислительных процедур: после аналого-цифрового преобразования результаты измерений вводились в ЭВМ, где программным путем выполнялись операции обработки, необходимые для получения результатов измерения и контроля состояния объектов. Наиболее широкое развитие получили ИВС с включенной в их состав микро-ЭВМ с открытой архитектурой (способной к вариации и наращиванию аппаратных средств), появившиеся в конце 80-х годов. Наличие одноплатных контроллеров позволило перейти от выполнения ряда операций измерения и обработки информации аппаратурным путем по жесткой программе к их выполнению по изменяющимся программам, к варьированию в процессе работы программным путем структуры и состава работающих функциональных устройств системы. На современном этапе развития ИУС свойства подобных микроконтроллеров определяют подавляющую часть качественных и количественных характеристик ИУС.
1.6 Классификация и основные характеристики ИУС
При выборе классификационных признаков ИУС целесообразно отвлечься от многочисленных особенностей, определяемых узким назначением систем и их конструктивным исполнением, и сосредоточиться на наиболее общих, системных отличительных особенностях. В то же время число классификационных признаков должно быть ограниченным, но достаточным для характеристики основных разновидностей ИУС.
Необходимо отметить, что, несмотря на важность знания метрологических характеристик ИУС, употребление их в качестве классификационных признаков связано с существенными трудностями. Действительно, все метрологические характеристики (погрешность, быстродействие и другие) являются количественными. Видимо, сопоставление ИУС по количественным характеристикам эффективно только для ИУС с одинаковым, сравнительно узким функциональным назначением.
Предлагаемая классификация построена по принципу разделения области, характеризуемой каждым выбранным признаком, на две непересекающиеся подобласти. При этом предполагается, что в реальных системах могут быть их комбинации. Так, например, реально существуют ИУС не только с последовательным или параллельным, но и со смешанным выполнением операций получения информации.
В обобщенной структурной схеме ИУС (рисунок 1.1) показаны основные блоки ИУС и их взаимосвязь. Но нужно иметь в виду, что для реализации одних и тех же функций могут быть созданы структурные элементы системы, существенно различающиеся как по их внутреннему построению, так и по алгоритму работы. Поэтому общую классификацию ИУС целесообразно произвести по наиболее общим принципам их построения (таблица 1.1).
Таблица 1.1 – Классификация принципов построения ИУС
|
Классификационный признак |
Бинарные отличия |
|
|
1. Наличие специального канала связи |
Отсутствует |
Имеется
|
|
2. Порядок выполнения операций получения информации |
Последовательный |
Параллельный |
|
3. Агрегатирование состава системы |
Агрегатированный |
Неагрегатирован-ный |
|
4. Использование стандартного интерфейса |
Не используется |
Используется |
|
5. Наличие программно-управляемых вычислительных устройств (микропроцессоры, микроЭВМ и прочее) |
Отсутствуют |
Имеются |
|
6. Наличие контуров информационной обратной связи |
Разомкнутые Системы |
Компенсационные(одно- и много-контурные системы) |
|
7. Изменение скоростей получения и выдачи информации |
Без изменения(в реальном масштбе времени) |
С изменением скоростей |
|
8. Сигналы, используемые в ИУС |
Аналоговые |
Кодоимпульсные |
|
9. Структурная и информационная избыточность |
Безызбыточные Системы |
Избыточные системы |
|
10. Адаптация к исследуемым величинам |
Неадаптивные Системы |
Адаптивные системы |
Сделаем краткие пояснения к классификационным признакам этой таблицы 1.1.
Наличие специального канала связи, обеспечивающего передачу качественной информации от объекта, находящегося на большом расстоянии, приводит к необходимости решения ряда специфических вопросов. В соответствии с этим нужно выделить специальный класс телеметрических (дистанционных) систем — ИУС дальнего действия.
Выполнение последовательно или параллельно операций получения информации во многом определяет количество элементов системы, быстродействие, надежность и тому подобное. Измерительная информационная система может состоять из частей, в которых последовательность операций получения или преобразования информации может быть различной. Естественно, в системе для перехода от параллельного к последовательному выполнению преобразований информации и наоборот должны использоваться соответствующие согласующие устройства.
Использование пригодных для совместной работы функциональных блоков стандартных агрегатных комплексов и стандартных цифровых интерфейсов существенно определяет многие характеристики ИУС.
Наличие в составе узлов (модулей) ИУС программно-управляемых цифровых вычислительных средств (микропроцессоров, микроЭВМ и микроконтроллеров) является очень важным классификационным признаком. Система, содержащая такие средства, обладает определенной универсальностью, так как при соответствующем программном обеспечении может (при ограниченном быстродействии) выполнять функции систем различного назначения.
В ИУС можно выделить универсальное ядро, в которое входят часть аналоговых преобразователей (например, масштабные преобразователи, аналоговые коммутаторы), аналого-цифровые преобразователи, часть цифровых преобразователей (цифровые коммутаторы и устройства памяти), ЭВМ, набор устройств отображения и регистрации информации, средства интерфейса и устройства, формирующие воздействия на исследуемый объект. Это ядро ИУС часто называют измерительно-вычислительным комплексом (ИВК).
Измерительно-вычислительные комплексы при известных условиях могут создаваться на базе специализированных цифровых вычислительных машин (СЦВМ), входящих в состав технологических комплексов специального назначения.
Наличие контура обратной информационной связи позволяет организовать компенсационные методы измерения, позволяющие получить более высокие точностные характеристики.
Изменение скоростей получения и выдачи информации в ИУС возможно главным образом при использовании запоминающих устройств (ЗУ). Оно может быть, например, применено для быстрого запоминания значений исследуемых величин и медленной выдачи информации и наоборот.
Введение адаптации ИУС к исследуемым величинам, структурной и информационной избыточности в целях повышения надежности, помехоустойчивости, точности, гибкости работы и тому подобное типично для системотехники. Можно предполагать, что дальнейшее развитие ИУС во многом будет зависеть от решения этих вопросов.
Приведенная бинарная классификация по десяти признакам позволяет различать 210=1024 разновидностей ИУС по принципам построения.
1.7 Типовая схема и характеристика решаемых задач ИУС
По существу современные ИУС в первую очередь предназначены для контроля состояния объекта на основе измерительной информации, представленной совокупностью значений и состояний технологических параметров. Отличительные признаки современных ИУС:
1) ограниченный набор четко сформулированных задач;
2) оптимизация структуры ИУС для конкретного применения;
3) работа в реальном масштабе времени, то есть обеспечение минимального времени реакции на изменение внешних условий;
4) высокие требования по надежности с учетом большой продолжительности непрерывной работы;
5) сложные условия эксплуатации;
6) обеспечение автоматического режима работы или режима с участием оператора как элемента системы.
Именно эти качества характеризуют процесс синтеза современных ИУВС, определяют их структуру и набор функциональных задач.
1.8 Типовая структура ИУС
В общем виде структура типового узла (модуля) ИУС представлена на рисунке 1.1. Здесь:
Рисунок 1.1 – Макроструктурная схема ИУС
ОУ — объект управления; содержит датчики входной информации ДВИ;
УСО - устройство сопряжения с объектом и одноплатным контроллером;
ПУО - пульт управления оператора;
СОИ - система отображения информации;
СТРУКТУРНЫЕ связи (стрелки) - устройства передачи информации между элементами системы и сетью (управляющей вычислительной сетью – ЛВС).
Ядром ИУС, реализующим процесс переработки информации и формирования воздействий на объект управления ОУ, является микроконтроллер, реализованный в современных системах ИУС, в зависимости от сложности задач, на однокристальном контроллере (ОК). Применение микроконтроллера способствует:
- повышению надежности;
- снижению стоимости системы;
- сокращению сроков разработки аппаратных средств и программного обеспечения;
- быстрой адаптации к изменениям требований заказчика в процессе разработки системы и в период ее модернизации;
- более простому осуществлению функций распределенного, децентрализованного управления;
- обеспечению модульного принципа построения системы.
Самой сложной связкой является связка ДВИÞУСО, которая по существу есть система предварительной обработки данных – СОД. В общем случае, исходя из требования ввода информации в микроконтроллер, она должна содержать: группу датчиков первичной информации, размещенных в непосредственной близости от объекта управления, контроля или измерения, блок преобразователей аналоговых сигналов датчика в цифровые коды (АЦП), цифровые и аналоговые коммутаторы, аналоговые вычислительные устройства, цифровые и аналоговые каналы связи, блок преобразователей цифровых сигналов в аналоговые (ЦАП), цифровые регистрирующие устройства.
Различные требования по стоимостным и техническим характеристикам, предъявляемые к СОД, определяют возможность вариаций структуры СОД на основе выбора метода обработки сигналов.
