ДИПЛОМНЫЙ ПРОЕКТ
Разработка алгоритма и программы управления импульсным источником тока и напряжения
Аннотация
Пояснительная записка содержит 93 страницы, в том числе 22 рисунка и 23 таблицы. Графическая часть выполнена на 7 листах формата A1.
В процессе выполнения дипломного проекта была решена задача разработки алгоритма и программы управления импульсным источником тока и напряжения, полученное решение удовлетворяет поставленным требованиям технического задания.
Диплом содержит расчет экономической части, а также рассмотрены вопросы безопасности труда.
Summary
The explanatory note contains 93 pages, including 22 figures and 23 tables. The graphic part is executed on 7 sheets of format A1.
During fulfilment of the degree project the problem of modernization of a control system has been solved by the having device PUR 5/50, the received decision meets the put requirements of the technical report. The special attention is given to questions of construction of a control system on microcontroller ATmega16 of firm ATMEL.
The diploma contains account of an economic part of the designed system, safety issues of work also are considered.
Содержание
Введение. 6
- Обзор рынка аналогов. 6
1.2 Типовые схемы построения бесперебойных систем. 17
электропитания. 17
1.3 Полупроводниковые мосты, используемые в качестве выпрямителей. 21
1.4 Анализ микропроцессорных узлов АБП.. 26
1.5 Анализ силовых транзисторов, применяемых в преобразователях напряжения. 35
2 Разработка структурной схемы.. 44
2.1 Функции импульсного регулятора (ИР) напряжения и тока. 44
2.2 Разработка модели регулятора. 47
3 Разработка алгоритма и программы для МК.. 62
3.1 Разработка алгоритма. 62
3.2 Разработка программы.. 63
3.3 Отладка программы.. 81
4 Экономический расчёт проекта. 84
- Безопасность труда. 90
5.1 Анализ и обеспечение безопасных условий труда. 90
5.2 Расчет искусственного освещения. 96
5.3 Возможные чрезвычайные ситуации. 98
5.3.1 Расчет времени эвакуации сотрудников лаборатории при пожаре. 99
Список использованных источников. 105
Введение
Источники бесперебойного электропитания в настоящее время становятся неотъемлемой частью оборудования, что связано с достаточно низким качеством электроэнергии в государственных энергосетях. Невозможность получения «хорошей» электроэнергии из общей энергосистемы заставляет каждого потребителя индивидуально решать проблему качества электропитания за счет дополнительного оборудования, среди которого важное место занимают системы бесперебойного электропитания (СБП).
Современные системы БП представлены на рынке как шкафы управления оперативным током (ШОУТ). Шкафы управления оперативным током - современные сложные электротехнические устройства на новейшей унифицированной элементной базе с микропроцессорной системой управления. Предназначены для питания цепей постоянного тока различных потребителей установленным напряжением и непрерывного заряда аккумуляторных батарей с контролем их состояния. Применяются в системах постоянного тока электростанций и распределительных подстанций объектов электроэнергетики, на объектах нефтегазового, горнодобывающего, металлургического комплексов и промышленных предприятий других отраслей. Наличие микропроцессорной системы управление подразумевает разработку алгоритма работы системы и соответствующей программы. В данном проекте разработан алгоритм и программа для микроконтроллера ATMEGA8 фирмы ATMEL. Программа написана на языке С.
1. Обзор рынка аналогов
На отечественном рынке представлено множество подобных систем, выпускаемых как отечественными, так и импортными производителями. Рассмотрим некоторые из них.
1.1.1 Аппарат управления оперативным током (АУОТ), выпускаемый ЗАО «МПОТК «Технокомплект», г. Дубна. Применяется в системах гарантированного электроснабжения на объектах первой категории. АУОТ-20-220-УХЛ4 предназначен для непрерывного обеспечения потребителей стабилизированным постоянным напряжением стандарта 220 В. Конструктивно аппарат выполнен в виде шкафа настенного исполнения, с односторонним обслуживанием. Функционально АУОТ состоит из силовой части, включающей в себя два независимых силовых блока, платы датчиков и системы управления.
Силовая часть агрегата состоит из двух силовых блоков, преобразующих переменное трехфазное напряжение питающей сети в постоянное выходное напряжение от 150 до 250 В. Каждый силовой блок функционально состоит из низкочастотного трехфазного выпрямителя и сглаживающего фильтра, инвертора, трансформатора, RC-цепей, высокочастотного выпрямителя и ШИМ-контроллера.
1.1.2 Шкаф управления оперативным током ШУОТ-2405, выпускаемый ОАО «Завод «Инвертор», г. Оренбург. Шкаф предназначен для питания цепей постоянного тока напряжением 110, 220В в распределительных устройствах, системах аварийного питания, освещения, других потребителей в условиях эксплуатации УХЛ-4 по ГОСТ 15150. В стандартном исполнении в состав шкафа управления оперативным током входят:
- шкаф подзарядного устройства полупроводниковый (ПЗУ), состоящий из двух управляемых тиристорных выпрямителей (ПЗУ1 и ПЗУ2) с двумя микропроцессорными системами контроля и управления, осуществляющих питание нагрузки выпрямленным стабилизированным напряжением, а также заряд и подзаряд аккумуляторной батареи (АБ);
- шкаф аккумуляторный с комплектом аккумуляторных батарей, осуществляющих снижение пульсаций выпрямленного напряжения, компенсацию энергопотребления при пиковых нагрузках, превышающих мощность ПЗУ и, в случае перерывов в электроснабжении, обеспечение нагрузки электроэнергией.
Шкафы управления оперативным током серии 2405 выпускаются с номинальным выходным током 20, 30, 40, 50, 63, 70, 80, 90, 100А. ШУОТ изготавливаются с местным управлением, и обеспечивают дистанционный мониторинг текущих параметров (через интерфейс RS-485).
Шкафы управления оперативным током, как правило, комплектуются необслуживаемыми аккумуляторными батареями “Sonnenschein” (страна происхождения Германия) типа А512 со сроком службы до 7 лет, либо А412 со сроком службы 12-15 лет различной емкости. По требованию потребителя возможна комплектация стационарными свинцово–кислотными необслуживаемыми с рекомбинацией газа аккумуляторами других производителей и стран происхождения.
1.1.3 Шкаф управления оперативным током ШУОТ-2403, производимый ООО «Завод «Энергосистемы», г. Оренбург. Шкафы управления оперативным током 2403 с выходным напряжением от 48 В до 230 В и током до 63 А предназначены для питания оперативных цепей, систем аварийного питания и освещения, устройств связи и других потребителей, формовки аккумуляторных батарей.
ШУОТ допускают работу в следующих режимах:
- питание нагрузки при подключенной аккумуляторной батарее (АБ), когда входное напряжение подано на один ввод или на оба ввода одновременно;
- питание нагрузки энергией АБ, когда входное напряжение на обоих вводах отсутствует;
- питание нагрузки при отключенной АБ, когда входное напряжение подано на один из вводов или на оба ввода одновременно.
ШУОТ оснащены защитой АБ от глубокого разряда, отключающей нагрузку от АБ. Уставка срабатывания защиты регулируется. Также оснащены селективной защитой от коротких замыканий и перегрузок через отходящие фидеры
ШУОТ имеют следующие функции:
- автоматическое переключение на другой ввод при обесточивании основного ввода;
- заряд и подзаряд аккумуляторной батареи;
- стабилизацию тока для формовки аккумуляторной батареи (режим формовки АБ);
- защиту аккумуляторной батареи от глубокого разряда;
- защиту выпрямителя от перегрузок и коротких замыканий в нагрузке;
- контроль сопротивления изоляции на отходящих линиях;
- контроль обрыва фаз в системе управления выпрямителя;
- цифровую индикацию выходного напряжения и тока нагрузки;
- внешнюю сигнализацию основных режимов работы выпрямителя;
- автоматическое включение ВЗУ при восстановлении напряжения питающей сети после его исчезновения.
Конструктивно ШУОТ состоит из двух шкафов. Корпус ВЗУ и аккумуляторного шкафа может быть выполнен с опорой на регулируемые по высоте ножки.
ШУОТ серии 2403-2-3ХХХ предназначены для работы в режиме гарантированного обеспечения постоянного тока напряжением 48 В, 62 В, 115 В, 230 В в распределительных устройствах системах аварийного питания и освещения, средств связи и др. потребителей. ШУОТ имеет резервный силовой тиристорный модуль (СТМ), который с помощью системы автоматического управления (САУ), включается в работу при пробое одного или нескольких тиристоров в основном СТМ.
Переход на резерв осуществляется как в автоматическом, так и ручном режимах. При этом осуществляется остановка работы выпрямителя на 3-5 сек. с питанием нагрузки от АБ и последующий автоматический плавный запуск выпрямителя.
Рабочий режим на резервном СТМ выполняется без ограничения по времени эксплуатации, однако на пульт дежурного диспетчера передается сигнал о работе ШУОТа на резервном СТМ. При выходе из строя как основного, так и резервного СТМ САУ переводит ШУОТ в режим отключения. В этом состоянии мостовые выпрямители находятся в отключенном от силовых трансформаторов положении, с питанием нагрузки от АБ. Ввод в действие СТМ осуществляется после ремонта, сбросом защиты и выбора I СТМ в качестве работающего или же в автоматическом режиме (выключением и включением питания от I или II вводов изначально устанавливается I СТМ).
ШУОТ комплектуются необслуживаемыми герметичными аккумуляторными батареями производства фирмы «SONNENSCHEIN» (Германия) изготовленными по технологии драйфит А500 емкостью 65 А/ч (базовая комплектация). Емкость аккумуляторных батарей согласовывается с заказчиком.
1.1.4. Система управления оперативным током СОПТ, производимая компанией «ЭЛСИЭЛ», г. Москва. Основное назначение - бесперебойное электроснабжение ответственных потребителей постоянного тока (напряжение 230 В) в распределительных устройствах, системах аварийного питания и освещения и пр. Состав: два выпрямительных модуля (основной и резервный – взаимозаменяемые) и буферная аккумуляторная батарея (необслуживаемая). Функции выпрямительного модуля:
- гальваническая развязка между силовыми входом и выходом;
- стабилизация выходного напряжения и подзаряд батареи;
- автоматическая температурная коррекция уставки выходного напряжения;
- ограничение выходного тока;
- заряд батареи заданным током с последующим переходом в режим подзаряда;
- ручная регулировка уставок выходного напряжения, токоограничения и зарядного тока;
- селективное питание потребителей (12 фидеров);
- автоматическое повторное включение (АПВ) при восстановлении питающего напряжения;
- автоматическое отключение неисправного модуля с подключением резервного.
Особенности исполнения:
- цифровые системы управления модулями (взаимодействие и автономная работа, автоматический и ручной режимы);
- автоматический контроль исправности каналов связи между системами управления и первичными датчиками (токи, напряжения и температура);
- автоматический переход из режима стабилизации выходного напряжения в режим ограничения выходного (или зарядного) тока и наоборот;
- энергонезависимая память (для хранения уставок напряжения и тока подзарядки батареи);
- жидкокристаллический дисплей (настройка, контроль и индикация).
Контроль параметров:
- выходные токи и напряжения модулей;
- ток и напряжение батареи;
- сопротивление изоляции силовых цепей.
Индикация:
- обрыв фазы в питающей сети (основной или резервный вводы);
- работающие модули (один или оба);
- используемые отходящие фидеры.
Защитные функции:
- от коротких замыканий отходящих фидеров (селективно);
- от коротких замыканий в батарее;
- от интенсивного разряда батареи;
- от глубокого разряда батареи.
Конструктивные особенности:
- степень защиты IP 31;
- климатическое исполнение УХЛ4;
- одностороннее обслуживание;
- подвод кабелей (силовых и информационных) снизу.
1.1.5. Шкаф управления оперативным током производства компании «БЭМП» (г. С-Петербург) предназначен для обеспечения электроэнергией и защиты от перебоев электроснабжения оборудования, работающего на постоянном токе (220V DC), путем автоматического присоединения резервного источника питания – аккумуляторных батарей. Шкафы управления оперативным током выпускаются с номинальным выходным током 20, 25А.
Шкафы типа ШУОТ используются в системах электроснабжения на предприятиях промышленного и гражданского строительства, объектах связи и транспорта для обеспечения электроснабжения потребителей 1-й и 2-й категории.
Особенности конструкции ШУОТ:
- высокая перегрузочная способность: возможность кратковременно (до 2с) превышать максимальный ток нагрузки в 3 раза. Устройство надежно работает на индуктивную нагрузку, что особенно важно при коммутации высоковольтных контакторов и выключателей.
- срок службы не менее 15 лет. Устанавливаемые аккумуляторные батареи, являются необслуживаемыми на протяжении всего срока службы устройства. Контроллер аккумуляторных батарей обеспечивает работу в строгом соответствии с алгоритмами рекомендованными производителем АБ, что значительно продлевает срок их эксплуатации.
- ШУОТ и комплект аккумуляторных батарей компактно размещенных в одном шкафу. Емкости аккумуляторных батарей (33 А*ч) достаточно для питании ЗРУ в течение от 12 до 24 часов.
- устройство обеспечивает безынерционное переключение (без провалов напряжения) с основного режима на аккумуляторные батареи и обратно.
- питание ШУОТ осуществляется от источника с глухозаземлённой или изолированной нейтралью.
- удобный визуальный контроль основных показателей и режимов работы обеспечивается применением крупных, ярких светодиодных индикаторов
- схемы управления и индикации выполнены на PIC-контроллерах. Они обеспечивают не только управление силовой частью ШУОТ, но и сбор необходимой информации для вывода на индикаторы, в цепи сигнализации и т.п. Все основные сигналы предупредительной и аварийной сигнализации выведены как на светодиодные индикаторы, блинкеры так и на отдельный клеммник легко подключаются к цепям ЦС подстанции и к устройству передачи сигналов на вышестоящий уровень по каналам связи RS485 и Ethernet.
- автотест с циклом в 20 мин. проверяет сопротивление на клеммах АБ и заблаговременно предупредит о некачественном подключении.
- в устройстве реализованы различные защиты: от перенапряжения, перегрузки по току, КЗ на выходе, глубокого разряда аккумуляторных батарей, перегрева силовых элементов схемы и др.
- ШУОТ имеет высокий КПД (не менее 95%) и достаточно объёмный из алюминиевого сплава охлаждающий радиатор, практически не нуждается в принудительном охлаждении. Тем не менее, применена автоматическая двухступенчатая система принудительного охлаждения как радиатора, так и воздуха в шкафу, на случай работы на максимальной нагрузке и при повышенной температуре в помещении.
- автотест параметров питающей сети, контроль изоляции для предупредительной диагностики утечек тока, контроль положения выходных автоматических выключателей
1.1.6 Система оперативного тока СОТ-160-260-УХЛ4, производства ЗАО «МПОТК «Технокомплект», г. Дубна. предназначена для работы в системе бесперебойного питания оперативным током устройств релейной защиты и автоматики или аналогичных. Выходное напряжение определяется номинальным напряжением аккумуляторной батареи, режимом работы преобразователей и может находиться в пределах от 176 до 260 В. Суммарный выходной ток шины постоянного тока не более 160 А.