На рисунке 1.2-а показана структура, реализующая принцип параллельной обработки аналоговых сигналов, поступающих от датчиков СОД. Данная структура позволяет обеспечить максимальную производительность аппаратуры всех каналов систем СОД (из-за независимости обработки каждого сигнала) и высокое качество преобразования сигналов вследствие возможности системы по обеспечению требуемого уровня нормализации сигнала на входе АЦП в каждом канале.
Предельное количество каналов системы СОД в данном случае ограничено допустимым значением динамической погрешности преобразования i-го параметра, то есть:
Nц< Dxi доп / [(dxi /dt)max tк], (1.1)
где Nц — предельно допустимое количество цифровых каналов преобразования системы СОД;
Dxi доп — допустимое значение динамической погрешности i-го параметра;
(dxi/dt)max — максимальное значение производной i-го параметра в диапазоне преобразования;
tк — период коммутации.
Д — датчик; СУ — согласующее устройство; СН — схема нормализации; ФП — функциональный преобразователь; АЦП — аналого-цифровой преобразователь; ЦМ — цифровой мультиплексор; В/Х — схема выборки — хранения; AM — аналоговый мультиплексор; УУ — устройства управления.
Рисунок 1.2 – Структура системы СОД с параллельными цифровыми (а) и аналоговыми (б) выходами; с последовательными аналоговыми (в) и с последовательными и параллельными аналоговыми (г) выходами
Независимость отдельных ветвей дает возможность просто (в структурном смысле) реализовать необходимые функциональные преобразования аналоговых сигналов. Большое преимущество такой системы заключается в устранении ошибок, возникающих при коммутации и выборке — хранении аналоговых сигналов, вносящих основной вклад в суммарную погрешность преобразования. Очень важно то, что эта структура позволяет значительно повысить помехозащищенность системы на основе использования цифровых каналов передачи данных на вход ЭВМ, если обеспечить преобразования сигналов непосредственно на выходе датчиков. Такой вариант построения системы сбора данных имеет большое будущее, однако на современном этапе развития микросхемотехники при его реализации имеет место более высокая стоимость СОД вследствие сравнительно высокой стоимости интегральных схем АЦП.
Другие варианты построения структуры системы СОД основаны на принципе последовательной обработки аналоговых сигналов и перенесении мультиплексирования из цифровой в аналоговую область, а также применения аналоговых схем выборки — хранения для фиксации аналоговых сигналов на входе АЦП. Это дает возможность использовать только один АЦП независимо от числа аналоговых входов, предельное количество которых можно определить из выражения
Nа< Dxiдоп / [(dxi /dt)max (tк+ tп)], (1.2)
где:
Nа — предельно допустимое количество аналоговых каналов преобразования СОД;
ta—период цикла преобразования.
Остальные обозначения соответствуют (1.1).
Высокие технические характеристики свойственны структуре, приведенной на рисунке 1.2б, хорошее качество преобразования обеспечено теми же функциональными блоками, которые были включены в состав структуры, приведенной на рисунке 1.2а. Очевидно, что производительность системы сбора данных, построенной по структуре, изображенной на рисунке 1.2б, находится в прямой зависимости от быстродействия АЦП и ограничена его динамическими параметрами, поэтому в подобных системах необходимо применять АЦП с максимальным быстродействием. Применение дополнительных элементов для обработки аналоговых сигналов мультиплексоров, схем выборки — хранения ухудшает точностные характеристики системы в целом.
Практически идентичными характеристиками по сравнению со структурой, изображенной на рисунке 1.2б, обладает СОД со структурной схемой, изображенной на рисунке 1.2в.
Наиболее простой, но обеспечивающей относительно низкое качество преобразования, является СОД , структурная схема которой представлена на рисунке 1.2г. Она хороша при высоких уровнях и полной идентичности сигналов с датчиков.
1.9 Характеристика решаемых задач ИУС
С учетом приведенной структуры модуля ИУС, типовые задачи, решаемые ИУС, классифицируются следующим образом:
1) ввод и предварительная обработка входной информации в УСО;
2) обработка входной информации в микроЭВМ;
3) решение основных функциональных задач и выработка управляющих воздействий в микроЭВМ;
4) диагностирование ИУС;
5) вывод управляющих воздействий;
6) обмен информацией через ЛВС.
1.10 Ввод и предварительная обработка информации в устройстве сопряжения с объектом
При решении задач этого класса основными целями обработки входной информации в УСО являются предварительная фильтрация входных сигналов и приведение входной информации к стандартной для микроЭВМ ИУС форме.
Преобразование входной информации и сигналов, заданных в виде напряжений, токов, углов поворотов валов и так далее, осуществляется в большинстве случаев стандартными средствами.
1.11 Обработка входной информации в микроЭВМ
Этот класс задач, решаемых ИУС, представляет собой этап обработки информации, связанный с контролем правильности приема входной информации; сглаживанием (фильтрацией) входной информации для выявления полезного сигнала на фоне помех.
Для сглаживания входная информация, описывающая состояние объекта управления, поступает в микроЭВМ в виде дискретных или решетчатых функций. Дискретная функция — функция f(t), получившаяся в результате выборки в моменты времени t=nTo (где То— шаг дискретизации; п — натуральный ряд чисел) данных с датчика входной информации. Таким образом, в микроЭВМ ИУВС должны быть реализованы алгоритмы сглаживания дискретных функций, искаженных помехами, которые обусловлены случайными ошибками измерения. Реализация алгоритмов сглаживания сводится к нахождению такой функции F(t), которая дает наилучшее приближение к заданной. Вид функции F(t) зависит от характера изменения во времени параметров состояния объекта управления.
Для широкого класса типов объектов управления в качестве сглаживающей функции выбирается полином s-й степени:
F(t) = а0+а1t+a2t2+…asts , (1.3)
где ai — коэффициенты, полученные для выбранного типа интерполяции (Лагранжа, Ньютона, Эверетта, Стирлинга, Бесселя, Гаусса, сплайн-функции).
Значение количества фиксированных выборок N , используемых для интерполяции, связано с динамикой изменения состояния объекта управления. При большом N увеличивается наблюдательное время Т=NTo , при малом N увеличивается ошибка сглаживания. Таким образом, при выборе алгоритма сглаживания ищется компромисс между допустимой ошибкой сглаживания и требуемой реакцией ИУС на изменение состояния объекта.
1.12 Решение основных функциональных задач и выработка управляющих воздействий в микроЭВМ
Этот класс задач, решаемых ИУС, наиболее объемный. Он включает в себя следующие независимые программно-логические блоки, управляемые супервизором (главным программным диспетчером):
- распределение ресурсов ИУС;
- выбор источников и потребителей информации;
- прогнозирование изменения состояния объекта контроля по его характеристикам и измеренным параметрам и выработки управляющих воздействий;
- информационный обмен в ЛВС;
- взаимодействие с оператором, в том числе – вывод информации;
- автоматическое слежение и адаптация системы к изменяющимся условиям.
По содержанию решения этих задач их можно разделить на два типа функциональных задач.
К первому типу задач относится задача преобразования координат системы измерений в систему координат исполнительных элементов, так как в силу конструктивных и технологических ограничений пространственное положение датчиков входной информации и исполнительных элементов, оказывающих непосредственное воздействие на объект управления, различно.
Необходимость в пересчете, преобразовании (масштабировании) входных данных вызывается также невозможностью непосредственного измерения какого-либо параметра h. В этом случае значение h можно оценить косвенно по измеряемым значениям c1, c2, …,cn, при условии существования возможности однозначного выражения в виде h =f(c1, c2, …,cn). Например, для определения влажности на объекте необходимы две измеряемых температуры: температура tc сухого и температура tв влажного термометров. Тогда влажность можно вычислить по известной формуле: С=km(tc- tв), где km – коэффициент перерасчета (масштаба).
Второй тип задач наиболее представителен и включает в себя задачи:
а) прогнозирования;
б) функционального преобразования;
в) логического управления;
г) взаимодействия оператора с ИУС.
Приведенное разделение является условным, но охватывает значительный объем встречающихся на практике задач.
Характерными задачами прогнозирования являются задачи управления технологическими процессами. Суть решения задачи заключается в определении динамических параметров (производных), характеризующих объект управления, экстраполяция функции поведения объекта по заданному параметру.
Для решения задач подобного типа используют различные итерационные методы. Однако при построении специализированных ИУС целесообразным является применение не традиционных, а применительно к конкретной задаче конкретных способов решения.
В ИУС особое место занимают задачи функционального преобразования. Необходимость реализации этих задач вызывается:
- сложностью выражений, полученных аналитическим путем, и, как следствие, трудностями при их реализации в микроЭВМ ИУС;
- экспериментальным характером получения функциональных зависимостей.
Как в первом, так и во втором случаях основными способами представления функциональных зависимостей являются табличный способ с интерполяцией и способ аппроксимирующих многочленов. Выбор способа интерполяции обусловлен характером функциональной зависимости и допустимой ошибкой получения функции. Наиболее часто используются линейные и квадратичные формулы с постоянным шагом интерполяции.
Аппроксимация производится по экспериментально полученным или заданным в виде таблиц или графиков функциональным зависимостям. Степень аппроксимирующего многочлена определяется на этапе проектирования ИУС экспериментально, исходя из заданной погрешности.
Решение большого количества задач в микроЭВМ ИУС связано с логическим управлением состояниями объекта. Наиболее часто встречаются ИУС, относящиеся к категории систем управления с памятью, в которых набор выходных сигналов, вырабатываемый в некоторый отрезок времени, зависит не только от входных сигналов, поступивших в тот же момент, но и от сигналов, принятых ранее.
Иначе: совокупность управляющих сигналов, вырабатываемых ИУС, определяется не только входными сигналами, но и внутренними состояниями автомата. Соответственно, управляющие воздействия могут быть выработаны в соответствии с системой функций выходов и переходов автомата.
Таким образом, в микроЭВМ ИУС должна быть программно реализована адекватная модель реального объекта управления.
Задачи взаимодействия оператора с ИУС разделяются на задачи:
- выработки информационных сообщений о состоянии объекта управления, ИУС и о режиме работы;
- взаимодействия с оператором как элементом системы автоматического регулирования.
При решении первой группы задач вырабатываются информационные сообщения, непосредственно не влияющие на взаимодействие ИУС с объектом управления, но дающие оператору дополнительные данные о характеристиках процесса управления. Например, при выводе станции на рабочий режим в зимнее время осуществляется автоматическое изменение температуры нагревательных элементов, однако при этом оператору могут выдаваться сообщения о времени окончания процесса, о температуре в данный момент времени.
Используемые в ИУС алгоритмы для формирования информационных сообщений не требуют, как правило, высокой точности реализации, и допустимое время их выработки не является определяющим для системы в целом.
При решении второй группы – при реализации взаимодействия ИУС с оператором как элементом системы автоматического регулирования – динамика оператора в ряде случаев может быть описана в виде передаточной функции
W(p) =ko e-pt/(1+pTo), (2.4)
где ko, t, То — соответствующие параметры оператора, полученные экспериментальным путем.
1.13 Диагностирование ИУС
Задачи этого класса в рассматриваемых ИУС являются очень специфическими и строго индивидуальными. Главная их цель:
- обнаружение внезапного отказа;
- обнаружение отказавшего узла (блока конструкции с указанием номера блока).
1.14 Вывод управляющих воздействий
Задачи вывода управляющих воздействий включают в себя выполнение следующих основных процедур:
- упорядочение, сортировка в микроЭВМ ИУС информации, подлежащей передаче на объект управления;
- кодирование информации;
- программное формирование посылок информации в соответствии с протоколом обмена между ИУС и объектом управления;
- формирование сигналов по форме и мощности в соответствии с требованиями исполнительных элементов объекта управления.
1.15 Обмен информацией через ЛВС
Задачи обмена информации через ЛВС разделяются на три типа:
- программная реализация протокола обмена данными между ИУС и абонентом ЛВС;
- прием и обработка команд управления режимами узла ИУС от управляющей ЭВМ или оператора центрального пункта контроля и управления объектами технологического комплекса;
- выдача требуемой информации в адрес управляющей ЭВМ или оператору центрального пункта контроля и управления объектами технологического комплекса по разовому адресному запросу или в соответствии заданным временным отсчетам.
1.16 Формы представления входной информации
Многообразие форм задания алгоритмов работы ИУС, многообразие задач, решаемых ИУС, широта номенклатуры датчиков входной (первичной) информации приводят к тому, что входная информация может быть представлена в следующих формах:
- цифровой (параллельный n-разрядный двоичный код, последовательный двоично-десятичный код и так далее);
- аналоговой (амплитуда переменного тока или напряжения, фаза или частота колебаний, значение тока и тому подобное);
- в виде импульсных и изменяющихся скачкообразно (релейных) сигналов.
Информация в цифровой форме вводится в ИУС, как правило, по какому-либо стандартному последовательному или параллельному интерфейсу, которые будут рассмотрены в рамках следующих тем. Поэтому вопросы подключения датчиков цифровой информации к средствам вычислительной техники решаются унифицировано. Однако разработчику ИУС при ее проектировании необходимо уточнить следующие данные об информации, вводимой в систему в цифровой форме:
1) разрядность ri входной информации по каждому i–му сигналу;
2) цену младшего разряда для каждого входного сигнала (МЗРi);
3) диапазон представления сигналов xmax и xmin ;
4) первую, а иногда и вторую производные сигналов;
5) количество достоверных разрядов rдi,;
6) закон изменения шумов и его параметры;
7) скорость передачи информации;
8) территориальную удаленность датчика входной информации от ИУС.
Информация в аналоговой форме, вводимая с датчиков и задатчиков, как правило, представляется в виде медленно меняющихся напряжений постоянного тока, модулированного по амплитуде и фазе синусоидального напряжения, импульсов напряжения или их последовательности. Информация в последних случаях кодируется длительностью, амплитудой, площадью импульса или периодом следования импульсов.
При проектировании ИУС в случае аналогового представления информации необходимо знать:
1) минимальное xmin и максимальное xmax значения величины, кодируемой аналоговым сигналом Ах, коэффициент пропорциональности (масштаба) Кх= Ах /х;
2) вид аналогового сигнала (медленно меняющееся напряжение, синусоидальное напряжение, импульсная последовательность);
3) полосу частот входного сигнала DFx, и полосу частот аддитивных шумов DFш , маскирующих информационный сигнал;
4) закон изменения шумов и его параметры (максимальное значение шумов Aщ, среднеквадратичное отклонение sщ);
5) точность представления входной информации, характеризуемой либо абсолютной Dх=х—хa, либо относительной dx=êDх/xmaxê (приведенной) погрешностью;
6) максимальную скорость изменения аналогового сигнала vx ;
7) параметры, определяющие особенности подключения датчика к ИУС, например, выходной импеданс датчика или требуемый входной импеданс канала ввода информации в ИУС.
Информация в виде релейных сигналов поступает в ИУС, как правило, по схемам, примеры которых приведены на рисунке 2.2а, с исключением структурных элементов СН, ФП, АЦП. Для подобного типа датчиков о входной информации необходимо знать:
1) принадлежность каждого датчика к какой-либо функциональной группе (к системе стабилизации объекта управления, к системе управления манипулятором и так далее);
2) максимальные и минимальные частоты включения каждого датчика и время нахождения датчика во включенном (выключенном) состоянии;
3) максимально допустимое время «дребезга» контактов каждого датчика.
Формулируя требования на разработку ИУС, необходимо уточнить вышеуказанные параметры всех входных сигналов и систематизировать их.
1.17 Формы представления выходной воздействий
Выходные сигналы ИУС могут быть также представлены либо в цифровой, либо в аналоговой форме, либо в виде релейных сигналов и предназначены:
- для управления элементами объекта контроля;
- для управления элементами системы отображения информации (СОИ) о состоянии объекта контроля.
Все требования, предъявляемые к выходным воздействиям, целиком определяются параметрами исполнительных элементов объекта контроля и СОИ (разрядность цифровой информации, вид кодирования, ток, напряжение, мощность, интенсивность и тому подобное), то есть являются строго индивидуальными.
В заключение необходимо заметить, что используемые отечественные технические средства и элементная база в системах ИУС отстают от современных зарубежных технических образцов, выпускаемых серийно, по степени интеграции, но не уступают, а иногда и значительно превосходят их по надежности. Это объективный фактор, и он обусловлен в первую очередь вопросами надежности, которые требуют длительного промежутка времени для исследований и испытаний опытных и промышленных образцов ИУС.
Вместе с тем, чтобы прогнозировать принципы построения ИУС в промышленных системах в ближайшие годы, очень полезно ознакомиться с современными ИУС, используемыми в ряде интенсивно развивающихся промышленных отраслей: газовой, нефтяной, энергетике.
1.18 Характеристика микропроцессорных ИУС
Дальнейшее развитие микропроцессорной техники, в особенности появление микроконтроллеров с достаточно высокой производительностью и большим объемом оперативной памяти, позволило перейти к созданию почти полностью автономных систем сбора и обработки измерительной информации, выполненной в виде компактной конструкции. При этом сама система стала значительно проще и производительнее, надежнее и дешевле, так как существенно уменьшились материальные и временные затраты, связанные с программными и аппаратурными средствами связи с центральным обрабатывающим пунктом (центром управления).
1.19 Характеристика микропроцессорных средств ИУС
Различными фирмами, как зарубежными, так и отечественными выпускаются различные модули, с помощью которых можно собрать автоматизированные системы контроля и управления самого различного назначения. Основные принципы построения и проектирования микропроцессорных (МП) систем контроля, созданной на основе микроконтроллера 80С48-2 и выпускаемых к ней периферийных устройств. Но прежде всего необходимо ознакомиться с историей развития микропроцессорных ИУС, которая, несмотря на короткий отрезок времени, весьма насыщена.