СОТ выполнена в виде шкафа конструктива "RITTAL" с двухсторонним обслуживанием, с вертикальной установкой и вводом для подключения внешних электрических цепей снизу. В нижней части шкафа, установлено разборное соединение для подключения защитного заземления. СОТ состоит из следующих основных устройств:
- двух преобразователей напряжения зарядно-подзарядных ПНЗП-80-260-УХЛ4-ЕВР;
- микропроцессорного терминала МикроСРЗ-193 для мониторинга сети постоянного тока, (в настоящее время вместо МикроСРЗ-193 возможна установка аналога ПКИ-07-УХЛ4 - разработка и производство ЗАО «МПОТК «Технокомплект»)
- двух коммутационно-распределительных секций.
Преобразователь обеспечивает выдачу сигнала «Авария» типа «сухой контакт»
Сигнал «Авария» формируется в случае:
- перегрева преобразователя;
- перегрева аккумуляторной батареи;
- при глубоком разряде аккумуляторной батареи;
- пониженного входного напряжения;
- повышенного входного напряжения;
- перекоса напряжений в силовом блоке;
- возникновения сигнала аварии транзисторов силового блока;
Преобразователь обеспечивает, в автоматических режимах работы, возможность корректировки тока заряда и подзарядного напряжения, в зависимости от температуры аккумуляторной батареи (опция)
Преобразователь, при перегрузке или коротком замыкании на выходе, переходит в режим стабилизации заданного значения тока, за счет снижения выходного напряжения.
При пропадании, или снижении напряжения питающей сети ниже допустимого уровня преобразователь выключается, а при восстановлении напряжения питающей сети автоматически включается с сохранением заданного режима работы.
При достижении температуры охладителя силового блока выше максимально допустимого порога преобразователь выключается
Преобразователь обеспечивает режимы работы для заряда аккумуляторных батарей:
- режим работы «Ручное управление» для заряда и подзаряда аккумуляторных батарей в буферном режиме с нагрузкой;
- автоматические методы «I», «UI» и «IUI заряда аккумуляторных батарей»;
- метод «Выравнивающий заряд», применяется после глубокого разряда или недостаточного заряда аккумуляторных батарей.
Преобразователь преобразует переменное трехфазное напряжение питающей сети 380В в постоянное выходное напряжение от 48 до 260В.
Преобразователь функционально состоит из низкочастотного трехфазного выпрямителя, сглаживающего фильтра, инвертора, трансформатора, выходного высокочастотного выпрямителя и LC фильтра.
Сетевое напряжение поступает на неуправляемый трехфазный выпрямитель, с выхода которого постоянное напряжение через сглаживающий LC-фильтр подается для питания инвертора. Инвертор выполнен по полумостовой схеме на основе интеллектуального IGBT-модуля фирмы Mitsubishi, что позволяет применить широтно-импульсную модуляцию с частотой около 12 кГц.
В качестве нагрузки в диагональ полумоста включена первичная обмотка трансформатора. Напряжение с вторичной обмотки выпрямляется диодами выходного выпрямителя и через выходной LC-фильтр поступает на нагрузку.
В IGBT-модуль встроен драйвер управления силовыми транзисторами, который выполняет следующие функции:
- формирование сигналов управления транзисторами верхнего и нижнего плечей;
- контроль тока и аппаратную защиту транзисторов;
- формирование сигнала токовой защиты;
- контроль температуры кристалла и температурную защиту.
Сигналы управления и защиты гальванически развязаны от системы управления схемой опторазвязок. Управление работой силовых транзисторов и контроль напряжения питания инвертора осуществляется платой управления. Все элементы силового блока размещены на охладителе, за исключением дросселей сглаживающих фильтров и трансформатора, которые конструктивно объединены в трансформаторно-реакторный блок.
Для охлаждения силового блока сбоку, на оребрении охладителя, установлены два вентилятора. Для охлаждения трансформаторно-реакторного блока на передней панели преобразователя дополнительно установлены два вентилятора
Система управления (СУ) состоит из следующих функциональных узлов:
- плата управления;
- плата индикации;
- плата датчиков;
- графический жидкокристаллический дисплей и клавиатура.
Алгоритм, программа работы, заданные параметры и протокол аварийных ситуаций преобразователя содержатся в микроконтроллере платы управления.
Схемы плат управления и индикации выполнены на основе микроконтроллеров семейства ATmega. Обмен данными между ними осуществляется по последовательному интерфейсу SPI, который организован по трем сигнальным проводам:
- SCK - тактовый сигнал;
- MOSI - сигнал передачи данных от платы управления к плате индикации;
- MISO - сигнал передачи данных от платы индикации к плате управления.
Работа системы управления происходит следующим образом:
Контроллер платы управления периодически, через фиксированные интервалы времени, производит измерение:
- UD1 – напряжение на конденсаторах верхнего плеча полумоста силового блока;
- UD2 – напряжение на конденсаторах нижнего плеча полумоста силового блока;
- UВЫХ – напряжение на выходе преобразователя (напряжение на аккумуляторной батарее);
- IВЫХ – ток на выходе преобразователя;
- контроль сигналов аварии с IGBT-модуля силового блока;
- выдачу импульсов управления на транзисторы силового блока;
- контроль температуры охладителя с выдачей сигнала управления вентиляторами;
- передачу и прием информации платы индикации;
- связь по интерфейсу RS-485 с прибором контроля температуры АБ;
- связь по интерфейсу RS-485 с управляющим компьютером верхнего уровня;
- протоколирование во внутренней энергонезависимой памяти аварийных ситуаций преобразователя.
По командам, поступающим с платы индикации, плата управления осуществляет включение, выключение, настройку параметров преобразователя, а также выдает по интерфейсу SPI на плату индикации информацию о текущем состоянии преобразователя и аварийных ситуациях. В случае возникновения аварийной ситуации на панели клавиатуры загорается светодиод "Авария" и формируется сигнал "Авария".
Выделим ряд наиболее важных параметров аналогов АБП и для удобства сведем их в таблицу 1.1.
Таблица 1.1 – Характеристики аналогов
Параметры |
ЗАО МПОТК «Технокомплект» (ШОУТ) |
ОАО «Завод «Инвертор» |
ООО Завод «Энергосистемы» |
Компания «ЭЛСИЭЛ» |
Компании «БЭМП» |
ЗАО МПОТК «Технокомплект» (СОТ) |
|
Входные параметры |
||||||
|
Напряжение питающей сети (линейное) трёхфазное, В |
380 |
220...660 |
220, 380 |
380 |
380 |
323-418 |
|
Колебания входного напряжения, % |
+10…-30 |
±10 |
+10…-15 |
+10…-15 |
+10…-15 |
+10…-15 |
|
Частота, Гц |
50…60 |
50 |
50 |
50 |
48-60 |
49-60 |
|
Колебания частоты, % |
±2 |
±5 |
±5 |
- |
- |
±2 |
|
Коэффициент полезного действия, % |
95 |
>87 |
90 |
³ 85 |
³ 95 |
³ 95 |
|
Выходные параметры |
||||||
|
Напряжение постоянного тока (регулируемое), В |
150…250 |
180…240 |
180…256 |
223…247 |
230 |
48-260 |
|
Номинальный ток, А |
1…40 |
20…100 |
20…125 |
20…100 |
20 |
1…80 |
Продолжение таблицы 1.1
Параметры |
ЗАО МПОТК «Технокомплект» (ШОУТ) |
ОАО Завод «Инвертор» |
ООО Завод «Энергосистемы» |
Компания «ЭЛСИЭЛ» |
Компании «БЭМП» |
ЗАО МПОТК «Технокомплект» (СОТ) |
|
Количество и распределение отходящих линий |
12 (3х6,3А; 3х10А; 3х16А) 3х25А |
12 (4х6,3А; 4х10А; 4х16А) |
до 10 двухполюсных линий |
12 (4х6,3А; 4х10А; 4х16А) |
12 (3х6А; 3х10А; 3х16А) 3х25А |
2 (2х80А) |
|
Точность стабилизации напряжения, % |
0,5 |
±0,5 |
0,3 |
±1 |
0.3 |
±1 |
|
Параметры АКБ |
||||||
|
Ёмкость, A/ч |
65…85 |
55… 280 |
65…85 |
65…85 |
30 |
65…85 |
|
Срок службы, лет |
³15 |
6… 15 |
- |
- |
³15 |
³15 |
|
Особенности конструкции |
шкафы |
шкафы |
шкафы |
шкафы |
шкафы |
Шкафы |
|
Тип аккумуляторов |
Sonnenschein, A500, и им подобные |
AGM, Gel |
Sonnenschein, A500, и им подобные |
Sonnenschein, A500, и им подобные |
Sonnenschein, A500, и им подобные |
Sonnenschein, A500, и им подобные |
1.2 Типовые схемы построения бесперебойных систем
электропитания
В зависимости от состава оборудования ЭПУ и способа эксплуатации аккумуляторных батарей системы электропитания классифицируются следующим образом:
- буферная система электропитания с несекционированной аккумуляторной батареей, подключенной во всех режимах к цепи питания нагрузки, и вольтодобавочными преобразователями постоянного напряжения для стабилизации напряжения на выходе ЭПУ или без преобразователей;
- буферная система электропитания с секционированной аккумуляторной батареей, подключенной во всех режимах к цепи питания нагрузки;
- двухлучевая безаккумуляторная;
- система электропитания с отделенной от нагрузки аккумуляторной батареей с преобразователями постоянного напряжения для стабилизации напряжения на выходе ЭПУ или без преобразователей.
Буферная система включает выпрямители и аккумуляторные батареи АБ. При перерывах в электроснабжении питание осуществляется от АБ, а в нормальном режиме, при питании от сети через выпрямитель одновременно происходит подзаряд АБ. Существует несколько вариантов построения буферной системы.
1.2.1 Буферная система с несекционированной аккумуляторной батареей, подключенной во всех режимах к цепи питания нагрузки. Схема самого простого варианта, не содержащего преобразователей, приведена на рисунке 1.1.
Рисунок 1.1 – Буферная система с несекционированной аккумуляторной батареей, не содержащая преобразователи
Эта схема характеризуется большими изменениями выходного напряжения.
Другой вариант этой системы предполагает относительно простое регулирование выходного напряжения путем коммутации групп кремниевых вентилей НЭ. Ее схема представлена на рисунке 1.2. При нормальном электроснабжении напряжения БВ и АБ требуется поддерживать на более высоком уровне, поэтому он также применяется при относительно небольшой мощности (до 100А). Недостатком является ступенчатое регулирование.
Контакторы К1 и К2 управляются устройством контроля напряжения.
Рисунок 1.2 – Схема с регулированием выходного напряжения путем коммутации групп кремниевых вентилей
В современных системах, отклонение напряжения не должно превышать +10…-6% при пульсациях не более 2 мВ. Для этого применяются вольтодобавочные конверторы (ВДК).
Возможен пассивный и активный режим работы ВДК. В пассивном включении ВДК отключен в нормальном режиме УК, а его выход шунтирован диодной сборкой VD. При отсутствии электроснабжения ВДК автоматически включается и компенсирует снижение напряжения АБ. Схема с применением ВДК, приведена на рисунке 1.3.
Рисунок 1.3 – Схема с ВДК
В активном включении ВДК постоянно включен в цепь нагрузки. УК и VD не нужны. Это повышает качество электроэнергии при изменениях режима работы, но КПД такой ЭПУ ниже.
1.2.2 Буферная система с секционированной аккумуляторной батареей. Если допускается изменение питающего напряжения на 10%, применяется регулирование коммутацией групп дополнительных элементов ДЭ. Схема буферной системы с коммутацией ДЭ состоит из буферного выпрямителя БВ, выпрямителя содержания ВС, АБ (основной и дополнительной ДЭ), устройства коммутации УК, и представлена на рисунке 1.4. По мере разряда АБ УК подключает ДЭ. Подзаряд ДЭ осуществляется от ВС, а АБ - от БВ. Эта система широко применяется как у нас, так и в других странах для питания аппаратуры городских АТС, МТС, АМТС, в установках прямых соединений телеграфных станций. Достоинство - высокий КПД, недостаток - ступенчатое регулирование.
Рисунок 1.4 - Буферная система с секционированной аккумуляторной батареей
1.2.3 Выпрямительные устройства тиристорные. В них используется тиристорный трехфазный управляемый выпрямитель по мостовой схеме (схеме Ларионова). Стабилизация осуществляется за счет изменения угла открывания тиристоров. Данные схемы имеют быстродействующую защиту от перегрузок.
На рисунке 1.5 приведена схема тиристорного трехфазного управляемого выпрямителя.
Рисунок 1.5 - Тиристорный трехфазный управляемый выпрямитель по схеме моста Ларионова
1.2.4 Системы на основе управляемого однофазного тиристорного выпрямителя (мост, с двумя тиристорами и двумя диодами). Стабилизация осуществляется за счет автоматического изменения угла открывания тиристоров. Схема такой системы приведена на рисунке 1.6.
Рисунок 1.6 - Управляемый однофазный тиристорный выпрямитель
В нее входят фильтр радиопомех ФРП, трансформатор, вентильная группа, импульсный стабилизатор напряжения ИСН, сглаживающий фильтр СФ, схема управления СУ.
1.2.5 Система электропитания с отделенной от нагрузки резервной АБ изображена на рисунке 1.7
Резервная АБ отделяется от нагрузки при нормальной работе тиристором. АБ подзаряжается от ЗВ.
Рисунок 1.7 - Система электропитания с отделенной от нагрузки резервной АБ
В аварийном режиме тиристор подключает АБ к нагрузке. Послеаварийный заряд АБ осуществляется при ее отключении от нагрузки, поэтому не требуется регулировать Uвых. Пределы изменения Uвых велики. Пределы изменения Uвых можно уменьшить, если ввести ВДК. Причем ВДК может подключаться к нагрузке как в аварийном режиме (ненагруженный ВДК), так и постоянно (системы off-line и on-line).
Недостатком систем с отделенной от нагрузки резервной АБ является то, что она предъявляет более жесткие требования к динамическим характеристикам ВУ, так как АБ не может выполнять функции сглаживающего фильтра.
Другим недостатком является большее потребление электроэнергии.
Достоинство - более высокое качество электроэнергии по сравнению с другими системами электропитания.
1.3 Полупроводниковые мосты, используемые в качестве выпрямителей
Наиболее распространены трёхфазный выпрямитель по схеме Миткевича В.Ф. (на трёх диодах), предложенный им в 1901 г., и трёхфазный выпрямитель по схеме Ларионова А.Н. (на шести диодах), предложенный им в 1923 г.
Менее известны трёхфазные выпрямители по схемам «три параллельных моста» (на двенадцати диодах), «три последовательных моста» (на двенадцати диодах) и др., которые по многим параметрам превосходят и схему Миткевича и схему Ларионова. При этом требуются диоды со средним током через один диод почти вдвое меньшим, чем в схеме Ларионова.
Следует отметить, что выпрямитель Миткевича является четвертьмостовым параллельным, выпрямитель Ларионова является не полномостовым, как его часто считают, а полумостовым параллельным («три параллельных полумоста»). В зависимости от схемы включения трёхфазного трансформатора или трёхфазного генератора (звезда, треугольник) схема Ларионова имеет две разновидности: «звезда-Ларионов» и «треугольник-Ларионов», которые имеют разные напряжения, токи, внутренние сопротивления.
По схемам можно заметить, что схема Миткевича является недостроенной схемой Ларионова, а схема Ларионова является недостроенной схемой «три параллельных моста».
1.3.1 Три полумоста параллельно, объединённые кольцом (треугольником) («треугольник-Ларионова»).
В некоторой электротехнической литературе иногда не различают схемы «треугольник-Ларионова» и «звезда-Ларионова», которые имеют разные значения среднего выпрямленного напряжения, максимального тока, эквивалентного активного внутреннего сопротивления и др. В выпрямителе "треугольник-Ларионова" потери в меди больше, чем в выпрямителе "звезда-Ларионова", поэтому на практике чаще применяется схема "звезда-Ларионов". Схема треугольника-Ларионова приведена на рисунке 1.8.
Рисунок 1.8 - Схема треугольника-Ларионова
На рисунке 1.9 представлена ЭДС на входе (точками) и на выходе (сплошной).
Рисунок 1.9 - ЭДС на входе и на выходе
Выпрямители Ларионова А. Н. являются полумостовыми параллельными. Площадь под интегральной кривой равна:
(1.1)
Средняя ЭДС равна:
(1.2)
где - эффективное (действующее) значение ЭДС вторичной обмотки трансформатора, а
- средняя ЭДС
В работе схемы «треугольник-Ларионов» есть два периода. Большой период равен 360° (). Малый период равен 60° (π/3), и повторяется внутри большого 6 раз. Малый период состоит из двух малых полупериодов по (π/6), которые зеркально симметричны и поэтому достаточно разобрать работу схемы на одном малом полупериоде в 30°.
На холостом ходу и в режимах близких к нему ЭДС в ветви с наибольшей на данном отрезке периода обратносмещает (закрывает) диоды с меньшими на данном отрезке периода ЭДС.
В начальный момент () ЭДС в одной из ветвей равна нулю, а ЭДС в двух других ветвях равны 0,86·Em, при этом открыты два верхних диода и один нижний диод. Эквивалентная схема представляет собой две параллельные ветви с одинаковыми ЭДС (0,86) и одинаковыми сопротивлениями по 3·r каждое, эквивалентное сопротивление обеих ветвей равно 3·r/2. Далее, на малом полупериоде, одна из двух ЭДС, равных 0,86, растёт до 1,0, другая уменьшается до 0,5, а третья растёт от 0,0 до 0,5. Один из двух открытых верхних диодов закрывается, и эквивалентная схема является параллельным включением двух ветвей, в одной из которых большая ЭДС и её сопротивление равно 3·r, в другой ветви образуется последовательное включение двух меньших ЭДС, и её сопротивление равно 2·3·r=6·r, эквивалентное сопротивление обеих ветвей равно:
. (1.3)
Частота пульсаций равна 6 · f, где f — частота сети. Абсолютная амплитуда пульсаций равна:
. (1.4)
Относительная амплитуда пульсаций равна:
Аро = 0,13/0,95 = 0,14. (1.5)
1.3.2 Три полумоста параллельно, объединённые звездой («звезда-Ларионова»)
Выпрямитель звезда-Ларионов (шестипульсный) применяется в генераторах электроснабжения бортовой сети почти на всех средствах транспорта. Схема приведена на рисунке 1.10.
Рисунок 1.10 - Схема звезды-Ларионова
На рисунке 1.11 представлена ЭДС на входе (точками) и на выходе (сплошной).
Рисунок 1.11 - ЭДС на входе и на выходе
Площадь под интегральной кривой равна:
(1.6)
Средняя ЭДС равна:
. (1.7)
То есть в раз больше, чем в схемах «треугольник-Ларионов» и «три параллельных полных моста».
В этом выпрямителе есть большой период равный 360° и малый период, равный 60°. В большом периоде помещаются 6 малых периодов. Малый период в 60° состоит из двух зеркальносимметричных частей по 30°, поэтому для описания работы этой схемы достаточно разобрать её работу на одной части в 30° малого периода. В начале малого периода (ω · t=0) ЭДС в одной из ветвей равна нулю, в двух других — по 0,86·Em. Эти две ветви включены последовательно. Эквивалентное внутреннее активное сопротивление при этом равно 6·r Далее, одна из ЭДС. увеличивается от 0,86 до 1,0, другая уменьшается от 0,86 до 0,5, а третья растёт от 0,0 до 0,5. Эквивалентная схема при этом представляет собой две последовательно включенные ветви, в одной из которых одна ЭДС и её сопротивление равно сопротивлению одной обмотки 3·r, в другой две параллельно включенные ЭДС с сопротивлением 3· r каждая, эквивалентное сопротивление двух параллельных ветвей равно 3· r/2. Эквивалентное активное внутреннее сопротивление всей цепи равно:
(1.8)
В режимах близких к холостому ходу (при малых нагрузках) в параллельных ветвях э.д.с. в ветви с большей э.д.с. обратносмещает (закрывает) диод в ветви с меньшей э.д.с., при этом изменяется эквивалентная схема. При увеличении нагрузки появляются и увеличиваются отрезки периода на которых обе ветви работают на нагрузку параллельно. В режиме короткого замыкания отрезки параллельной работы увеличиваются до длины всего периода, но полезная мощность в этом режиме равна нулю.
Частота пульсаций равна 6 · f, где f — частота сети. Абсолютная амплитуда пульсаций равна:
. (1.9)
Относительная амплитуда пульсаций равна:
Аро = 0,23/1,65=0,14. (1.10)
1.3.3. Три двухфазных двухчетвертьмостовых параллельных выпрямителей Миткевича параллельно (6 диодов). Является почти аналогом выпрямителя «три полных моста параллельно» и имеет почти такие же свойства, как и выпрямитель «три полных моста параллельно», но эквивалентное внутреннее активное сопротивление почти вдвое больше, число диодов вдвое меньше, средний ток через один диод почти вдвое больший. Схема представлена на рисунке 1.12.
Рисунок 1.12 – Три двухфазных двухчетвертьмостовых параллельных выпрямителей Миткевича параллельно
Площадь под интегральной кривой равна:
. (1.11)
Средняя ЭДС равна:
. (1.12)
То есть такая же, как и в схеме «треугольник-Ларионов» и в раз меньше, чем в схеме «звезда-Ларионов».
1.3.4. Три двухфазных двухчетвертьмостовых параллельных выпрямителей Миткевича последовательно (6 диодов). Является почти аналогом выпрямителя «три полных моста последовательно» и имеет почти такие же свойства, но эквивалентное внутреннее активное сопротивление почти вдвое больше, число диодов вдвое меньше, средний ток через один диод почти вдвое больше.
1.4 Анализ микропроцессорных узлов АБП
В процессе миниатюризации функциональные блоки, которые в обычных компьютерных системах размещались в отдельных интегральных схемах (процессор, память, порты ввода \ вывода, таймеры, контроллеры прерываний и пр.) стали объединять на одном кристалле. Так появились микроконтроллеры или, как их принято называть в отечественной литературе, однокристальные ЭВМ. Такой подход позволил значительно сократить не только размеры встроенных систем, но также сложность и сроки их разработки, а следовательно и стоимость. Сокращение числа компонентов повлекло за собой повышение надежности готовых устройств. В некоторых случаях для построения полноценной встроенной системы достаточно одной микросхемы – микроконтроллера.
Основные требования, которые потребители предъявляют к управляющим блокам приборов (микроконтроллерам) можно сформулировать следующим образом:
- низкая стоимость;
- высокая надежность;
- высокая степень миниатюризации;
- малое энергопотребление;
- работоспособность в жестких условиях эксплуатации;
- достаточная производительность для выполнения всех требуемых функций.
В отличие от универсальных компьютеров к управляющим контроллерам, как правило, не предъявляются высокие требования к производительности и программной совместимости.
Выполнение всех этих довольно противоречивых условий одновременно затруднительно, поэтому развитие и совершенствование техники пошло по пути специализации и в настоящее время количество различных моделей управляющих микроконтроллеров чрезвычайно велико.
1.4.1 Классификация и структура микроконтроллеров. В настоящее время выпускается целый ряд типов МК. Все эти приборы можно условно разделить на три основных класса:
- 8-разрядные МК для встраиваемых приложений;
- 16- и 32-разрядные МК;
- цифровые сигнальные процессоры (DSP).
Наиболее распространенным представителем семейства МК являются 8-разрядные приборы, широко используемые в промышленности, бытовой и компьютерной технике. Они прошли в своем развитии путь от простейших приборов с относительно слаборазвитой периферией до современных многофункциональных контроллеров, обеспечивающих реализацию сложных алгоритмов управления в реальном масштабе времени. Причиной жизнеспособности 8-разрядных МК является использование их для управления реальными объектами, где применяются, в основном, алгоритмы с преобладанием логических операций, скорость обработки которых практически не зависит от разрядности процессора.
Росту популярности 8-разрядных МК способствует постоянное расширение номенклатуры изделий, выпускаемых такими известными фирмами, как Motorola, Microchip, Intel, Zilog, Atmel и многими другими. Современные 8-разрядные МК обладают, как правило, рядом отличительных признаков. Перечислим основные из них:
- модульная организация, при которой на базе одного процессорного ядра (центрального процессора) проектируется ряд (линейка) МК, различающихся объемом и типом памяти программ, объемом памяти данных, набором периферийных модулей, частотой синхронизации;
- использование закрытой архитектуры МК, которая характеризуется отсутствием линий магистралей адреса и данных на выводах корпуса МК. Таким образом, МК представляет собой законченную систему обработки данных, наращивание возможностей которой с использованием параллельных магистралей адреса и данных не предполагается;
- использование типовых функциональных периферийных модулей (таймеры, процессоры событий, контроллеры последовательных интерфейсов, аналого-цифровые преобразователи и др.), имеющих незначительные отличия в алгоритмах работы в МК различных производителей;
- расширение числа режимов работы периферийных модулей, которые задаются в процессе инициализации регистров специальных функций МК.
При модульном принципе построения все МК одного семейства содержат процессорное ядро, одинаковое для всех МК данного семейства, и изменяемый функциональный блок, который отличает МК разных моделей. Структура модульного МК приведена на рисунке 1.13.
Рисунок 1.13 - Модульная организация микроконтроллера.
Процессорное ядро включает в себя:
- центральный процессор;
- внутреннюю контроллерную магистраль (ВКМ) в составе шин адреса, данных и управления;
- схему синхронизации МК;
- схему управления режимами работы МК, включая поддержку режимов пониженного энергопотребления, начального запуска (сброса) и т.д.
Изменяемый функциональный блок включает в себя модули памяти различного типа и объема, порты ввода/вывода, модули тактовых генераторов (Г), таймеры. В относительно простых МК модуль обработки прерываний входит в состав процессорного ядра. В более сложных МК он представляет собой отдельный модуль с развитыми возможностями. В состав изменяемого функционального блока могут входить и такие дополнительные модули как компараторы напряжения, аналого-цифровые преобразователи (АЦП) и другие. Каждый модуль проектируется для работы в составе МК с учетом протокола ВКМ. Данный подход позволяет создавать разнообразные по структуре МК в пределах одного семейства.
1.4.2 Процессорное ядро микроконтроллера. Основными характеристиками, определяющими производительность процессорного ядра МК, являются:
- набор регистров для хранения промежуточных данных;
- система команд процессора;
- способы адресации операндов в пространстве памяти;
- организация процессов выборки и исполнения команды.
С точки зрения системы команд и способов адресации операндов процессорное ядро современных 8-разрядных МК реализует один из двух принципов построения процессоров:
- процессоры с CISC-архитектурой, реализующие так называемую полную систему команд (Complicated Instruction Set Computer);
- процессоры с RISC-архитектурой, реализующие сокращенную систему команд (Reduced Instruction Set Computer).
CISC-процессоры выполняют большой набор команд с развитыми возможностями адресации, давая разработчику возможность выбрать наиболее подходящую команду для выполнения необходимой операции. В применении к 8-разрядным МК процессор с CISC-архитектурой может иметь однобайтовый, двухбайтовый и трехбайтовый (редко четырехбайтовый) формат команд. Время выполнения команды может составлять от 1 до 12 циклов. К МК с CISC-архитектурой относятся МК фирмы Intel с ядром MCS-51, которые поддерживаются в настоящее время целым рядом производителей, МК семейств НС05, НС08 и НС11 фирмы Motorola и ряд других.
В процессорах с RISC-архитектурой набор исполняемых команд сокращен до минимума. Для реализации более сложных операций приходится комбинировать команды. При этом все команды имеют формат фиксированной длины (например, 12, 14 или 16 бит), выборка команды из памяти и ее исполнение осуществляется за один цикл (такт) синхронизации. Система команд RISC-процессора предполагает возможность равноправного использования всех регистров процессора. Это обеспечивает дополнительную гибкость при выполнении ряда операций. К МК с RISC-процессором относятся МК AVR фирмы Atmel, МК PIC16 и PIC17 фирмы Microchip и другие.
На первый взгляд, МК с RISC-процессором должны иметь более высокую производительность по сравнению с CISC МК при одной и той же тактовой частоте внутренней магистрали. Однако на практике вопрос о производительности более сложен и неоднозначен.
С точки зрения организации процессов выборки и исполнения команды в современных 8-разрядных МК применяется одна из двух уже упоминавшихся архитектур МПС: фон-неймановская (принстонская) или гарвардская.
Основной особенностью фон-неймановской архитектуры является использование общей памяти для хранения программ и данных, как показано на рисунке 1.14.
Рисунок 1.14 - Структура МПС с фон-неймановской архитектурой.
Основное преимущество архитектуры Фон-Неймана – упрощение устройства МПС, так как реализуется обращение только к одной общей памяти. Кроме того, использование единой области памяти позволяло оперативно перераспределять ресурсы между областями программ и данных, что существенно повышало гибкость МПС с точки зрения разработчика программного обеспечения. Размещение стека в общей памяти облегчало доступ к его содержимому. Неслучайно поэтому фон-неймановская архитектура стала основной архитектурой универсальных компьютеров, включая персональные компьютеры.
Основной особенностью гарвардской архитектуры является использование раздельных адресных пространств для хранения команд и данных, как показано на рисунке 1.15.
Рисунок 1.15 - Структура МПС с гарвардской архитектурой.
Гарвардская архитектура почти не использовалась до конца 70-х годов, пока производители МК не поняли, что она дает определенные преимущества разработчикам автономных систем управления.
Судя по опыту использования МПС для управления различными объектами, для реализации большинства алгоритмов управления такие преимущества фон-неймановской архитектуры как гибкость и универсальность не имеют большого значения. Анализ реальных программ управления показал, что необходимый объем памяти данных МК, используемый для хранения промежуточных результатов, как правило, на порядок меньше требуемого объема памяти программ. В этих условиях использование единого адресного пространства приводило к увеличению формата команд за счет увеличения числа разрядов для адресации операндов. Применение отдельной небольшой по объему памяти данных способствовало сокращению длины команд и ускорению поиска информации в памяти данных.
Кроме того, гарвардская архитектура обеспечивает потенциально более высокую скорость выполнения программы по сравнению с фон-неймановской за счет возможности реализации параллельных операций. Выборка следующей команды может происходить одновременно с выполнением предыдущей, и нет необходимости останавливать процессор на время выборки команды. Этот метод реализации операций позволяет обеспечивать выполнение различных команд за одинаковое число тактов, что дает возможность более просто определить время выполнения циклов и критичных участков программы.