В 80-х годах отечественная промышленность выпускала микроЭВМ, которые с успехом работают в автоматизированных системах контроля: «Электроника С-5», «Электроника-60», «Электроника МС 1201.01». Две последние модели микроЭВМ программно совместимы с рядом микро- и мини-ЭВМ, получивших широкое распространение в это же время как России, так и за рубежом. К семейству отечественных мини-ЭВМ данного типа относятся «Электроника 100-25», «Электроника-79», а зарубежных — мини-ЭВМ ряда PDP-11 и микроЭВМ LSI-11 (США). Характерной особенностью указанных ЭВМ является наличие общей магистрали, служащей для связи всех устройств, входящих в систему. Такая архитектура называется открытой. Подобно тому, как для 60-х годов стала образцовой архитектура ЭВМ IBM/360, для 70-х и 80-х годов для мини- и микроЭВМ стала образцовой архитектура PDP-11. Популярности ЭВМ PDP-11 способствовал также широкий диапазон разработанного и развивающегося математического обеспечения.
В настоящее время тенденция создания микроЭВМ с общей магистралью полностью закрепилась, вытеснив все другие идеологии архитектурных построений микроЭВМ. Изменилась лишь элементная база: на смену микропроцессорам в ИУВС приходят более интегрированные МП и однокристальные ЭВМ (ОЭВМ). Зарубежные образцы МП: i80486, i80586, i80586-II, i80586-III (США); образцы ОЭВМ: MCS-48, MCS-51, MCS-196, MCS-296 (Intel, США); образцы микроконтроллеров: PIC17C4x, PIC17C75 (MicroChip, США). Отечественные ОЭВМ: 1816ВЕ35, 1816ВЕ48, 1816ВЕ751 и другие; микропроцессоры: 580ВМ80М, 1821ВМ85, 1801ВМ2, 1801ВМ3 и другие.
Принцип объединения компонентов ЭВМ и периферийных устройств с помощью общей магистрали позволяет легко модифицировать систему в соответствии с конкретными потребностями. Форма связи каждого устройства, подключенного к общей магистрали, — стандартная.
В зависимости от конкретных условий применения приходится учитывать и такие факторы, как быстродействие, объем оперативной памяти, мощность потребления, габаритные размеры, надежность и тому подобное. Наиболее полно вышеприведенным критериям отвечала одноплатная микроЭВМ «Электроника МС 1201.03», воплощающая в себе значительные достижения отечественной технологии и к 90-м годам являющаяся наиболее совершенной среди аналогичного класса отечественных моделей. Основа ее — микропроцессорный комплект серии 1801, выполненный по n-канальной МОП-технологии. МикроЭВМ «Электроника МС 1201.03» предназначена для использования в АСУ ТП, контрольно-измерительной аппаратуре, в системах обработки цифровой информации общего назначения. Широкая область применения обеспечивается встраиванием ее в аппаратуру потребителя.
МикроЭВМ представляет собой систему функциональных устройств (рисунок 3.1), связь между которыми осуществляется через общую магистраль (единый системный канал обмена информацией). Минимальная конфигурация микроЭВМ содержит:
ЦП — процессор (АЛУ, цифровой автомат, генератор тактовых импульсов;
ОЗУ — оперативное запоминающее устройство (для хранения исходных данных и результатов вычислений);
ПЗУ — постоянное запоминающее устройство (для хранения операционной системы, программ отладчиков и тому подобное);
УПсИ — устройство последовательного интерфейса ввода-вывода информации;
УПрИ — устройство (байтового) параллельного интерфейса вывода;
Рисунок 1.3 – Структура микроЭВМ для ИУС
Общая магистраль – это расширение (удлинение) системной магистрали микропроцессорной системы, представляющую собой сформированную ЭВМ. МикроЭВМ на базе МП или ОЭВМ обеспечивает значительную гибкость, модульную простоту и упрощает разработку ИУВС.
Выбор типа МП или ОЭВМ производится исходя из возможности использования стандартного программного обеспечения существующих архитектур микро- и мини-ЭВМ, наличия развитого периферийного оборудования и возможности наращивания технических средств (как внешних устройств по отношению к микроЭВМ).
1.20Характеристика программного обеспечения
Эффективность ИУС в значительной мере определяется качеством ее программного обеспечения. Чтобы ИУС выполняла заданные ей функции, в памяти ЭВМ должна находиться последовательность команд, реализующая эти функции, то есть программа. Программа определяет порядок, в котором машина извлекает из памяти или из регистров внешних устройств ту или иную часть информации, коды операций (сложение, вычитание, пересылки и тому подобное), которые должны выполняться, адреса хранения результатов, адреса, откуда должны выбираться следующие команды при выполнении некоторых условий в исходных данных или в результатах вычислений.
Единственный язык, который «понимает» процессор ЭВМ, это машинный язык в двоичных кодах. Хотя разработчик ИУС и может использовать этот машинный язык, но затраты труда на разработку даже сравнительно небольшой программы при этом были бы огромны. Поэтому созданы специальные языки – заменители машинных языков – ассемблеры, где каждая машинная команда заменяется соответствующей ей фразой на человеческом языке. Для перевода программы, написанной на ассемблере, в машинные (двоичные) коды существуют специальные программы – компиляторы. Эти программы входят, как правило, в состав программных средств, поставляемой изготовителем микропроцессорной техники.
Кроме этого, разработчики микропроцессорной техники для средств контроля и управления поставляют эмуляторы – комплекс программных средств, позволяющих в среде мощных ЭВМ воспроизводить и отлаживать образы (модели) реальных модулей ИУС нужной архитектуры.
Более развитые микропроцессорные модули ИУС содержат в ПЗУ микроЭВМ программу отладчика (программу-монитор), которые позволяют отлаживать программу функционирования ИУС в среде реальных технических средств, а не их образов.
Широко используются для программирования работы узлов ИУС и языки высокого уровня: TurboPascal, Visual-C и тому подобное. Эти языки позволяют, например, составить удобный графический многооконный интерфейс для оператора, что весьма затруднительно сделать на ассемблере, хотя программы, написанные на ассемблере, являются самыми компактными.
Другим средством для написания программ функционирования узла ИУВС является интерпретатор – простейший язык программирования, не требующий специальных знаний и навыков в области программирования. В отличие от компилятора, который просто преобразует всю программу в последовательность машинных кодов, интерпретатор транслирует и выполняет исходную программу, написанную на языке интерпретатора, но по одной командной строке. Благодаря таким особенностям интерпретатора существенно облегчается написание и отладка программы, в нее легко вносить изменения и дополнения.
1.21 Структура централизованных микропроцессорных ИУС
Рассмотрим структуру типовой централизованной микропроцессорной ИУВС на примере реально существующих ИУВС на основе микроЭВМ типа «Электроника» (микропроцессор серии 1801) (рисунок 1.4)
Рисунок 1.4 – Схема ИУС на базе микроЭВМ с общей магистралью
Поскольку система централизованная, то она должна предусматривать рабочее место оператора, то есть должна иметь технические средства ввода команд и вывода информации о состоянии контролируемого объекта.
На рисунке 3.2 представлена структура ИУС, где
ВдТ — видеотерминал: дисплей на электронно-лучевой трубке и клавиатура;
УВВ — устройство ввода-вывода на магнитный носитель;
УВыв — устройство вывода на печать;
АЦП — узел аналого-цифровых преобразователей (преобразование входных измерительных аналоговых сигналов);
УВВ РС — устройство ввода и вывода релейных сигналов;
ЦАП – узел цифроаналоговых преобразователей (преобразование выходных аналоговых сигналов-воздействий).
Анализ этой схемы по отношению к схемам, приведенным на рисунке 2.2, показывает, что структура СОД соответствует структуре на рисунке 2.2-а, причем роль цифрового мультиплексора (коммутатора каналов ввода информации и вывода выходных воздействий) выполняет общая магистраль посредством адресации.
Общая магистраль имеет организацию Q-bus (совмещенная магистраль адреса и данных и шлейфовая организация магистрали управления) [1]. Для каждого устройства, подсоединенного к общей магистрали, вид связи одинаков. Процессор ЦП микроЭВМ (рисунок 3.1) использует один и тот же набор сигналов как для связи с ячейками оперативной памяти ОЗУ, так и для связи с периферийными устройствами. Каждой ячейке памяти и регистрам периферийных устройств присваивается определенный адрес. Благодаря такой структуре все команды для данных, хранящихся в оперативной памяти, в равной мере могут использоваться и для данных в регистрах периферийных устройств. Этот принцип — весьма существенная особенность микроЭВМ с общей магистралью, так как одно и то же множество команд можно применять как для вычислений, так и для управления вводом-выводом. Специальные команды ввода-вывода становятся ненужными, и ввод-вывод информации может быть совмещен с ее обработкой.
Связь между устройствами, соединенными общей магистралью, осуществляется по принципу «активный – пассивный» (ведущий – ведомый). В любой момент времени имеется только одно устройство, которое управляет магистралью и носит название «активный». Это устройство управляет работой магистрали при осуществлении связи с другим устройством, соединенным с магистралью и именуемым «пассивный». По умолчанию активным является процессор ЦП.
Наиболее типичным этот режим является по отношению к ОЗУ, являющимся буферной памятью для данных обмена и, в связи с этим, носит название прямого доступа к памяти – ПДП. Активным устройством, например, может быть накопитель на магнитном диске (НМД), передающий данные в ОЗУ, или какой-либо АЦП; в этот момент ЦП отключается от системной магистрали. Поскольку теоретически каждое устройство, подключенное к системной (общей) магистрали может быть активным, то между ними устанавливается градация приоритетов по режимам «захвата» системной магистрали. В режиме ПДП обмен данными осуществляется без программного управления со стороны процессора и является самым быстрым способом передачи данных между памятью и внешним устройством. Адресацию и управление размерами передаваемого массива должно обеспечить устройство, получившее прямой доступ к памяти.
Другой режим обслуживания срочного ввода или вывода информации обеспечивается с участием процессора, то есть, с использованием программ и является более гибким по отношению к режиму ПДП, но более медленным. Этот режим называется режимом аппаратного прерывания. В режиме работы по прерыванию обмен данными происходит по требованию периферийного устройства. При этом процессор приостанавливает выполнение текущей программы, чтобы обслужить запрашивающее устройство, вызвав для этого соответствую программу. После завершения выполнения программы обслуживания внешнего устройства по передаче данных процессор возобновляет выполнение прерванной программы с того места, где она была прервана. Реализация режима передачи данных по прерыванию позволяет процессору эффективно использовать время работы, исключая всякие режимы ожидания, работая одновременно с множеством процессов передачи данных между микроЭВМ и УСО, также системными устройствами ввода-вывода.
Для реализации режимов ПДП и аппаратного прерывания соответственно имеются две линии магистрали управления: линия «Запрос на прерывание» и линия «Запрос на прямой доступ к памяти», проходящие шлейфом через все устройства ввода-вывода. В том случае, когда два (или более) устройства одновременно посылают запросы на использование магистрали, предпочтение отдается тому устройству, электрическое соединение которого находится ближе к процессору ЦП.
1.22 Структура децентрализованных микропроцессорных ИУС
В настоящее время децентрализованные микропроцессорные ИУС составляют наиболее многочисленный класс систем контроля и управления. В общем случае архитектура типового модуля децентрализованной микропроцессорной ИУС, являющегося связующим звеном между частью контролируемого сложного (рассредоточенного) объекта и центральным пунктом управления, имеет вид, представленный на рисунке 1.5.
Рисунок 1.5 – Структура децентрализованной
микропроцессорной ИУС
В состав модуля децентрализованной микропроцессорной ИУС входят:
- микроЭВМ с системной магистралью Multi-bus (разделенные магистралями адреса МА и данных МД и радиальной магистралью управления /2/, в том числе: магистраль прерываний МПР и магистраль стробов управления обменом (стробы записи и чтения) СУО;
- устройство сопряжения с объектом УСО (на рисунке структурно выделены части УСО для ввода – УВв и вывода – УВыв);
- пульт управления ПУ с минимальной системой отображения информации СОИ (предназначено для контроля и наладки модуля ИУС);
- устройство сопряжения с сетевым окружением УССО (определяется видом линии связи с центральным пунктом управления: телефонная или коаксиальная проводная связь, оптоволоконная связь, радиосвязь)
Принадлежностью системы можно считать также датчики входной информации ДВИi и исполнительные элементы ИЭj, поскольку их параметры учитываются в УСО, в связи с чем они в целом составляют структуру СОД (п. 2.2.1, рисунок 2.2).
МикроЭВМ выполняет заданные резидентной программой, которая «зашита» в ПЗУ, преобразования информации и управляет работой всех составных частей ИУВС. В процессе работы микроЭВМ опрашивает состояние органов управления и задания режимов (тумблеры, переключатели) на пульте управления ПУ, и в зависимости от их положения реализует тот или иной режим функционирования модуля ИУС. Взаимодействие микроЭВМ с УСО, ПУ, СОИ и УССО осуществляется по внешним магистралям адреса МАВ, данных МДВ, прерывания МПР, составляющих общую магистраль. Для опроса требуемой в данный момент времени информации на магистрали МА микроЭВМ устанавливается адрес источника информации. Такими источниками могут быть тумблер ПУ, один из каналов ввода УСО, приемник УССО. В источнике информации определяется соответствие его номера адресу и обеспечивается выдача информации по магистрали МДВ. Аналогично осуществляется вывод информации.
В подавляющих случаях инициатором обмена является микроЭВМ, то есть ее основная (резидентная) программа. Вместе с тем, с целью уменьшения времени ожидания системы на изменения состояния объекта управления, УСО, ПУ и СОИ могут формировать запросы на прерывание работы в текущем режиме и временный (оперативный) переход к обработке новой информации. Для этого в ИУВС предусматривается магистраль прерывания МПР. Процедура ввода или вывода данных по прерыванию ничем не отличается от описанной выше в п.1.21.
Режим ПДП в таких модулях ИУС, как правило, не предусматривается.
2 Разработка структурной схемы.
2.1 Типовая схема включения модуля ИУВС в систему контроля и управления
Типовой микропроцессорный модуль ИУС по существу является цифровым автоматом с минимальным числом управляющих функций оператора (эти функции связаны, главным образом, с профилактическими работами и настройкой режимов). Как уже отмечалось в разделе 1, современные системы ИУС в подавляющих случаях строятся по децентрализованной архитектуре, с множеством микропроцессорных модулей ИУС под управлением мощного микроконтроллера, находящейся в некотором пункте контроля и управления объектом. Таким образом, чтобы ознакомиться с логически полной системой контроля и управления на основе модуля ИУС, необходимо рассматривать его в целом составе ИУС.
Указанные системы достаточно разнообразны и сложны, в том числе и в радиоэлектронных средствах, и при этом имеют иерархические уровни выше второго.
Контроллер состоит из управляющей ЭВМ, функции которой выполняет ПЭВМ (IBM PC/AT), и микропроцессорного модуля ИУС, выполненного на основе микроконтроллера. Связь между управляющей ЭВМ и модулем ИУС осуществляется через местную сеть с интерфейсом RS-232. Таким образом, на базе одной управляющей ЭВМ можно создать так называемый куст ИУС, содержащий несколько модулей ИУС, подключенных к управляющей ЭВМ через местную сеть. В свою очередь, в случае рассредоточенного объекта контроля и управления, кусты ИУС через ЛВС (второй уровень) организуются в систему, которая представляет собой логически завершенную систему контроля и управления всем объектом в целом. Контроллер является многофункциональным комплексом и предназначен для ввода-вывода дискретной и аналоговой информации, ее обработку в виде решения ряда функциональных задач.
Контроллер содержит следующие основные части (рисунок 2.1):
а) мощная ЭВМ с общей магистралью (совместимая с РС IВМ), содержащая:
— микропроцессор типа «Pentium»;
— ПЗУ и ОЗУ с контроллером памяти;
— накопитель НЖМД на жестком магнитном диске типа «Винчестер» с контроллером управления;
— накопитель НМД на гибком магнитном диске (floppy disk) с контроллером управления;
— видеотерминал ВТ с контроллером управления (video card);
— контроллер ПрВВ параллельного ввода-вывода (обычно используется для устройства печати – принтера);
— два контроллера ПсВВ для последовательного ввода-вывода, к одному из которых подключен манипулятор типа «Mouse», к другому – с использованием протокола обмена данными RS-232 – модуль ИУС;
— контроллер ЛВС (локальной вычислительной сети).
б) модуль ИУС на основе микроконтроллера 80С48-2 с параметрами:
— число вводимых релейных (дискретных) сигналов – 8;
Рисунок 2.1 – Структурная схема контроллера
— число выводимых релейных (дискретных) сигналов – 8;
— число вводимых аналоговых сигналов – 4;
— число выводимых аналоговых сигналов – 2.
Более подробно модуль ИУС представлено на рисунке 2.2. Модуль ИУС содержит следующие структурные элементы:
— микроконтроллер 80С48-2;
— преобразователи уровня ПУ1, ПУ2;
— цифровой мультиплексор;
— резистивные датчики угла положения Ra1 , Ra2;
— аналого-цифровые преобразователи АЦП1 – АЦП4;
— цифроаналоговые преобразователи ЦАП1, ЦАП2;
— узел инверторов 8-НЕ с ограничительными резисторами на выходе;
— инвертирующий усилитель ИУ для звуковой сигнализации;
— блок световых индикаторов L0 – L7;
— пьезокерамический излучатель звука ВЛ;
— стабилизатор напряжения +5В;
— преобразователь ПР напряжения «+12»® «-12В».