Большинство производителей современных 8-разрядных МК используют гарвардскую архитектуру. Однако гарвардская архитектура является недостаточно гибкой для реализации некоторых программных процедур. Поэтому сравнение МК, выполненных по разным архитектурам, следует проводить применительно к конкретному приложению.
В настоящее время наиболее яркими представителями микроконтроллеров СISC и RISC, имеющих соответственно фон-неймановскую и гарвардскую архитектуры являются микроконтроллеры i8051 и AVR – микроконтроллеры фирмы Atmel, а таккже PIC – микроконтроллеры
1.4.3 Специфика решаемых задач не предполагает сколько-нибудь сложной арифметической обработки данных. Поэтому целесообразно использовать МК на основе 8-разрядного процессорного ядра.
На сегодняшний день широкий модельный ряд 8-разрядных МК с различными наборами периферийных модулей представлен продукцией Atmel и Microchip. Сравнительные характеристики некоторых микроконтроллеров Atmel и Microchip приведены в таблицах 1.2 и 1.3 соответственно.
Таблица 1.2 - Характеристики микроконтроллеров Atmega8 и Atmega16
|
Параметр |
Atmega8 |
Atmega16 |
|
|
1 |
2 |
3 |
|
|
Тактовая частота |
16МГц |
16МГц |
|
|
FLASH память программ |
8К |
16К |
|
|
Память данных (байт) |
512 |
1К |
|
|
EEPROM память данных (байт) |
512 |
512 |
|
|
Порты ввода/вывода |
Порты A, B, C, D |
Порты A, B, C, D |
|
|
Таймеры |
3 |
3 |
|
|
Модуль захват/сравнение/ШИМ |
3 |
6 |
|
|
Модули последовательного интерфейса |
SPI, USART, IIC |
SPI, USART, IIC |
|
|
Модуль 10-разрядного АЦП |
8 каналов |
8 каналов |
|
|
Инструкций |
130 |
131 |
|
Таблица 1.3 – Характеристики микроконтроллеров семейства PIC16F87x
При сравнении видно, что в микроконтроллеры фирмы Atmel имеют большее количество инструкций. Чем больше инструкций «понимает» процессор, тем меньше получается размер программы, а, следовательно, экономится память программ и увеличивается быстродействие. Также следует учесть, что производительность зависит от выполняемой программы. В данной системе управления необходимо выполнять арифметические операции, в том числе умножение. Семейство AVR Mega и PIC18 обладают вышеописанными инструкциями, включая и команду аппаратного умножения двух восьмибитных чисел, что существенно может сократить и время выполнения программы, и размер ее кода. По размеру ОЗУ и памяти программ и PIC и AVR идут на одном уровне. Тоже самое можно сказать про различные средства отладки. Программные средства разработок - MPLAB для PIC и AVRStudio для AVR позволяют разрабатывать программное обеспечение на языке ассемблера, а также вести отладку в различных режимах не только программ, написанных на языке ассемблера, но и на Си. И MPLAB, и AVRStudio распространяются бесплатно. Так же имеются различные Си компиляторы, для PIC это в основном платные, примером может служить CCS – PICC, для AVR встречаются как платные, так и свободно распространяемые. К платным относится известный компилятор CVAVR, к бесплатным – WinAVR. Различные схемные эмуляторы позволяют облегчить задачу комплексной отладки (например MPLAB ICD для PIC и JTAG ICE для AVR).
Рассмотрим быстродействие PIC и AVR. Входная тактовая частота у PIC делится на 4, у AVR нет внутреннего делителя, поэтому, при максимальной тактовой частоте PIC контроллеров 20 МГц, его реальная производительность будет достигать 5.106 операций в секунду, в то время как при максимальной тактовой частоте AVR контроллеров 16 МГц его производительность может достигнуть 16.106 операций в секунду. В микроконтроллерах AVR имеется возможность использовать векторную систему прерываний.
Таким образом, из всего вышесказанного можно сделать вывод, что микроконтроллеры фирмы ATMEL семейства MEGA наиболее предпочтительны.
Микроконтроллеры этого семейства являются 8-разрядными микроконтроллерами, предназначенными для встраиваемых приложений. Микроконтроллеры изготавливаются по малогабаритной КМОП-технологии, которая в сочетании с усовершенствованной RISC-архитектурой позволяет достичь наилучшего соотношения показателей быстродействие / энергопотребление. Благодаря тому, что подавляющее большинство команд выполняется за один такт, быстродействие этих микроконтроллеров может достигать значения до 1 миллиона операций в секунду на тактовой частоте 1МГц. В семейство AVR контроллеров входят микроконтроллеры с различным сочетанием периферийных устройств, различными объемами встроенной памяти и различным количеством выводов. Такое разнообразие дает разработчику возможность сделать оптимальный выбор и использовать именно тот микроконтроллер, который наилучшим образом подходит для его нужд.
За последние годы микроконтроллеры AVR приобрели большую популярность, привлекая разработчиков достаточно выгодным соотношением показателей «цена / быстродействие / энергопотребление», удобными режимами программирования, доступностью программно - аппаратных средств поддержки и широкой номенклатурой выпускаемых кристаллов. Микроконтроллеры этой серии представляют собой удобный инструмент для создания современных высокопроизводительных и экономичных встраиваемых контроллеров многоцелевого назначения. В частности, они используются в автомобильной электронике, бытовой технике, сетевых картах, и материнских платах компьютеров, в мобильных телефонах нового поколения и т.д.
Улучшенная RISC (enhanced RISC) архитектура AVR микроконтроллеров (рисунок 1.16) объединяет в себе комплекс решений, направленных на повышение быстродействия микропроцессорного ядра AVR.
Рисунок 1.16 - Архитектура AVR микроконтроллеров
Арифметико-логическое устройство (ALU), в котором выполняются все вычислительные операции, имеет доступ к 32-м оперативным регистрам, объединенным в регистровый файл. Выборка содержимого регистров, выполнение операции и запись результата обратно в регистровый файл выполняются за один машинный цикл. Для сравнения полезно вспомнить, что большинство встраиваемых микроконтроллеров имеют только один такой регистр, непосредственно доступный ALU - аккумулятор, что требует включения в программу дополнительных команд его загрузки и считывания.
Вся программная память AVR-микроконтроллеров выполнена по технологии FLASH и размещена на кристалле. Она представляет собой последовательность 16-разрядных ячеек и имеет емкость от 512 слов до 64K слов в зависимости от типа кристалла.
Во FLASH-память, кроме программы, могут быть записаны постоянные данные, которые не изменяются во время функционирования микропроцессорной системы. Это различные константы, таблицы знакогенераторов, таблицы линеаризации датчиков и т. п.
Достоинством технологии FLASH является высокая степень упаковки, а недостатком то, что она не позволяет стирать отдельные ячейки. Поэтому всегда выполняется полная очистка всей памяти программ. При этом для AVR гарантируется, как минимум, 1000 циклов перезаписи FLASH-памяти.
Разделение шин доступа к FLASH памяти и SRAM памяти дает возможность иметь шины данных для памяти данных и памяти программ различной разрядности, а также использовать технологию конвейеризации. Конвейеризация заключается в том, что во время исполнения текущей команды программный код следующей уже выбирается из памяти и дешифрируется.
Для сравнения вспомним, что у микроконтроллеров семейства MCS-51 выборка кода команды и ее исполнение осуществляются последовательно, что занимает один машинный цикл, который длится 12 периодов кварцевого резонатора (рисунок 1.17).
В случае использования конвейера приведенную длительность машинного цикла можно сократить. Так, у PIC-микроконтроллеров фирмы Microchip за счет использования конвейера удалось уменьшить длительность машинного цикла до 4 периодов кварцевого резонатора. Длительность же машинного цикла AVR составляет один период кварцевого резонатора. Таким образом, AVR способен обеспечивать заданную производительность при более низкой тактовой частоте. Именно эта особенность архитектуры и позволяет AVR-микроконтроллерам иметь наилучшее соотношение энергопотребление/производительность, так как потребление КМОП микросхем, как известно, определяется их рабочей частотой.
Рисунок 1.17
EEPROM блок электрически стираемой памяти AVR предназначен для хранения энергонезависимых данных, которые могут изменяться непосредственно на объекте. Это калибровочные коэффициенты, различные установки, конфигурационные параметры системы. EEPROM-память имеет меньшую, по сравнению с FLASH, емкость (до 4 Кбайт), но при этом допускает возможность побайтной перезаписи ячеек, которая может происходить как под управлением внешнего процессора, так и под управлением собственно AVR-микроконтроллера во время его работы по программе.
Программирование энергонезависимых блоков памяти AVR может осуществляться как параллельно, так и последовательно через SPI (Serial Peripheral Interface) интерфейс.
Управление и обмен данными с EEPROM-памятью и со всеми периферийными узлами осуществляется при помощи регистров ввода/вывода, которые имеются в каждом периферийном узле.
1.5 Анализ силовых транзисторов, применяемых в преобразователях напряжения
1.5.1 Биполярный транзистор с изолированным затвором (IGBT - Insulated Gate Bipolar Transistors) - полностью управляемый полупроводниковый прибор, в основе которого трёхслойная структура. Его включение и выключение осуществляются подачей и снятием положительного напряжения между затвором и истоком. На рисунке 1.18 приведено условное обозначение IGBT.
Рисунок 1.18 - Условное обозначение IGBT
Коммерческое использование IGBT началось с 80-х годов и уже претерпела четыре стадии своего развития:
- I поколение IGBT (1985 г.): предельные коммутируемые напряжения 1000 В и токи 200 А в модульном и 25 А в дискретном исполнении, прямые падения напряжения в открытом состоянии 3,0-3,5 В, частоты коммутации до 5 кГц (время включения/выключения около 1 мкс).
- II поколение (1991 г.): коммутируемые напряжения до 1600 В, токи до 500 А в модульном и 50 А в дискретном исполнении; прямое падение напряжения 2,5-3,0 В, частота коммутации до 20 кГц (время включения/ выключения около 0,5 мкс).
- III поколение (1994 г.): коммутируемое напряжение до 3500 В, токи 1200 А в модульном исполнении. Для приборов с напряжением до 1800 В и токов до 600 А прямое падение напряжения составляет 1,5-2,2 В, частоты коммутации до 50 кГц (время включения/ выключения около 200 нс).
- IV поколение (1998 г.): коммутируемое напряжение до 4500 В, токи до 1800 А в модульном исполнении; прямое падение напряжения 1,0-1,5 В, частота коммутации до 50 кГц (время включения/ выключения около 200 нс).
IGBT являются продуктом развития технологии силовых транзисторов со структурой металл-оксид-полупроводник, управляемых электрическим полем (MOSFET-Metal-Oxid-Semiconductor-Field-Effect-Transistor) и сочетают в себе два транзистора в одной полупроводниковой структуре: биполярный (образующий силовой канал) и полевой (образующий канал управления). Эквивалентная схема включения двух транзисторов приведена на рисунке 1.19.
Рисунок 1.19 - Схема соединения транзисторов в единой структуре IGBT
Прибор введён в силовую цепь выводами биполярного транзистора E (эмиттер) и C (коллектор), а в цепь управления - выводом G (затвор). Таким образом, IGBT имеет три внешних вывода: эмиттер, коллектор, затвор. Соединения эмиттера и стока (D), базы и истока (S) являются внутренними. Сочетание двух приборов в одной структуре позволило объединить достоинства полевых и биполярных транзисторов: высокое входное сопротивление с высокой токовой нагрузкой и малым сопротивлением во включённом состоянии.
Рисунок 1.20 - Диаграмма напряжения и тока управления
Схематичный разрез структуры IGBT показан на рисунке 1.21, а. Биполярный транзистор образован слоями p+ (эмиттер), n (база), p (коллектор); полевой - слоями n (исток), n+ (сток) и металлической пластиной (затвор). Слои p+ и p имеют внешние выводы, включаемые в силовую цепь. Затвор имеет вывод, включаемый в цепь управления. На рисунке 1.21, б изображена структура IGBT IV поколения, выполненного по технологии "утопленного" канала (trench-gate technology), позволяющей исключить сопротивление между p-базами и уменьшить размеры прибора в несколько раз.
Рисунок 1.21 - Схематичный разрез структуры IGBT
Процесс включения IGBT можно разделить на два этапа: после подачи положительного напряжения между затвором и истоком происходит открытие полевого транзистора (формируется n - канал между истоком и стоком). Движение зарядов из области n в область p приводит к открытию биполярного транзистора и возникновению тока от эмиттера к коллектору. Таким образом, полевой транзистор управляет работой биполярного.
Для IGBT с номинальным напряжением в диапазоне 600-1200 В в полностью включённом состоянии прямое падение напряжения, так же как и для биполярных транзисторов, находится в диапазоне 1,5-3,5 В. Это значительно меньше, чем характерное падение напряжения на силовых MOSFET в проводящем состоянии с такими же номинальными напряжениями.
С другой стороны, MOSFET c номинальными напряжениями 200 В и меньше имеют более низкое значение напряжения во включённом состоянии, чем IGBT , и остаются непревзойдёнными в этом отношении в области низких рабочих напряжений и коммутируемых токов до 50 А.
По быстродействию IGBT уступают MOSFET, но значительно превосходят биполярные. Типичные значения времени рассасывания накопленного заряда и спадания тока при выключении IGBT находятся в диапазонах 0,2-0,4 и 0,2-1,5 мкс, соответственно.
Область безопасной работы IGBT позволяет успешно обеспечить его надёжную работу без применения дополнительных цепей формирования траектории переключения при частотах от 10 до 20 кГц для модулей с номинальными токами в несколько сотен ампер. Такими качествами не обладают биполярные транзисторы, соединённые по схеме Дарлингтона.
Так же как и дискретные, MOSFET вытеснили биполярные в ключевых источниках питания с напряжением до 500 В, так и дискретные IGBT делают то же самое в источниках с более высокими напряжениями (до 3500 В).
1.5.2 IGBT-модули. В настоящее время транзисторы IGBT выпускаются, как правило, в виде модулей в прямоугольных корпусах с односторонним прижимом и охлаждением ("Mitsubishi", "Siemens", "Semikron" и др.) и таблеточном исполнении с двухсторонним охлаждением ("Toshiba Semiconductor Group"). Модули с односторонним охлаждением выполняются в прочном пластмассовом корпусе с паяными контактами и изолированным основанием. Все электрические контакты находятся в верхней части корпуса. Отвод тепла осуществляется через основание. Типовая конструкция модуля в прямоугольном корпусе показана на рисунке 1.22.
Рисунок 1.22 - Типовая конструкция IGBT-модуля.
где: 1 - кристалл;
2 - слой керамики;
3 - спайка;
4 - нижнее тепловыводящее основание.
Ток управления IGBT мал, поэтому цепь управления - драйвер конструктивно компактна. Наиболее целесообразно располагать цепи драйвера в непосредственной близости от силового ключа. В модулях IGBT драйверы непосредственно включены в их структуру. "Интеллектуальные" транзисторные модули (ИТМ), выполненные на IGBT, также содержат "интеллектуальные" устройства защиты от токов короткого замыкания, системы диагностирования, обеспечивающие защиту от исчезновения управляющего сигнала, одновременной проводимости в противоположных плечах силовой схемы, исчезновения напряжения источника питания и других аварийных явлений. В структуре ИТМ на IGBT предусматривается в ряде случаев система управления с широтно-импульсной модуляцией (ШИМ) и однокристальная ЭВМ. Во многих модулях имеется схема активного фильтра для коррекции коэффициента мощности и уменьшения содержания высших гармонических в питающей сети.
IGBT-модуль по внутренней электрической схеме может представлять собой единичный IGBT, двойной модуль (half-bridge), где два IGBT соединены последовательно (полумост), прерыватель (chopper), в котором единичный IGBT последовательно соединён с диодом, однофазный или трёхфазный мост. Во всех случаях, кроме прерывателя, модуль содержит параллельно каждому IGBT встроенный обратный диод. Наиболее распространённые схемы соединений IGBT- модулей приведены на рисунке 1.23.
Рисунок 1.23 - Схемы IGBT-модулей
Интенсивно развивается технология корпусирования паяной конструкции силовых модулей с целью дальнейшего снижения габаритов и массы, повышения надёжности, энерго- и термоциклоустойчивости, уменьшения теплового сопротивления и стоимости. Эти цели достигаются применением новых материалов и технологий сборки на тонкие и AlN керамические подложки в корпусах с малоиндуктивными выводами, разработкой специальных конструкций силовых модулей с интегрированным жидкостным охлаждением и созданием силовых модулей, включая "интеллектуальные", с использованием матричных композиционных материалов, имеющих хорошие теплопроводящие свойства и низкие, согласованные с кремнием и керамикой, коэффициенты теплового расширения (КТР).
В модулях с интегральным жидкостным охлаждением почти в четыре раза удаётся увеличить отводимую рассеиваемую мощность по сравнению с сопоставимой по электрическим параметрам традиционной конструкцией силового модуля с воздушным охлаждением. Применение матричных композиционных материалов (MMC-Metal Matrix Composite) открывает новые перспективы в создании высокомощных, компактных, прочных, надёжных силовых модулей. MMC имеют высокую теплопроводность (MMC-150 Вт/(м*К), Cu-370, Al-200, Si-80), низкий КТР (MMC-7, Cu-17, Al-23, Si-4, -7, AlN-7), что позволяет снизить до минимума напряжённости в конструкции модуля, особенно в чипах силовых приборов, обеспечивая хорошую электрическую изоляцию и эффективный отвод тепла. В настоящее время по этой концепции созданы "интелектуальные" силовые модули (выпрямитель-инвертор) мощностью до 100 кВт.
Наряду с развитием технологии паяной конструкции силовых модулей с изолированным основанием (предельные параметры 1,2 кА, 3,5 кВ) продолжает интенсивно развиваться технология прижимной конструкции IGBT- модулей, подобная таблеточной конструкции SCR (Silicon Controlled Rectifier) и GTO - press-pack technology, в которой наряду с уменьшением более чем в 10 раз теплового сопротивления и габаритов значительно улучшены надёжность, термоциклоустойчивость. Наиболее высоких параметров IGBT- модулей прижимной конструкции достигла кампания "Toshiba"(PP HV IGBT-press pack high voltage IGBT).
Дискретные приборы в корпусах ТО-220 и Т-247 ("Fullpak") изготовляются массово и имеют низкую стоимость в расчёте на один ампер номинального тока (максимальное значение рабочего тока 70 А). Сильноточные модули с электрической изоляцией, как правило, содержат ключи, соединённые по полумостовой ключевой схеме или с одноключевой конфигурацией. В этих модулях диапазон номинальных токов находится в диапазоне от 25 А (для полумостовой схемы с напряжением на 1200 В) до 600 А (для одноключевой схемы с напряжением 600 В). Привлекательными чертами сильноточных модулей являются: наличие электрической изоляции, простота монтажа с охладителем и лёгкость связи с другими модулями для повышения нагрузки цепи. Они также позволяют избежать использования параллельного соединения ключей для токов, превышающих сотни ампер. Использование приборов в корпусах ТО-220 и ТО-247 со встроенными обратными быстродействующими диодами становится особенно предпочтительным при разработке инверторов. В этом случае требуемое число силовых полупроводниковых компонентов уменьшается на 50 % по сравнению с использованием IGBT и диодов в виде отдельных элементов. Перекрываемые области диапазонов токов, где использование дискретных приборов экономически предпочтительнее по сравнению с сильноточными модулями, могут быть расширены за счёт параллельного соединения отдельных приборов. Модуль, имеющий наибольший номинальный ток, содержит и наибольшую площадь кремниевого кристалла, которая используется при полной токовой загрузке модуля. В таком же модуле с неполной токовой нагрузкой общая площадь кремния используется частично. Полностью загруженный по току модуль с номинальными параметрами 200 А, 600 В с полумостовой схемой эквивалентен по содержанию кремния восьми дискретным приборам в корпусе ТО-247. Для сравнения такой модуль с частичной загрузкой в 50 А эквивалентен двум приборам в корпусе ТО-247. Так как стоимость модуля существенно зависит от количества содержащегося в нём кремния, полностью загруженный по току модуль имеет более низкую стоимость одного номинального ампера по сравнению с частично загруженным, но стоимость 1 А номинального тока полностью загруженного по току модуля в 1,5 раза и более превышает аналогичный показатель для эквивалентного числа дискретных компонентов. В противовес преимуществу дискретных компонентов в стоимости компонента необходимо учитывать дополнительные расходы на монтаж, необходимость снижения значений номинальных токов при их параллельном соединении и другие технические факторы, связанные с использованием определённого числа соединённых между собой дискретных компонентов. Основное различие между дискретными приборами и сильноточными модулями заключается в способе электрической связи их с другими элементами схемы. Дискретные компоненты соединяются с элементами схемы на печатной плате посредством пайки. Максимальное значение токов в контактных соединениях печатной платы обычно не превосходит 100 А в установившихся режимах работы. Это накладывает естественные ограничения на число параллельно соединяемых компонентов. С другой стороны, сильноточные модули имеют выводы под винтовые зажимы. Поэтому они могут соединяться с кабельными наконечниками или непосредственно с токопроводящими шинами. Сильноточные модули также могут напрямую соединятся с печатной платой через сквозные отверстия. Параллельное соединение дискретных компонентов связано с необходимостью равномерного распределения между ними потерь мощности, по возможности наиболее точного выравнивания значений температур полупроводниковых переходов соединяемых дискретных приборов. Различие электрических характеристик отдельных приборов требует создания для каждого из них определённого запаса по току нагрузки, составляющего примерно 20% максимально допустимого значения. Даже при создании такого запаса по току необходимо обеспечить хороший теплоотвод от каждого прибора, чтобы обеспечить равенство температур полупроводниковых переходов.
Наличие электрической изоляции создаёт в местах крепления приборов к охладителю тепловые барьеры, ухудшающие равномерность распределения температур переходов отдельных приборов. По этой причине приборы в корпусах "Fullpak" (Int-A-Pak, Dual-Int-A-Pak, IMS, SOT, Co-Packs, ZIP, DIP, Flange-B и другие) с электрической изоляцией не идеальны для параллельного их соединения. Параллельно соединяемые приборы следует монтировать на общем охладителе. Если же требуется обеспечить электрическую изоляцию, то приборы следует смонтировать на общей теплоотводящей пластине, обеспечивающей хорошую тепловую связь между переходами приборов. Эта пластина также может использоваться в качестве конструктивного элемента, обеспечивающего механическое соединение приборов. электроизоляционный барьер в этом случае следует создавать между токоведущими частями параллельной сборки приборов и основным охладителем. Асимметрия в разводке электрических цепей, подключаемых к параллельно соединённым приборам, может привести к значительному различию в выделяемых в каждом из них потерях мощности. Наиболее сильно этот эффект проявляется на коммутационных интервалах работы приборов, что приводит к неравномерному распределению динамических потерь мощности. Наиболее существенно на распределение токов в динамических режимах влияют индуктивности эмиттерных цепей, значения которых по возможности должны быть равными, чтобы исключить разбаланс динамических потерь. Известно, что динамические потери уменьшаются со снижением значений рабочей частоты и напряжения. В этих случаях простые схемы соединения приборов без симметрирования соединений могут стать вполне приемлемыми. Там, где содержание динамических потерь превышает 15% общих потерь, необходимо уделять значительное внимание разводке цепей, соединяющих дискретные приборы вследствие значительного влияния симметричности цепей. Пример идеального симметричного расположения цепей представлен на рисунке 1.24. При таком расположении и соединении приборов обеспечивается равенство индуктивностей эмиттерных цепей всех соединённых приборов и тем самым обеспечивается выравнивание между ними динамических потерь.
Рисунок 1.24 - Симметричная разводка электрических цепей в параллельно соединяемых приборах (кольцевое соединение).
где: 1 - охладитель;
2 - печатная плата;
3 - соединение эмиттеров;
4 - соединение входов низкой стороны.
В настоящее время производство силовых IGBT-модулей освоено рядом российских предприятий электронной промышленности (АО "Электровыпрямитель", НПК "ИСЭ" и другие). Основными элементами в модулях являются IGBT-чипы, изготовленные по NPT (Non punch through) технологии. IGBT - транзисторы, изготовленные по этой технологии, обладают высокой du /dt стойкостью, практически прямоугольной областью безопасной работы, что обеспечивает надёжную работу приборов при предельных загрузках по току и напряжению. Эти транзисторы имеют положительный температурный коэффициент напряжения насыщения, что позволяет успешно использовать IGBT- модули в параллельных соединениях. Особенностью российских модулей является низкое время спада тока при выключении, а также очень низкие и практически не зависящие от температуры остаточные токи. Это особенно важно при работе транзисторов на высоких частотах. Модули выполняются по одно - (серия МДТКИ) и двухключевой (М2ТКИ) схемам, а также по схеме прерывателя тока (чоппера - серия МТКИД). Транзисторы шунтируются диодами обратного тока, в качестве которых используются супербыстровосстанавливающиеся диоды с "мягким" восстановлением (FRD диоды).
IGBT-модули первого конструктивного исполнения (ширина модуля 34 мм) рассчитаны на токи 25, 50 и 75 А и предназначены для инверторов мощностью от 2 до 15 кВт. Модули второго конструктивного исполнения (ширина модуля 62 мм) рассчитаны на токи 100, 150 и 200 А и применяются в инверторах мощностью от 20 до 60 кВт. И самые мощные в этом ряду IGBT- модули третьего исполнения (ширина 62 мм) на токи 200, 320 и 400 А могут применятся в инверторах мощностью от 60 до 200 кВт.
IGBT - модули зарубежного производства на российском рынке электронных компонентов представлены в основном фирмами "Mitsubishi", "International Rectifier", "Hitachi" (рисунок 1.25).
Рисунок 1.25 - Схема включения IGBT- модуля типа MBN1200D33 фирмы Hitachi
На сегодняшний день IBGT как класс приборов силовой электроники занимает и будет занимать доминирующее положение для диапазона мощностей от единиц киловатт до единиц мегаватт. Дальнейшее развитие IGBT связано с требованиями рынка и будет идти по пути:
- повышения диапазона предельных коммутируемых токов и напряжений (единицы килоампер, 5-7 кВ);
- повышения быстродействия;
- повышения стойкости к перегрузкам и аварийным режимам;
- снижения прямого падения напряжения;
- разработка новых структур с плотностями токов, приближающихся к тиристорным;
- развития "интеллектуальных" IGBT (с встроенными функциями диагностики и защит) и модулей на их основе;
- создания новых высоконадёжных корпусов, в том числе с использованием MMC (AlSiC) и прижимной конструкции;
- повышения частоты и снижение потерь SiC быстровосстанавливающихся обратных диодов;
- применения прямого водяного охлаждения для исключения соединения основание - охладитель.
2 Разработка структурной схемы
2.1 Функции импульсного регулятора (ИР) напряжения и тока
Основной функцией, которую должен реализовать импульсный регулятор - воспроизведение среднего значения напряжения на выходе, посредством ШИМ управляющих импульсов на затворах транзисторов. На рисунке 2.1 приведены временные диаграммы инвертора напряжения.
Рисунок 2.1 – Временные диаграммы инвертора напряжения
Для разработки импульсного регулятора необходима передаточная характеристика широтно-импульсного модулятора. Входными данными для ШИМ будет напряжение ошибки регулирования, полученное посредством аналого-цифрового преобразования. Так как размах шкалы АЦП составляет 4,096 В, для обеспечения двойного запаса по регулированию, в качестве максимальной входной величины выберем 2,048 В, которая соответствует выходному напряжению 247В. Таким образом, коэффициент передачи ШИМ будет равен:
(2.1 а)
или если принять входное напряжение в виде дискретов АЦП, а напряжение 247 В принять равным значению скважности 0x80/0xFF (128/255) в 8-разрядном ШИМе :
(2.1 б)
Передаточная характеристика показана на рисунке 2.2.
Рисунок 2.2 - Передаточная характеристика ШИМ
Следующими функциями регулятора являются режимы:
- регулирования по напряжению;
- ограничения зарядного тока;
- ограничения выходного тока.
Для этих целей в схеме имеются датчики напряжения ДН, зарядного тока – ДТ1, и ограничения тока – ДТ2.
Поскольку эти режимы не требуют одновременной реализации, то для выбора режима будем использовать коммутатор, с адресными входами A0 и А1.
Сигнальные линии подключенные к этим входам обозначим соответственно А0_MUX и А1_MUX. Выбор режима будет происходить согласно комбинациям, указанным в таблице 2.1.
Таблица 2.1 – Адреса выбора режима
|
Адрес |
Канал |
|
|
A0_MUX |
A1_MUX |
|
|
0 |
0 |
Напряжение с ДН |
|
0 |
1 |
Напряжение с ДТ1 |
|
1 |
0 |
Напряжение с ДТ1 |
|
1 |
1 |
Резерв (+5В) |
Для согласования с элементом регулирования – сумматором между коммутатором и сумматором – включаем делитель напряжения.
Еще одной функцией согласно ТЗ является прием команд выбора режима работы регулятора по интерфейсу IIC, а также выработка сигнала идентификации RDY – в случае готовности регулятора к работе.
На основании перечисленных выше функций, становится очевидной необходимость использования интеллектуального устройства, в качестве которого выбирается микроконтроллер (МК). В данном проекте используется МК Atmega 8 фирмы ATMEL. Структурная схема регулятора представлена на рисунке 2.3.
Рисунок 2.3 – Структурная схема импульсного регулятора
2.2 Разработка модели регулятора
Анализ прототипов, приведенных в 1.1, показывает, что схема регулирования основывается на ПИД-регуляторах. Следует отметить, что наличие интегратора позволяет в статическом режиме свести ошибку регулирования к нулю, при этом существенно ухудшает динамические свойства регулятора и, кроме этого, предъявляет высокие требования к его устойчивости, что влечет за собой необходимость введения достаточно сложных систем коррекции, которые будут зависеть от характера нагрузки.
В данном проекте предполагается статическая система регулирования, то есть регулятор будет работать по ошибке регулирования. Её величина реализуется во много раз меньше, чем погрешность регулятора. Это возможно выполнить в том случае, если дискриминатор ошибки будет реализован на аналоговом элементе (например, на операционном усилителе). В нашем случае в роли дискриминатора выступает сумматор, складывающий Uзад и Uос, взятое с обратным знаком. Выход сумматора подключим к МК. Напряжение задания Uзад задается кодом числоимпульсной модуляции (ШИМ-вход), амплитуда которого задается с помощью прецизионного источника напряжения Еоп = 4,096.