Рисунок 2.2 – Структурная схема УСО на базе микроконтроллера
3 Разработка и расчет схемы принципиальной электрической устройства сопряжения с объектом.
3.1 Разработка блока микроЭВМ
Блок микроЭВМ – это блок управления всем устройством. Он выполняет функции преобразования, приёма, передачи информации, обработки, обменом данными с ЭВМ, управления индикацией. Таким образом, блок микроЭВМ удобнее выполнить на программируемом устройстве.
На современном этапе развития АСКУ лидирующую роль в качестве микроЭВМ имеют микроконтроллеры. Это монокристаллическая структура, содержащая микропроцессор, порты, таймер, контроллер прерываний, ОЗУ, ПЗУ и другие элементы – в зависимости от назначения и фирм-изготовителей, – которые принято называть однокристальными микроконтроллерами (МС). Мировые лидеры в этой области – фирмы Siemens, Intel, Motorola и MicroChip. Независимо от фирм-изготовителей и назначения МС, все ОЭВМ по своей архитектуре и командам обработки данных очень схожи. В России выпускается семейство микроконтроллеров 80С, архитектурно и программно совместимых с 8-и разрядными МС фирмы Intel. Поэтому имеет смысл остановить свой выбор именно на этом семействе.
Серия 80С включает в свой состав несколько модификаций микроконтроллеров с идентичной структурой и некоторыми отличиями по быстродействию, емкости внутреннего ОЗУ и ПЗУ. Простейшие из них:
80С35 — с внешним ПЗУ, ОЗУ 64 байт и тактовой частотой 6 МГц;
80С39 — с внешним ПЗУ, ОЗУ 128 байт и тактовой частотой 11МГц;
80С48 — с внутренним перепрограммируемым ПЗУ 1 кбайт с ультрафиолетовым стиранием (УФ ППЗУ), ОЗУ 64 байт и тактовой частотой 6 МГц;
80С49 — с внутренним масочным ПЗУ 2 кбайт, ОЗУ 128 байт и тактовой частотой 11 МГц;
Для каждого микроконтроллера предусмотрена возможность расширения ПЗУ, ОЗУ и увеличения числа линий ввода-вывода за счет подключения внешних БИС ПЗУ, ОЗУ и интерфейсов ввода-вывода, используемых серией 80С.
Графическое обозначение микроконтроллеров серии 80С приведено на рисунке 3.1.
Микроконтроллеры (МК) серии 80С являются взаимозаменяемыми и совместимыми по выводам и системе команд, что обеспечивает пользователю максимальную гибкость при разработке микропроцессорных устройств (МП устройств).
МикроЭВМ 80С48 с перепрограммируемым ПЗУ используется на этапе отладки программы разрабатываемого изделия, а также изготовления его опытной партии. Переход к его серийному производству может осуществляться путем простой замены этого микроконтроллера на другой, имеющий ПЗУ, в которое отлаженная программа будет записана с помощью маски на последнем этапе изготовления БИС МК. Использование 80С49 с масочным ПЗУ экономически целесообразно при создании микропроцессорных устройств и систем, которые будут изготавливаться большими сериями и не будут подвергаться модернизации в процессе эксплуатации. Для изделий, требующих периодической модернизации (переналадки) или изготавливаемых малыми сериями, следует использовать МК с перепрограммируемым внутренним ПЗУ или с внешним ПЗУ.
Рисунок 3.1 – МК серии 80С
Не имеющие внутреннего ПЗУ 80С35 и 80С39 позволяют пользователю подбирать память для хранения программы в точном соответствии с его требованиями, используя широкий набор внешних ИС ПЗУ (573РФ2 и другие).
Таким образом выбираем микроконтроллер серии 80С48, так как он имеет внешнюю многократно перепрограммируемую память выполненную на ПЗУ.
Структурная схема МК серии 80С, отражающая состав функциональных блоков МК и логические связи между ними, приведена на рисунке 3.2. К основным функциональным блокам МК относятся: процессор, память программ, память данных, схема прерывания, таймер-счетчик, устройство ввода-вывода, схема управления и синхронизации.
В состав процессора входит счетчик команд, арифметическо-логическое устройство, триггер признака переноса, триггер признака вспомогательного переноса, аккумулятор, регистр слова состояния программы и триггеры битов условий (флагов). Каждой операции, которую может выполнять процессор, соответствует единственный байт, называемый кодом команды. Код команды считывается из ПЗУ по адресу, хранящемуся в счетчике команд, и запоминается в регистре команд.
Рисунок 3.2 - Структурная схема МК серии 80С
8-и разрядное арифметическо-логическое устройство (АЛУ) выполняет предусмотренные системой команд (раздел 4) операции над одним или двумя операндами, представленными в двоичном, а также в двоично-десятичном кодах. Основные операции, выполняемые АЛУ:
- арифметическое сложение, логическое сложение, логическое умножение, сложение по модулю 2, инвертирование;
- инкремент и декремент на единицу, сдвиг;
- перестановка полубайтов;
- десятичная коррекция.
В устройстве ввода-вывода МК серии 80С три 8-и разрядных порта Р0, Р1, Р2.
Порт Р0 — это 8-разрядный (D0 — D7) двунаправленный порт с тремя состояниями. Порты Р1, Р2 — квазидвунаправленные и имеют идентичные характеристики. Данные, записанные на них, статически фиксируются и не изменяются до перезаписи. Как входы эти порты входные данные не фиксируют, то есть входные данные должны присутствовать до считывания по команде приема данных. Слово «квази» связано с тем, что для использования портов Р1, Р2 в качестве входных сначала необходимо зафиксировать состояние «1» в этих портах. Структура квазидвунаправленных портов P1, P2 в сочетании с логическими командами обеспечивает возможность ввода и вывода бита данных через одну и ту же линию, выполнение логических операций, а также позволяет смешивать входные и выходные линии внутри одного порта.
Рисунок 3.3- Схема микроЭВМ
Три линии Т0, T1, INT служат входами, проверяемыми командами переходов. Линию Т0 можно использовать для выдачи тактовых сигналов, линию T1 — как вход счетчика внешних событий для таймера-счетчика, а линию INT —для внешнего аппаратурного прерывания.
Регистр служит для защёлки данных на входах ПЗУ, кода порт Р0 переходит в режим приёма информации.
При включении питания микроконтроллер не включается мгновенно, некоторый промежуток времени находится в бездейственном состоянии, до завершения переходных процессов в цепи питания. Этот промежуток времени должен быть не менее 10 мс. Для обеспечения данного условия необходимо сбросить микроконтроллер.
Сброс микроконтроллера осуществляется через вывод reset. В начальный момент времени весь ток потечет по цепи резистор, ёмкость, земля. Резистор интегрирован номиналом в 10 кОм.
В момент включения питания на выводе reset будет присутствовать низкий потенциал (микроконтроллер сбросится). Время заряда RC цепочки зависит от номинала ёмкости, зададимся номиналом ёмкости в 5 мкФ и произведём расчет.
(3.1)
Это время заряда удовлетворяет условию.
3.2 Разработка блока АЦП и ЦАП.
АЦП реализованы программно-аппаратным способом методом подбора через аналоговый мультиплексор двоично-весовых резисторов, образующих внутренний ЦАП, до момента сравнения на пороговом элементе входного напряжения и напряжения на выходе внутреннего ЦАП.
Примечание – ЦАП и АЦП выполнены с явно выраженными погрешностями, предназначенными для определения их с помощью измерительных приборов с невысокой точностью измерений.
Схему включения ЦАП и АЦП смотрите на листе ГОУ ОГУ 200400.1103.03 ЭЗ.
3.3 Разработка и расчет блока индикации
В качестве индикации можно применить различные световые или жидкокристаллические устройства отображения информации. В данном устройстве целесообразно применить светоизлучающие диоды в видимом диапазоне частот. Это позволит упростить (в отличии от остальных вариантов) схему подключения к устройству, установку и монтаж, позволяют наглядно отображать информацию.
Устройство управления световыми индикаторами необходимо подключить через усилитель тока. В качестве усилителя тока можно применить микросхемы К155ЛНЗ и ограничительные резисторы. К выходам усилителей тока подключить 8 светодиодов АЛ307БМ и восемь резисторов.
Резисторы включаются в цепь для ограничения прямого тока светодиодов. Так как по справочным данным максимально допустимый прямой ток равен Imax пр=20 мА и падение напряжения на p-n равно Uпр=2В, то из формулы 4.1 номиналы резисторов равны 150 Ом.
(3.2)
Рисунок 3.6 – Схема индикации
3.4 Разработка блока звуковой сигнализации
Устройство управления звуковой сигнализацией выполнено на микросхеме К155ЛНЗ, к выходу которой подключен пьезокерамический акустический излучатель ВА (ЗП-3).