Структурная схема регулятора в режиме регулирования напряжения представлена на рисунке 2.4.
Рисунок 2.4 – Структурная схема регулятора в режиме стабилизации напряжения
Коэффициент Ко=6026 выбран исходя из требований технического задания. Передаточную характеристику звена ФНЧ определим по формуле (2.2)
(2.2)
Из схемы следует, что разомкнутая система носит второй порядок, и, следовательно, требует коррекции в виде дифференциального звена первого порядка. Структурная схема регулятора с дифференциальным звеном приведена на рисунке 2.5.
Рисунок 2.5 - Структурная схема регулятора с дифференциальным звеном
Для исследования контура регулирования и определения параметров корректирующих звеньев была создана математическая модель регулятора в среде MathCad. Получены следующие результаты.
Режим стабилизации напряжения (СН).
Рисунок 2.6 – АЧХ разомкнутой системы в режиме СН
Рисунок 2.7 – ФЧХ разомкнутой системы в режиме СН
Из рисунков 2.6 и 2.7 следует, что в окрестности единичного коэффициента передачи запас по фазе составляет 100 градусов при номинальной нагрузке 10 Ом и 50 градусов на холостом ходу при сопротивлении потерь 1,5 кОм.
Рисунок 2.8 – АЧХ замкнутой системы в режиме СН
Рисунок 2.9 – ФЧХ замкнутой системы в режиме СН
Рисунок 2.10 – АЧХ коэффициента передаче по ошибке регулирования в режиме СН
Из рисунка 2.8 и 2.9 следует, что полоса «прозрачности», в пределах которой система регулирования воспроизводит выходную величину с заданной погрешностью составляет 0…1000 рад/сек.
Из рисунка 2.10 следует, что ошибка регулирования начинает возрастать, начиная с частоты 10 рад/сек.
Из анализа результатов математического моделирования следует, что в систему регулирования действительно необходимо включить звено коррекции с коэффициентом передачи, определяемым по формуле (2.3):
(2.3)
Коэффициент, равный 0.01 в (2.3) может изменяться в зависимости от характера нагрузки. Поэтому следует предусмотреть его задание программным путем, и следовательно данное дифференцирование необходимо производить также программно, посредством использования микроконтроллера. Данная математическая модель была исследована с помощью электронной лаборатории MultiSim. Схема исследования изображена на рисунке 2.11. Осциллограммы переходного процесса, пульсаций и среднего значения напряжения приведены на рисунках 2.12 – 2.14.
Рисунок 2.11 – Схема исследования в среде MultiSim в режиме СН
Рисунок 2.12 – Переходной процесс в режиме СН
Рисунок 2.13 – Пульсации напряжения в режиме СН
Рисунок 2.14 – Среднее значение напряжения в режиме СН
Наиболее оптимальный переходной процесс при минимальных пульсациях получается при =0,001. Погрешность регулирования выходного напряжения по среднему значению напряжения не превышает 1%.
Режим ограничения зарядного тока (ОЗТ). Структурная схема регулятора в этом режиме представлена на рисунке 2.15. Датчиком зарядного тока является шунт, с которого снимается напряжение эквивалентное величине зарядного тока. Значение шунта рассчитывается по формуле (2.4):
. (2.4)
Рисунок 2.15 – Регулятор тока в режиме ограничения зарядного тока
Рисунок 2.16 – АЧХ разомкнутой системы в режиме ОЗТ
Рисунок 2.17 – ФЧХ разомкнутой системы в режиме ОЗТ
Из рисунков 2.16 и 2.17 следует, что в окрестности единичного коэффициента передачи запас по фазе составляет 120 градусов.
Рисунок 2.18 – АЧХ замкнутой системы в режиме ОЗТ
Рисунок 2.19 – ФЧХ замкнутой системы в режиме ОЗТ
Рисунок 2.20 – АЧХ коэффициента передаче по ошибке регулирования в режиме ОЗТ
Из рисунка 2.18 и 2.19 следует, что полоса «прозрачности», в пределах которой система регулирования воспроизводит выходную величину с заданной погрешностью составляет 0…500 рад/сек.
Из рисунка 2.20 следует, что ошибка регулирования начинает возрастать, начиная с частоты 0,1 рад/сек.
Схема исследования с помощью электронной лаборатории MultiSim приведена на рисунке 2.21. Осциллограммы переходного процесса, пульсаций и среднего значения напряжения на шунте приведены на рисунках 2.22 – 2.24.
Рисунок 2.21 – Схема исследования в среде MultiSim в режиме ОЗТ
Рисунок 2.22 – Переходной процесс в режиме ОЗТ
Рисунок 2.23 – Пульсации напряжения на шунте в режиме ОЗТ
Рисунок 2.24 – Среднее значение напряжения на шунте в режиме ОЗТ
Режим ограничения выходного тока (ОВТ). Структурная схема регулятора в этом режиме представлена на рисунке 2.25. Датчиком выходного тока является шунт, с которого снимается напряжение эквивалентное величине выходного тока. Значение шунта рассчитывается по формуле (2.4).
Рисунок 2.25 – Регулятор тока в режиме ограничения выходного тока
Рисунок 2.26 – АЧХ разомкнутой системы в режиме ОВТ
Рисунок 2.27 – ФЧХ разомкнутой системы в режиме ОВТ
Из рисунков 2.26 и 2.27 следует, что в окрестности единичного коэффициента передачи запас по фазе составляет около 120 градусов.
Рисунок 2.28 – АЧХ замкнутой системы в режиме ОВТ
Рисунок 2.29 – ФЧХ замкнутой системы в режиме ОВТ
Рисунок 2.30 – АЧХ коэффициента передаче по ошибке регулирования в режиме ОВТ
Полоса «прозрачности» для этого режима составляет 0…500 рад/сек. Ошибка регулирования начинает возрастать, начиная с частоты 10 рад/сек.
Схема исследования в лаборатории MultiSim изображена на рисунке 2.31. Осциллограммы переходного процесса, пульсаций и среднего значения напряжения на шунте приведены на рисунках 2.32 – 2.34.
Рисунок 2.31 – Схема исследования в среде MultiSim в режиме ОВТ
Рисунок 2.32 – Переходной процесс в режиме ОВТ
Рисунок 2.33 – Пульсации напряжения на шунте в режиме ОВТ
Рисунок 2.34 – Среднее значение напряжения на шунте в режиме ОВТ
3 Разработка алгоритма и программы для МК
В основе устройства управления регулятором находится МК, соответственно необходимо написать для него прикладную программу. Часть программного обеспечения для любой системы на МК также важна, как и аппаратная часть той же системы, лишь работая в полном «согласие» друг с другом они могут привести к положительному результату работы всей системы в целом. В начале этого раздела описывается алгоритм работы программы, далее принятый алгоритм описывается на языке С.
3.1 Разработка алгоритма
В предыдущем разделе были рассмотрены функции, которые должен выполнять регулятор, значительна часть из них, возлагалась на программу МК. Таким образом, программа должна:
а) выполнять коммутацию режимов работы в соответствии с таблицей 2.1;
б) выполнять аналогово-цифровое преобразование ошибки регулирования;
г) выполнять дифференцирование;
в) выполнять масштабирование преобразованного напряжения в соответствии с коэффициентом передачи ШИМ (рисунок 2.2);
д) принимать команды выбора режима работы регулятора по интерфейсу IIC;
е) производить регулирование через фиксированную задержку
д) вырабатывать сигнал идентификации RDY для управляющего контроллера – в случае готовности регулятора к работе.
Так как частота шим-сигнала равна 31250 Гц, то для того чтобы не было поспешного регулирования, регулирование необходимо выполнять с задержкой в 32 мкс. Для этих целей будет использовано прерывание по переполнению таймера и все преобразования (дифференцирование и масштабирование) будут выполняться в этом прерывании. Прием команд выбора режима работы также будет обрабатываться аппаратно, с использованием соответствующего прерывания. Настройка всех периферийных модулей, в числе которых таймеры, ацп, TWI, PWI, а также необходимые порты, оформлена в основной программе в виде подпрограмм. Таким образом, основная программа состоит из подпрограмм инициализаций периферийных модулей и подпрограмм обработки прерываний от таймера и TWI. Разработанные блок-схемы подпрограмм представлены на листе ГОУ ОГУ 210106.65.1112.02.
3.2 Разработка программы
Программа была написана на языке С, в среде CodeVisionAVR версия 2.04.4a. CodeVisionAVR представляет собой набор утилит, предназначенных для разработки программ для микроконтроллеров AVR. Далее приводится описание подпрограмм согласно принятым выше алгоритмам.
Подпрограмма настройки портов. Расположение выводов портов представлено на рисунке 3.1. Используемые биты портов, а также их назначение приведены в таблице 3.1.
Рисунок 3.1 – Расположение портов Atmega8.
Таблица 3.1 – Назначение портов МК
|
Порт, бит |
Название |
Назначение |
|
PORTB,1 |
OC1A |
Выход А таймера/счетчика Т1 |
|
PORTB,6 |
XTAL1/TOSC1 |
Вход тактового генератора |
|
PORTB,7 |
XTAL2/TOSC2 |
Вход тактового генератора |
|
PORTC,0 |
ADC0 |
Вход АЦП |
|
PORTC,4 |
SDA |
Вход/выход данных модуля TWI |
|
PORTC,5 |
SCL |
Вход/выход тактового сигнала модуля TWI |
|
PORTD,0 |
RXD |
Выход A0_MUX коммутатора |
|
PORTD,1 |
TXD |
Выход A1_MUX коммутатора |
|
PORTD,7 |
AIN1 |
Сигнал RDY |
Далее опишем инициализацию портов на языке С.
|
void INIT_PORTS() { |
//подпрограмма настройки портов |
|
DDRB=0x3F; |
//PB6,PB7 на ввод, остальные на вывод |
|
DDRC=0x00; |
//PORTC на ввод |
|
DDRD=0xFF; |
//PORTD на вывод |
|
PORTC=0xF0; |
//вкл. Подтягивающие резисторы на PC6,PC7 |
|
PORTD=0x03; |
//выбрать коммутатором режим «стоп» по умолчанию |
|
} |
|
Включение подтягивающих резисторов на линиях данных и тактового сигнала интерфейса TWI позволит обойтись без включения в схему внешних резисторов.
Подпрограмма настройки аналогово-цифрового преобразователя. АЦП настраивается с помощью регистров ADMUX и ADCSRA, в которые необходимо записать управляющее слово, определяющее работу преобразователя. Для составления управляющих слов рассмотрим форматы названных регистров. Формат регистра ADMUX показан на рисунке 3.2.
Рисунок 3.2 – Формат регистра ADMUX
Таблица 3.2 поясняет назначение битов регистра ADMUX.
Таблица 3.2 – Назначение битов регистра ADMUX
|
Бит |
Название |
Описание |
|
7,6 |
REFS1:REFS0 |
Выбор источника опорного напряжения |
|
5 |
ADLAR |
Выравнивание результата преобразования: 0 – вправо, 1 – влево |
|
4 |
MUX4 |
Выбор входного канала |
|
3...0 |
MUX3...MUX0 |
Выбор входного канала |
Таблица 3.3 – Выбор опорного источника АЦП
|
REFS1 |
REFS0 |
Опорный источник |
|
0 |
0 |
AREF, внутренний VИОН отключен |
|
0 |
1 |
AVCC с внешним конденсатором на выводе AREF |
|
1 |
0 |
Зарезервировано |
|
1 |
1 |
Внутренний источник опорного напряжения 2,56В с внешним конденсатором на выводе AREF |
В нашем случае используем внешний ИОН, подключенный к выводу AREF, значит в соответствии с таблицей 3.3 биты REFS1 и REFS0 сброшены в 0.
Обращение к регистрам ADCH и ADCL для получения результата преобразования должно выполняться в определенной последовательности: сначала необходимо прочитать регистр ADCL, а затем ADCH. Благодаря этому можно быть уверенным, что при чтении регистров в них будут находиться составляющие одного и того же результата преобразования. Результат преобразования выравниваем по правой стороне, для этого бит ADLAR оставляем в 0.Для каналов с несимметричным входом результат преобразования определяется выражением:
(3.1)
где VIN – значение входного напряжения;
VREF – величина опорного напряжения.
Биты MUX4 – MUX0 управляют входным мультиплексором. Необходимую комбинацию выбираем с помощью таблицы 3.4.
Таблица 3.4 – Управление входным мультиплексором
|
MUX4 –MUX0 |
Несимметричный вход |
|
00000 |
ADC0 |
|
00001 |
ADC1 |
|
00010 |
ADC2 |
|
00011 |
ADC3 |
|
00100 |
ADC4 |
|
00101 |
ADC5 |
|
00110 |
ADC6 |
|
00111 |
ADC7 |
Используем входной канал ADC0. Соответствующее управляющее слово для регистра ADMUX, учитывая все выше проведенные настройки, имеет вид 0x00 в шестнадцатеричном коде.
Формат регистра ADCSRA представлен на рисунке 3.3.
Рисунок 3.3 - Формат регистра ADCSRA
Таблица 3.4 поясняет назначение битов регистра ADCSRA.
Таблица 3.4 – Назначение битов регистра ADCSRA
|
Бит |
Название |
Описание |
|
7 |
ADEN |
Разрешение АЦП (1 – включено, 0 – выключено) |
|
6 |
ADSC |
Запуск преобразования (1 – начать преобразование) |
|
5 |
ADATE |
Выбор режима работы АЦП |
|
4 |
ADIF |
Флаг прерывания от АЦП |
|
3 |
ADIE |
Разрешение прерывания от АЦП |
|
2...0 |
ADPS2…ADPS0 |
Выбор частоты преобразования |
Если бит ADATE сброшен в 0, АЦП работает в режиме одиночного преобразования. Запуск каждого преобразования в режиме одиночного преобразования осуществляется установкой в 1 бита ADSC регистра ADCSRA. В нашем случае выбираем автоматический перезапуск преобразования, таким образом бит ADATE установлен в 1.
Для формирования тактовой частоты модуля АЦП в нем имеется отдельный предделитель. Коэффициент деления предделителя и соответственно длительность преобразования определяются состоянием битов ADPS2... …ADPS0 регистра ADCSRA. Поставим бит ADPS2 в 1, это позволит задать коэффициент деления равный 16. Частота преобразования таким образом при системной частоте, равной 16 МГц, составит 1 МГц. Таким образом, управляющее слово для регистра ADCSRA будет иметь вид 0хE4.
Далее опишем подпрограмму настройки АЦП на языке С.
|
void ADC_Init() { |
// подпрограмма настройки АЦП |
|
ADCSRA=0xE4; |
//автоматические перезапуск, частота 1 МГц |
|
ADMUX=0x00; |
//0 канал, правое выравнивание |
|
ADCL=0x00; |
//очистка регистра ADCL |
|
ADCH=0x00; |
//очистка регистра ADCH |
|
} |
|
Следующая подпрограмма TWI_INIT настраивает модуль TWI. Интерфейс TWI является полным аналогом базовой версии интерфейса 12С фирмы Philips. Он позволяет объединить вместе до 128 различных устройств с помощью двунаправленной шины, состоящей всего из двух линий: линии тактового сигнала (SCL) и линии данных (SDA). Единственными дополнительными элементами для реализации шины являются два подтягивающих резистора, по одному на каждую линию, которые в нашем случае не нужны, так как в подпрограмме настройки портов включена программная подтяжка этих линий через подтягивающие резисторы.
Рисунок 3.4 – Соединение устройств с помощью шины TWI
Шинные формирователи всех TWI-совместимых устройств выполняются по схеме с открытым коллектором (стоком), что позволяет реализовать функцию «монтажное И». Соответственно, НИЗКИЙ уровень на линии устанавливается тогда, когда одно или более устройств выставляют на линию сигнала лог. О, а ВЫСОКИЙ уровень на линии устанавливается, когда все устройства, подключенные к ней, устанавливают свои выходы в третье состояние.
Таблица 3.5 - Термины, используемые при описании модуля TWI
|
Термин |
Описание |
|
Ведущий (Master) |
Устройство, инициирующее и завершающее передачу данных по шине, а также генерирующее тактовый сигнал SCL |
|
Ведомый (Slave) |
Устройство, адресуемое ведущим |
|
Передатчик (Transmitter) |
Устройство, выдающее данные на шину |
|
Приемник (Reciever) |
Устройство, считывающее данные с шины |
Поскольку шина TWI является последовательной, все данные передаются по ней (по линии SDA) побитно. Каждый передаваемый бит сопровождается импульсом на линии тактового сигнала SCL. Причем сигнал на линии SDA должен быть стабильным в течение всего времени, пока на шине SCL присутствует сигнал лог. 1 (рисунок 3.5). Единственным исключением из этого правила являются два особых состояния шины TWI — СТАРТ и СТОП.
Рисунок 3.5 – Корректная выдача данных на шину SDA
Рисунок 3.6 – Состояния СТАРТ, СТОП и ПОВСТАРТ
В таблице 3.6 приведены регистры модуля TWI, ниже приведено их описание.
Таблица 3.6 – Регистры ввода/вывода модуля TWI
|
Регистр |
Назначение |
|
TWBR |
Регистр скорости передачи |
|
TWSR |
Регистр состояния |
|
TWAR |
Регистр адреса |
|
TWDR |
Регистр данных |
|
TWCR |
Регистр управления |
|
TWAMR |
Регистр маски адреса |
Рисунок 3.7 - Формат регистра TWSR
Таблица 3.7 – Назначение битов регистра TWSR
|
Бит |
Название |
Описание |
|
7..3 |
TWS |
Состояние модуля TWI. Значение, содержащееся в этих битах, отражает состояние узлов модуля и шины TWI. Возможные коды статуса описаны далее. Биты TWS7...3 доступны только для чтения |
|
2 |
- |
Зарезервирован, читается как 0 |
|
1..0 |
TWPS |
Коэффициент деления предделителя контроллера скорости передачи. |
7..3 биты отражают состояние логики блока TWI и двухпроводной последовательной шины. Следует обратить внимание, что считываемое значение из регистра TWSR содержит и 5-разр. код состояния и 2-разр. значение, упраляющее предделителем, поэтому необходимо маскировать 2 младших бита предделителя во время проверки кода состояния.
Рисунок 3.8 - Формат регистра TWDR
Кроме того, в состав блока входит сдвиговый регистр адреса/данных TWDR, который содержит данные передаваемого или принимаемого пакета. Формат данного регистра приведен на рисунке 3.8. Одновременно с выдвиганием содержимого регистра на шину данные с нее вдвигаются в этот регистр. Таким образом, почти всегда, за исключением момента выхода микроконтроллера из «спящего» режима, в регистре TWDR содержится последний байт, имевшийся на шине. При включении питания все биты этого регистра устанавливаются в 1.
Следующий регистр – регистр адреса TWAR. Формат регистра приведен на рисунке 3.9, назначение отдельных битов поясняет таблица 3.8.
Рисунок 3.9 - Формат регистра TWAR
Наш регулятор является ведомым по отношению к управляющему контроллеру, его адрес равен 0x22 в шеснадцатиричной форме, распознавание общих вызовов запрещается. Таким образом, в регистр TWAR следует записать значение 0x22.
Регистр управления TWCR. Формат регистра приведен на рисунке 3.10, назначение отдельных битов поясняет таблица 3.9.
Рисунок 3.10 - Формат регистра TWCR
Таблица 3.9 – Назначение битов регистра TWCR
Бит |
Название |
Описание |
|
7 |
TWINT |
Флаг прерывания от модуля TWI. Этот флаг устанавливается аппаратно после выполнения очередной операции, когда модуль ожидает отклика со стороны программы. Если установлены флаги I регистра SREG и TWIE регистра TWCR, генерируется прерывание и осуществляется вызов соответствующего обработчика. Пока флаг TWI NT установлен, на линии SCL удерживается сигнал НИЗКОГО уровня. Сброс флага может быть осуществлен только записью в него лог. 1 |
|
6
|
TWEA
|
Разрешение бита подтверждения. Бит TWEA управляет формированием бита подтверждения. Если этот бит установлен в 1, то устройство формирует сигнал подтверждения, когда это необходимо. При сбросе бита в 0, устройство виртуально отключается от шины TWI, т. е. бит подтверждения не формируется |
|
5 |
TWSTA |
Флаг состояния СТАРТ. При записи в бит TWSTA лог. 1 модуль проверяет состояние шины TWI и, если шина свободна, формирует состояние СТАРТ Если шина занята, модуль TWI ожидает появления состояния СТОП и только после этого формирует состояние СТАРТ. Флаг должен сбрасываться программно по окончании формирования состояния СТАРТ |
Продолжение таблицы 3.9
Бит |
Название |
Описание |
|
4 |
TWSTO |
Флаг состояния СТОП. В режиме ведущего установка флага TWSTO в 1 приводит к формированию на шине состояния СТОП. Флаг сбрасывается аппаратно по окончании формирования состояния СТОП. Установка флага TWSTO в режиме ведомого может использоваться для выхода из ошибочных ситуаций. После записи в этот бит лог. 1 модуль TWI возвращается в режим неадресованного ведомого, а выводы SCL и SDA устнавливаются в третье состояние. Состояние СТОП, естественно, не формир-уется |
|
3 |
TWWC |
Флаг конфликта записи. Флаг устанавливается в 1 при попытке записи в регистрTWDR, когда флаг прерывания TWI NT сброшен. Флаг сбрасывается при записи в регистр TWDR, когда флаг прерывания TWINT установлен |
|
2
|
TWEN
|
Разрешение работы модуля TWI. Бит TWEN управляет работой модуля TWI. При записи в этот бит лог. 1 модуль TWI включается и берет на себя управление контактами ввода/вывода микроконтроллера, соответствующих выводам SCL и SDA. При сбросе бита TWEN в 0 модуль TWI выключается |
|
1 |
— |
Зарезервирован, читается как 0 |
|
0 |
TWIE |
Разрешение прерывания от модуля TWI. Если в этом бите записана лог. 1 и флаг I регистра SREG также установлен в 1, то прерывание от модуля TWI разрешено |
В нашем случае модуль работает в режиме «ведомый-приемник», поэтому в регистр TWCR запишем значение 0x45.
Далее опишем подпрограмму настройки модуля TWI .
|
void TWI_Init() { |
// подпрограмма настройки TWI |
|
TWAR=0x22; |
// собственный адрес |
|
TWCR=0x45; |
// режим-"ведомый приёмник" |
|
TWDR=0x00; |
//очистка буфера приема |
|
} |
|
Подпрограмма обработки прерывания от модуля TWI. Применение встроенного интерфейса подразумевает работу на прерываниях, возникающих при определенных событиях, которые характеризуются кодом состояния, находящимся в статус – регистре TWSR. Необходимые коды состояний для подчиненного режима приведены в таблице 3.10.
Таблица 3.10 – Коды состояний в режиме «ведомый – приемник»
|
Код состояния TWSR |
Состояние двухпроводной последовательной шины и схемы двухпроводного интерфейса |
Следующее действие выполняемое схемой TWI |
|
0x60 |
Принимается собственный адрес, возвращен ACK |
Принимается байт данных и возвращается NOACK Принимается байт данных и возвращается ACK |
|
0x80 |
Приняты данные, возвращен ACK |
Принимается байт данных и возвращается NOACK Принимается байт данных и возвращается ACK |
|
0xA0 |
Принято условие СТОП или ПОВТ СТАРТ во время подчиненной адресации |
Переключение на безадресный подчиненный режим |
В протоколе I2C после передачи каждого байта информации, предусмотрено окно в 1 такт, для того чтобы устройство, которое выполняет прием данных могло откликнуться. Этот сигнал назван ACK и для его передачи принимающее устройство должно прижать линию SDA к земле в этом такте. Иногда, так же рассматривают сигнал NACK: NOT ACK (принимающее устройство не прижало SDA к земле на 9м такте передачи).
Опишем подпрограмму обработки прерывания от модуля TWI . От модуля предусмотрено аппаратное прерывание, при возникновении которого происходит переход на соответствующий вектор прерывания. Обработка прерывания имеет следующую структуру: при переходе на соответствующий вектор распознается код состояния путем маскирования 3 младших битов в регистре TWSR операцией «логического и» и маски 0xF8, затем полученный код состояния присваивается переменной status, и далее идет индетификация состояния посредством оператора case, в котором код сравнивается с возможными и при совпадении подпрограмма идет по соответствующей ветви оператора case. Так как назначение интерфейса в данном проекте – прием команд выбора режима регулирования, то при появлении в приемном буфере команды режима (команды 0x81, 0x82, 0x84, 0x88) выполняется соответствующая группа операторов, в которую входят выбор постоянной дифференцирования, выбор масштабирующего коэффициента напряжения и выбор канала коммутатора, а также во всех режимах, кроме режима стоп, разрешается прерывание от таймера 0, а таймер 1 переводится в режим шим. Подпрограмма прерывания на языке С выглядит следующим образом:
|
interrupt [18] void Twi(void) { status=TWSR&0xF8;
|
//прерываеие TWI
// код состояния приемника |
|
switch(status) {case 0x60: TWCR|=0x80; case 0x80: bufer=TWDR; switch(bufer) {case 0x81: S1=1;S0=1; TCCR1A=0x01; TIMSK=0x00; TWCR|=0x80;return; case 0x82: S1=0;S0=0; Tau_E=Tau_U;K_E=KU; TCNT0=0xBC; TIMSK=0x01; TWCR|=0x80;return; case 0x84: S1=0;S0=1; Tau_E=Tau_Iz;K_E=KIz; TCNT0=0xBC; TIMSK=0x01; TWCR|=0x80; return; case 0x88: S1=1;S0=0; Tau_E=Tau_IOgr;K_E=KIOgr; TCNT0=0xBC; TIMSK=0x01; TWCR|=0x80; TCCR1A|=0x01;return; default: TWCR|=0x80;return } case 0xA0: TWCR|=0x80;return; default: Er_status=status; TWCR|=0x80;}} |
// принят вызов послан ответ // сброс флага // принят байт послан ответ // принятый байт в буфер // идентификация принятого // режим Off //таймер 1 выключить шим //запретить прерывания от таймера 0 // режим StU
//начальное значение таймера 0 //разрешить прерывания от таймера 0
// режим StI
//режим Lim
// ожидание следующих команд
// если код статуса не обработан выше записать его в ячейку Er_status сбросить флаг и выйти |
Подпрограмма настройки TIMER0. Как было сказано выше регулирование необходимо производить с задержкой равной 32 мкс. Для этого регулировка будет производиться по прерывания от таймера 0, возникающее при его переполнении. Для настройки таймера используются регистры TCCR0, TIMSK, TCNT0. Формат этих регистров и описание отдельных битов приведены ниже.
Рисунок 3.11 - Формат регистра TCCR0
Таблица 3.11 – Выбор частоты синхронизации таймера
|
CS02 |
CS01 |
CS00 |
ЧАСТОТА |
|
0 |
0 |
0 |
Таймер выкл. |
|
0 |
0 |
1 |
clk |
|
0 |
1 |
0 |
clk/8 |
|
0 |
1 |
1 |
clk/64 |
|
1 |
0 |
0 |
clk/256 |
|
1 |
0 |
1 |
clk/1024 |
|
1 |
1 |
0 |
Вывод Т0 счет осуществляется по спадающему фронту импульсов |
|
1 |
1 |
1 |
Вывод Т0, счет осуществляется по нарастающему фронту импульсов |
В регистр TCCR0 запишем значение 0x02, для тактирования с частотой 2000000 Гц. Время переполнения начиная с значения 0x00 до 0xFF составит 128 мкс. Для отсчета 32 мкс. необходимо 64 импульсов тактовой частоты таймера, чтобы выполнилось переполнение необходимо в счетный регистр TCNT0 записать начальное значение – разницу между максимальным значением этого регистра и числом 66, т.е. поместить в TCNT0 значение 0хBC.
Рисунок 3.12 - Формат регистра TCNT0
Счетный регистр таймера/счетчика TCNT0 входит в состав основного блока модуля — блока реверсивного счетчика. В зависимости от режима работы модуля содержимое счетного регистра сбрасывается, инкрементируется или декрементируется по каждому импульсу тактового сигнала таймера/счетчика. Независимо от того, присутствует тактовый сигнал или нет, регистр доступен в любой момент времени как для чтения, так и для записи. После подачи напряжения питания в регистре TCNT0 находится нулевое значение.
Рисунок 3.13 - Формат регистра TIMSK
Таблица 3.12 – Назначение бит регистра TIMSK
|
Т01Еn |
Флаг разрешения прерывания по переполнению таймера/счетчика Tn (n = 0...5) |
|
OCIEn |
Флаг разрешения прерывания по событию «Совпадение» таймера/счетчика Tn ( n = 0,2) |
|
OCIEnB |
Флаг разрешения прерывания по событию «Совпадение А» таймера/счетчика Tn (n = 0...5) |
|
ОС1ЕnC |
Флаг разрешения прерывания по событию «Совпадение В» таймера/счетчика Tn (n = 0...5) |
|
ОС1ЕnC |
Флаг разрешения прерывания по событию «Совпадение С» таймера/счетчика Tn (n = 1,3...5) |
|
TICIEIn |
Флаг разрешения прерывания по событию «Захват» таймера/счетчика Tn (n = 1, 3) |
|
ICIEn |
Флаг разрешения прерывания по событию «Захват» таймера/счетчика Tn (n = 1,3...5) |
Необходимо разрешить прерывание по переполнению таймера, для этого необходимо установить в «1» бит T0IE0. Таким образом в в регистр TIMSK запишем значение 0x01.
С учетом вышесказанного приведем фрагмент настройки таймера 0:
|
TCCR0=0x02; |
// clk/8 |
|
TCNT0=0xBC; |
// начальное значение счетчика |
|
TIMSK=0x01; |
// разрешить прерывание от таймера 0 |
Следующая подпрограмма PWI_INIT() используется в качестве инициализации таймера 1, настроенного в режиме FAST PWM (быстрый шим).
Настройка таймера/счетчика Т1 осуществляется с помощью регистров TCCR1A, TCCR1B, TIMSK. Далее подробнее рассмотрим форматы этих регистров для составления управляющих слов.
Формат регистра TCCR1A показан на рисунке 3.14, а таблица 3.13 поясняет назначение битов.