Рисунок 3.7 – Схема звуковой сигнализации
3.5 Разработка блока стабилизатор напряжения
Для обеспечения питания микросхем в схему узла ИУВС введены стабилизатор СТ и преобразователь ПР напряжения.
Стабилизатор напряжения собран по параметрической схеме на микросхеме КР142ЕН5В. Он выдает напряжение +5В для питания микросхем при токе нагрузки до 0,5А. Схема стабилизатора приведена на рисунке 3.6.
Рисунок 3.8 – Схема стабилизатора напряжения
3.6 Разработка блока преобразователя напряжения
Преобразователь напряжения –12 В, необходимый для работы ПУ2, собран на транзисторном мультивибраторе и диодном выпрямителе. Он обеспечивает ток нагрузки до 40 мА. Для сглаживания пульсации и подавления импульсных помех в схему преобразователя включены конденсаторы. На рисунке 3.7 представлена схема преобразователя напряжения. Данная схема преобразователя хорошо отлажена и проверенна на радио электронных устройствах. Поэтому расчет и выбор элементов не выполняется.
Рисунок 3.9 - Схема преобразователя напряжения
4 Разработка системы команд и алгоритма программы.
4.1 Система макрокоманд управления узлом ИУВС
Одной из основных задач микроконтроллера является выполнение команд, выдаваемых со стороны управляющей ЭВМ. Это набор команд может достигать нескольких тысяч, и главная задача системных разработчиков – сделать эту систему команд прозрачной и систематизированной. Если эти требования будут выполнены, то система команд будет компактной и легко синтезируемой. Например, если число команд управления УСО будет насчитывать 256, то для синтеза команд этого набора достаточно одного байта, который позволит обеспечить число комбинаций 28=256. Чтобы не путать собственные (машинные) команды микроконтроллера с командами, выполняемыми модулем ИУВС со стороны управляющей ЭВМ, последние называются макрокомандами управления. В частности, для рассматриваемого в рамках данного раздела учебного стенда эта система макрокоманд выглядит следующим образом (таблица 4.1).
Таблица 4.1 – Синтез кодов макрокоманд управления УСО (1 байт)
|
Вид команды |
7 D6 |
5 D4 |
D3 D2 D1 D0 |
Приемник данных в УСО |
||||
|
Output: (Вывод данных в УСО) |
0 |
0 0 |
Выводимые данные в ЦАП или на световые индикаторы |
LED3....LED0 (индикаторы l3…l0) |
||||
|
0 1 |
LED7....LED4 (индикаторы l7…l4) |
|||||||
|
1 0 |
DAC1 (ЦАП1) |
|||||||
|
1 1 |
DAC2 (ЦАП2) |
|||||||
|
Вид команды |
7 D6 |
D5 D4 D3 |
D2 D1 D0 |
Источник данных в УСО |
||||
|
Input: (Вывод команды в УСО на передачу данных из источника УСО |
0 1 |
0 0 0 |
x x x (произвольные сотояния) |
ADC1 (АЦП1) |
||||
|
0 0 1 |
ADC2 (АЦП2) |
|||||||
|
0 1 0 |
ADC3 (АЦП3) |
|||||||
|
0 1 1 |
ADC4 (АЦП4) |
|||||||
|
1 0 0 |
Keys 3..0 (переключатели s3…s0) |
|||||||
|
1 0 1 |
Keys 7..4 (переключатели s7…s4) |
|||||||
|
1 1 x |
Not Defined (не реализовано) |
|||||||
After Input Command Send Data (Вид ответного байта данных на команду Input):
|
|
D7 D6 D5 D4 |
D3 D2 D1 D0 |
|
|||
|
|
0 0 0 0 |
D3 D2 D1 D0 (Данные из УСО) |
|
|||
|
Вид команды |
7 D6 |
D5 D4 D3 D2 D1 D0 |
Реакция УСО |
|||
|
Extended: (Спец. команды) |
1 х |
х х х х х 1 |
Send Code B6h (В ответ – байт В6) |
|||
|
х х х х 1 0 |
Beep (“бип”) |
|||||
|
х х х 1 0 0 |
Click (звуковой щелчок) |
|||||
|
х х 1 0 0 0 |
Reset (установка в исходное состояние) |
|||||
С точки зрения программного обеспечения микроЭВМ должно работать в двух режимах:
а) в режиме постоянного преобразования АЦП1-АЦП4 и опроса их выходов (для поддержания «горячего» режима);
б) в режиме прерывания – основном режиме работы модуля ИУС, обеспечивающем режим управления ввода-вывода между модулем ИУС и ПЭВМ.
4.2 Разработка подпрограммы постоянного преобразования АЦП1-АЦП4 и опроса их выходов
У данного типа микроконтроллера память организуется в виде двух банков. Выбор банка реализуется программным способом, для режима постоянного преобразования АЦП1-АЦП4 можно выбрать банк 0, для режима обработки прерывания банк 1.
Программа должна выполнить инициализацию микроконтроллера на выбранный режим работы. Так как программа постоянного преобразования должна иметь меньший приоритет, то прерывание по входу INT должно быть разрешено. Эта подпрограмма должна выводить на индикаторы информацию, для каждого светодиода отведена одна ячейка памяти. В соответствующую ячейку записывается информация, которая выводится на соответствующий индикатор. Далее необходимо вывести команду для управлением объектом. После чего происходит, последовательны опрос и преобразование АЦП. И формируется бит состояния оконечных датчиков. Блок схема алгоритма приведена на рисунке 4.1.
|
M[21…2B]:=0 |
|
EN1 |
|
HL3…HL1 M[22] HL 5…HL 4 M[21] HL 7…HL 6 M[25] |
|
ЦАП 1:=M[23] ЦАП 2:=M[24]
|
|
M[26] := АЦП 1 . . . M[29] := АЦП 4 |
|
Выбор S3…S0 M[2A] := S3…S0 |
|
Выбор S7…S4 M[2B] := S7…S4 |
Рисунок 4.1
4.3 Разработка алгоритма подпрограммы обработки прерывания
При поступлении на вход INT сигнала низкого уровня, происходит прерывание подпрограммы постоянного преобразования АЦП1-АЦП4 и опроса их выходов, и передаётся управление подпрограмме обработки прерывания.
Выбирается банк 1, запрещаются прерывания, сохранятся значение аккумулятора (для возвращения в подпрограмму), выполняется задержка.
Далее подпрограмма выполняет проверку сигнала на ложность. Для выяснения пришел стартовый бит или помеха? Если да, то микроконтроллер переходит в опрос входа INT с частотой 9200 Гц, таким образом при каждом последующем опросе будет считываться бит информации (начиная с младшего бита) записываться в регистр А в старший значащий разряд. При появлении следующего бита происходит сдвиг битов в регистре А в право (в сторону младшего разряда), досчитав до восьми опрос входа INT заканчивается. Таким образом происходит приём байта информации и сохранение в аккумулятор. Если сигнал ложный то происходит восстановление значения аккумулятора и управление передаётся подпрограмме постоянного преобразования АЦП1-АЦП4 и опроса их выходов.
После формирования байта анализируется его старший значащий разряд. Этот разряд указывает, на наличие какой либо ошибки работы устройства. Если его значение равно 1, то анализируется бит 0. Если бит 0 равен 1 то в ответ значение В6 и выйти из подпрограммы, если не равен единице, то проверяется первый бит. Если его значение равно 1 то подать непрерывный сигнал и остановить выполнение программы. Если значение бита 1 ровно 0 то проверяется второй бит. Если значение второго бита равно 1 то щелчок, если 0 то сброс микроЭВМ.
Если бит 7 равен 0 то проверяется бит 6 равен 1, то произвести логическое И значения байта аккумулятора с 38h, три раза произвести сдвиг и отправить в ответ значение ячейки адрес которой определяется как к значению аккумулятора прибавленное число двадцать шесть. Если бит 6 равен нулю, то проверяется бит 5. Если его значение равно единице, то проверяется бит 4. Если бит 4 равен 1, то отправить данные в ЦАП2. Если ноль, то в ЦАП1. И возврат в подпрограмму постоянного преобразования АЦП1-АЦП4 и опроса их выходов
Если значение бита 5 ровно 0 то проверяется бит 4, но обрабатывается другой подпрограммой. Если значение бита 4 ровно 1 то значение аккумулятора записать в ячейку управлением светодиодов HL1…HL3 и ячейку управлением светодиодами HL6…HL7. И возврат в подпрограмму постоянного преобразования АЦП1-АЦП4 и опроса их выходов.