Рисунок 3.14 - Формат регистра TCCR1A
Таблица 3.13 – Назначение битов регистра TCCR1A
|
Бит |
Название |
Описание |
|
7,6 |
СОМ1А1:СОМ1А0 |
Эти биты определяют состояние вывода ОС1А/В при наступлении события «Совпадение». |
|
5,4 |
СОМ1В1:СОМ1В0 |
|
|
3,2 |
FOC1A:FOC1B |
Принудительное изменение состояния вывода ОС1А/В. При записи в бит FOC1А/В лог. 1 состояние вывода ОС1А/В изменяется в соответствии с установками битов СОМ1х1:СОМ1х0 регистра TCCR1A. |
|
1,0 |
WGM1l:WGM10 |
Совместно с битами WGM13:WGM12 регистра TCCR1В определяют режим работы таймера/счетчика Т1 |
Формат регистра TCCR1В показан на рисунке 4.4 [4].
Рисунок 3.15 - Формат регистра TCCR1В
Таблица 3.14 дает пояснение битам регистра TCCR1В.
Таблица 3.14 – Назначение битов регистра TCCR1В
|
Бит |
Название |
Описание |
|
7 |
ICNC1 |
Если бит, сброшен в 0, схема подавления помех выключена. Если бит, установлен в 1, схема подавления помех включена. |
|
6 |
ICES1 |
Если бит сброшен в 0, значение счетного регистра осуществляется по спадающему фронту сигнала. Если в 1, то по нарастающему фронту. |
|
5 |
- |
Не используется, читается как 0 |
|
4,3 |
WGM13:WGM12 |
Совместно с битами WGM11:WGM10 регистра TCCR1A определяют режим работы таймера/счетчика T1 |
|
2...0 |
CS12...CS10 |
Эти биты определяют источник тактового сигнала микроконтроллера |
Чтобы назначить 8-битный режим Fast PWM («Быстродействующий ШИМ»), с модулем счета 0xFF, необходимо установить в 1 биты WGM12 и WGM10.
При равенстве содержимого счетного регистра и какого-либо регистра сравнения устанавливается соответствующий флаг прерывания OCF1A/ /OCF1B. Одновременно изменяется состояние выхода блока сравнения ОС1А/ОС1В. Состояние этих выходов определяется содержимым битов СОМ1х1:СОМ1х0 регистра TCCR1A [4]. Чтобы таймер/счетчик мог управлять состоянием какого-либо из этих выводов, он должен быть сконфигурирован как выходной (в нашем случае бит 1 регистра DDRB в подпрограмме настройки портов INIT_PORTS() был установлен в 1). Выберем режим, при котором выводы ОС1А/ОС1В сбрасываются в 0 при равенстве счетного регистра и соответствующего регистра сравнения, и устанавливаются в 1 при достижении счетчиком максимального значения. Для этого установим в 1 бит СОМ1А1 и в 0 бит СОМ1A0.
Таким образом, сформированные управляющие слова для регистров управления, имеют следующие значения: 0х81, 0х09 для TCCR1А и TCCR1В соответственно.
Подпрограмма настройки таймера 1 в режиме Fast PWM :
|
void PWI_INIT() { |
// подпрограмма настройки PWI |
|
TCCR1A=0x01; |
// таймер 1 в счетном режиме |
|
TCCR1B=0x09; |
|
|
TCNT1H=0x00; TCNT1L=0x00; |
// обнулить счетный регистр |
|
OCR1AH=0x00; OCR1AL=0x00; |
// обнулить регистр сравнения |
|
} |
|
Далее опишем само регулирование. Регулирование происходит, как было сказано выше, через интервал 32 мкс (частота ШИМ равна 31250 Гц), который задает таймер 0, и по истечению которого происходит прерывание, т.е. регулирование будем производить в подпрограмме обработки прерывания от таймера 0. В данной подпрограмме также реализовано дифференцирующее звено и выполняется масштабирование согласно коэффициенту передачи ШИМ, описанного в разделе 2. Опишем данную подпрограмму.
|
interrupt [TIM0_OVF] void timer0_ovf_isr(void) { |
//подпрограмма прерывания от таймера 0
|
|
ADC_0=ADCW; |
//текущий отсчет |
|
TEMP=ADC_0-ADC_1; |
//dnx разница между текущим и предыдущим |
|
count=Tau_E&0x7f; |
//на столько сдвигать для умножения |
|
MU=K_E&0x7f; |
//масштаб напряжения |
|
if (Tau_E<0) { TEMP>>=count; } |
// умножение на Tau_E
//если Tau_E<0 сдвинуть вправо на число count |
|
if (Tau_E>0) { TEMP<<=count; } |
//если Tau_E>0 сдвинуть влево на число count |
|
ADC_1=ADC_0; |
//использовать в качестве предыдущего для следующего отчета |
|
ADC_0+=TEMP; |
//nx=nx+dnx |
|
if (ADC_0<0) { ADC_0=0; } |
// если nx<0 принять равной ее нулю |
|
TEMP=(ADC_0>>MU); |
//масштабирование для ШИМ |
|
TCCR1A|=0x80; OCR1AL=TEMP; |
//включить ШИМ //загрузка в ШИМ как длительности импульса |
|
TCNT0=0xBC; |
// начальное значение таймера |
|
} |
|
Опишем используемые в программе переменные. В проекте используются 3 битовые переменные порта D: S0, S1 для выбора номера канала коммутатора и RDY для формирования сигнала готовности для управляющего контроллера. Для дифференцирования используются переменные ADC_0, ADC_1, TEMP типа signed int размерностью 16 бит. В энергонезависимой памяти EEPROM помещены постоянные дифференцирования и масштабные коэффициенты ETau_U, ETau_Iz, ETau_IOgr, EKU , EKIz , EKIOgr типа signed char размерностью 8 бит. Для временной инициализации параметров регулирования использованы переменные Tau_U, Tau_Iz, Tau_IOgr, Tau_E, KU, KIz , KIOgr, K_E имеющие тип signed char и размерность 8 бит, такого же типа счетчики сдвигов count, MU, используемые при умножении. Фрагмент описания переменных в программе приведен ниже:
|
#define S0 PORTD.0 #define S1 PORTD.1 #define RDY PORTD.7
|
// битовые переменные |
|
volatile signed int ADC_0, ADC_1, TEMP; volatile unsigned char status, bufer; volatile signed char Tau_U, Tau_Iz, Tau_IOgr, Tau_E, KU , KIz , KIOgr , K_E , count , MU ;
|
//для дифференцирования //для TWI //временные параметры
//счетчики сдвигов |
|
eeprom unsigned char Er_status; eeprom signed char ETau_U=0x87; eeprom signed char ETau_Iz=0x85; eeprom signed char ETau_IOgr=0x87; eeprom signed char EKU=0x82; eeprom signed char EKIz=0x82; eeprom signed char EKIOgr=0x82;
|
//код ошибки TWI //параметры регулирования |
Основная функция main(). Ее назначение – вызов подпрограмм инициализации переферийных модулей, параметров регулирования и выдача сигнала готовности RDY. Опишем данную функцию.
|
void main(void) |
|
|
{ #asm("cli"); |
//запретить все прерывания |
|
INIT_PORTS(); |
//п/п инциализация портов |
|
RDY=0; |
//сигнал «не готов» |
|
ADC_Init(); |
//п/п инциализация ацп |
|
TWI_INIT(); |
//п/п инциализация TWI |
|
PWI_INIT(); |
//п/п инциализация TWI |
|
Tau_U=ETau_U; |
//инициализация параметров регулирования |
|
Tau_Iz=ETau_Iz; |
|
|
Tau_IOgr=ETau_IOgr; |
|
|
KU=EKU; |
|
|
KIz=EKIz; |
|
|
KIOgr=EKIOgr; |
|
|
TCCR0=0x02; |
//частота таймера clk/8 |
|
RDY=1; |
//сигнал «готов» |
|
#asm("sei"); |
//разрешить все прерывания |
|
while (1); |
//бесконечный цикл |
|
} |
|
Полный текст программы для МК приводится в приложении А., загрузочный код в приложении Б.
3.3 Отладка программы
В предыдущем подразделе была написана программа для микроконтроллера. Однако при написании реальной программы, особенно если программа реализует достаточно сложный алгоритм, невозможно избежать ошибок. В этом подразделе проведем отладку написанной программы с помощью пакета PROTEUS VSM.
Proteus VSM состоит из двух самостоятельных программ ISIS и ARES. ARES это трассировщик печатных плат с возможностью создания своих библиотек корпусов. ISIS – это основная программа, в которой и проведем отладку написанной программы.
Для этого в ISIS соберем схему, которая позволила бы проверить:
а) возникновение прерывания при переполнении таймера 0;
б) работу аналогово-цифрового преобразователя;
в) формирование шим - сигналов;
г) выработку сигнал готовности RDY;
д) прием команд выбора режима работы регулирования по интерфейсу TWI.
Такая схема представлена на рисунке 3.16.
Рисунок 3.16 – Схема для отладки программы
Чтобы проверить программу, ее предварительно нужно «зашить» в память МК. В ISIS это делается следующим образом: в окне свойств микроконтроллера в строке PROGRAMM FILE выберем файл прошивки *.COF, который был создан после компиляции в CVAVR файла *.с.
В строке PROCESSOR CLOCK FREQUENCY (тактовая частота процессора) выставим 16 МГц для ведомого и 4 МГц для ведущего. В строке PROGRAMM CONFIGURATION WORD (слово конфигурации) выставлять ничего не надо, так как, соответствующие данные есть в файле-исходнике. Остальные установки также оставляем без изменений.
Для проверки обработки прерывания ставим точку останова на соответствующей подпрограмме обработки прерывания. Затем открываем окно Watch Window и добавляем в него регистр TIFR запускаем моделирование кнопкой RUN и после останова программы фиксируем появлении флага прерывания в регистре TIFR убеждаясь в правильной работе прерывания.
Для проверки работы ацп на канал ADC0 подаем напряжение а в окне Watch Window фиксируем значение регистра ADCL, для 0 В на входе ацп, при опорном напряжении 4,096 В в регистре находится значение 0, при 2,048 В в регистре значении 511, т.е. ацп функционирует правильно.
Проверка сигнала RDY выполняется следующим образом. Запускается моделирование в пошаговом режиме и ведется наблюдение за седьмым битом порта D: вовремя инициализации периферийных модулей данный бит должен быть равен лог. 0, а после инициализации в лог. 1. Проверка показала правильность формирования сигнала RDY.
Для проверки правильности работы модуля TWI в схему добавлен второй контроллер, настроенный в режиме «Master», между собой контроллеры соединяются одноименными выводами SDA и SCL. К этим же выводам подключается осциллограф. Выбор режима работы выполняется нажатием кнопки, подключенной к нулевому выводу порта B. При последовательном переключении режимов на экране осциллографа наблюдаются значения 0х81, 0х82, 0х84, 0х88, которые являются требуемыми.
Для проверки формирования шим – сигналов осциллограф подключается к выводу OC1A, в окно Watch Window добавляется регистр OCR1A, к каналу ацп подключается источник напряжения равный 2,048 В. После запуска моделирования проверяется значение регистра сравнения OCR1A. В регистра сравнения OCR1A находится значение 128 и 64 при входном значении 1,024 В т.е. соблюдается масштабирование согласно коэффициенту передачи шим. Осциллограммы шим – сигналов для этих случаев представлены на рисунках 3.17, 3.18.
Рисунок 3.17 – Шим сигнал со скважностью 0,5
Рисунок 3.18 – Шим сигнал со скважностью 0,2
4 Экономический расчёт проекта
В данном разделе производится расчет себестоимости программного обеспечения импульсного регулятора тока и напряжения. Экономический эффект от внедрения разработанного устройства не рассчитывается, т.к. регулятор применяется в составе устройства предназначенного для учебных и научных целей.
Расчёт себестоимости включает в себя расчёт необходимых затрат, связанных с разработкой программного обеспечения устройства. Калькуляция включает следующие статьи затрат:
- затраты на вспомогательные (расходные) материалы;
- оплата труда программиста;
- отчисления на социальные нужды;
- оплата машинного времени;
- накладные расходы.
Трудоемкость разработки программного обеспечения составляет 2 месяца (352 ч.).
Применяемые расходные материалы представлены в таблице 1.
Таблица 4.1 – Расходные материалы
|
Наименование материала |
Единица измерения |
Норма расхода |
Цена, руб./ед. |
|
Бумага 500л. |
шт. |
1 |
130 |
|
Тонер для лазерного принтера |
шт. |
1 |
100 |
Затраты на вспомогательные (расходные) материалы определяются по формуле:
, (4.1)
руб.
где – норма расхода i-го вспомогательного материала, шт.;
– цена за единицу i-го вспомогательного материала без НДС, р./шт.;
– количество наименований вспомогательных материалов.
Затраты на оплату труда программиста включают основную и дополнительную заработную плату, а также отчисления на социальные нужды, которые рассчитываются по формулам:
, (4.2)
р.
где t – трудоемкость разработки ПО, ч.;
– оклад программиста за месяц, р./мес. (7000 р./мес.);
– фонд рабочего времени работника за месяц, ч/мес.;
– процент премии, % (25 %);
– районный коэффициент, % (15 %).
Фонд рабочего времени работника за месяц определяется по формуле:
, (4.3)
ч.
где – количество рабочих дней в месяце, дней (22 дней);
– продолжительность рабочего дня, ч (8 часов).
Дополнительная заработная плата разработчика определяется по формуле:
, (4.4)
р.
где – норматив дополнительной заработной платы, % (15%).
Отчисления на социальные нужды рассчитываются следующим образом:
, (4.5)
р.
где – норматив отчислений на социальные нужды, (30,4 %).
Таким образом затраты на заработную плату составят:
, (4.6)
р.
Накладные расходы определяются пропорционально основной заработной плате по формуле:
, (4.7)
р.
где – норматив накладных расходов, % (20%).
Затраты на оплату машинного времени определяются по формуле:
, (4.8)
р.
где – трудоёмкость отладки и оформления документации на компьютере, ч (70 % от трудоёмкости разработки ПО);
– стоимость машинного часа работы ЭВМ, р./ч.
, (4.9)
р/ч.
где – полные затраты на эксплуатацию ЭВМ в течении года, р./год;
– действительный годовой фонд времени работы ЭВМ, ч/год.
, (4.10)
ч.
где – количество рабочих дней в году, дней (260 дней);
– длительность рабочего дня, ч (8 ч);
– количество смен, (1);
– процент потерь рабочего времени на ремонтно-профилактические работы,(3 %).
Полные затраты на эксплуатацию ЭВМ определяются по формуле:
, (4.11)
р.
Где - годовые издержки на зарплату обслуживающего персонала, р./год;
– годовые издержки на амортизацию;
- годовые издержки на электроэнергию;
- годовые издержки на расходные материалы;
- годовые издержки на техническое обслуживание и ремонт ЭВМ;
- прочие расходы.
,
р.
(4.12)
где – количество категорий обслуживающего персонала;
– оклад i-категории обслуживающего персонала, р./мес.;
– численность i-категории обслуживающего персонала, чел.;
– количество машин в компьютерном зале (10).
Обслуживанием ЭВМ занимается один работник, 2000 р./мес.
, (4.13)
р.
где – балансовая стоимость ЭВМ (20000 р.);
– норма амортизации.
, (4.14)
где – срок полезного использования (5лет).
, (4.15)
р.
где – суммарная мощность ПК, кВт (0,3 кВт