|
Send Code M[A+26] |
|
M[21] A M[25] A |
|
INT |
|
SEL RBI DISI M[39]:=A |
|
Delay |
|
INT |
|
Receive |
|
A:=R7 |
|
R7,7
|
|
R7,0
|
|
Send Code #B6 |
|
R7,1
|
|
Deep |
|
R7,7
|
|
Send Code #B6 |
|
Deep |
|
R7,6
|
|
ANL A, #38 3RR A |
|
R7,5
|
|
R7,4
|
|
R7,4
|
|
M[22]:=A |
|
M[23]:=A |
|
M[24]:=A |
|
A:=M[39] SEL RB0 ENI |
|
Rietr |
Рисунок 4.2
ПРИЛОЖЕНИЕ А
(обязательное)
Шестнадцатеричный код программы
|
Поз. |
|
Изм. |
|
Лист |
|
№ докум. |
|
Подпись |
|
Дата |
|
Лист |
|
1 |
|
|
|
Разраб. |
|
|
|
Провер. |
|
|
|
Реценз. |
|
|
|
Н. Контр. |
|
|
|
Утверд. |
|
, |
|
Эмулятор ПЗУ Перечень элементов |
|
Лит. |
|
Листов |
|
1 |
|
|
|
Наименование |
|
Примечание |
|
Кол. |
|
Конденсаторы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K10-7в-П33-20пФ ±20% |
|
С1, С2 |
|
2 |
|
|
|
К50-16-25В-5 мкФ |
|
С3 |
|
1 |
|
|
|
|
|
С4, С5 |
|
1 |
|
|
|
K10-7в-П33-0,01 мкФ ±20% |
|
С7,С12,С14 |
|
3 |
|
|
|
K10-7в-П33-0.068 мкФ ±20% |
|
С8,С9,С10 |
|
3 |
|
|
|
К50-16-16В-30 мкФ |
|
С11,С13,С15 |
|
3 |
|
|
|
K10-7в-П33-0.033 мкФ ±20% |
|
С16 |
|
1 |
|
|
|
K10-7в-П33-0.001 мкФ ±20% |
|
С17 |
|
1 |
|
|
|
K10-7в-П33-0.033 мкФ ±20%
|
|
С18-С21 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
Микросхемы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КР142ЕН5В |
|
DA1 |
|
1 |
|
|
|
КМ1816ВЕ48 |
|
DD1 |
|
1 |
|
|
|
К155ЛН3 |
|
DD2,DD8 |
|
2 |
|
|
|
К589ИР12 |
|
DD3 |
|
1 |
|
|
|
К573РФ2 |
DD4 |
|
1 |
|
|
|
К554СА3 |
|
DD5 |
|
1 |
|
|
|
К564КП2 |
|
DD6 |
|
1 |
|
|
|
КМ580ВР43 |
|
DD7 |
|
1 |
|
|
|
К155ЛН3 |
|
DD9 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
Резисторы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МЛТ-0,125-51 кОМ ±5% |
|
R1-R11 |
|
11 |
|
|
|
СП3-120-47 кОМ ±5% |
|
R12,R13 |
|
2
|
|
|
|
|
|
|
|
|
|
|
|
Изм. |
|
Лист |
|
№ докум. |
|
Подпись |
|
Дата |
|
Лист |
|
|
|
Поз. |
|
Наименование |
|
Примечание |
|
Кол. |
|
МЛТ-0,125-6.2 кОМ ±5%
|
|
R14,R15 |
|
2 |
|
|
|
МЛТ-0,125-1 кОМ ±5%
|
|
R16 |
|
1 |
|
|
|
МЛТ-0,125-6.2 кОМ ±5%
|
|
R17,R32 |
|
2 |
|
|
|
МЛТ-0,125-100 ОМ ±5%
|
|
R18,R33 |
|
2 |
|
|
|
МЛТ-0,125-3.6 кОМ ±5%
|
|
R19,R23 |
|
2 |
|
|
|
МЛТ-0,125-10 кОМ ±5%
|
|
R20,R24 |
|
2 |
|
|
|
МЛТ-0,125-20 кОМ ±5%
|
|
R21,R25 |
|
2 |
|
|
|
МЛТ-0,125-30 кОМ ±5%
|
|
R22,R29 |
|
2 |
|
|
|
МЛТ-0,125-3.6 кОМ ±5%
|
|
R26 |
|
1 |
|
|
|
МЛТ-0,125-10 кОМ ±5%
|
|
R27 |
|
1 |
|
|
|
МЛТ-0,125-51 кОМ ±5% %
|
|
R28 |
|
1 |
|
|
|
МЛТ-0,125-30 кОМ ±5%
|
|
R30 |
|
|
|
|
|
МЛТ-0,125-100 ОМ ±5%
|
|
R31,R35 |
|
1 |
|
|
|
МЛТ-0,125-15 ОМ ±5%
|
R34 |
|
1 |
|
|
|
МЛТ-0,125-2.4 кОМ ±5%
|
|
R36-R38 |
|
3 |
|
|
|
МЛТ-0,125-51 ОМ ±5%
|
|
R39 |
|
1 |
|
|
|
МЛТ-0,125-200 ОМ ±5%
|
|
R40-R47 |
|
8 |
|
|
|
МЛТ-0,125-100 ОМ ±5%
|
|
R48 |
|
1 |
|
|
|
МЛТ-0,5-51 кОМ ±5%
|
R49-R53 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
Диоды |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КД522А |
|
VD1-VD12 |
|
12 |
|
|
|
АЛ336А |
|
VD13-VD21 |
|
8 |
|
|
|
|
|
|
|
|
|
|
|
Транзисторы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КТ503А |
|
VT1,VT3 |
|
2
|
|
|
|
Изм. |
|
Лист |
|
№ докум. |
|
Подпись |
|
Дата |
|
Лист |
|
|
|
Поз. |
|
Наименование |
|
Примечание |
|
Кол. |
|
КТ502А
|
|
VT2,VT4 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
Кварцевый резонатор
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РК170ББ-14БР-6 МГц
|
|
ZQ1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
Вилка СНО-53-8/28х9В-23
|
|
XT1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
%
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Схемы к дипломному проекту выполненные в программе sPlan
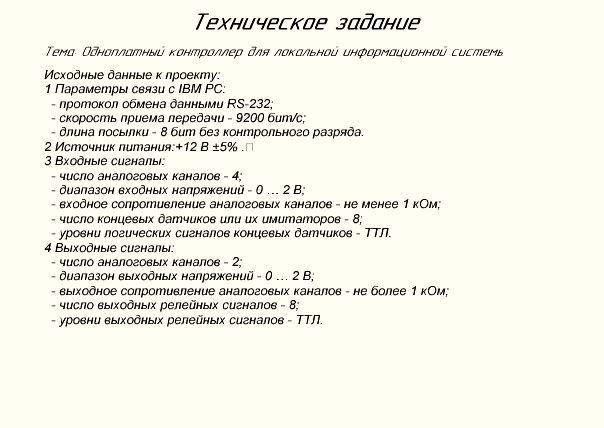
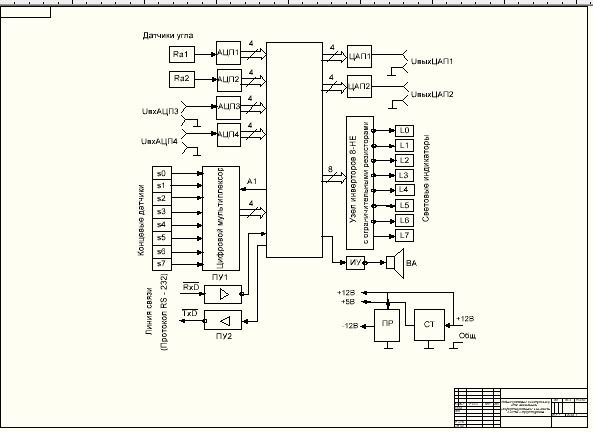
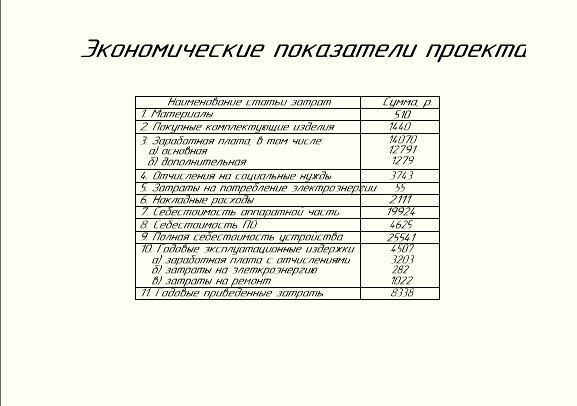

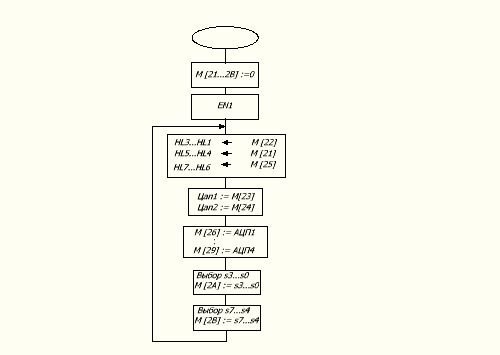


Скачать: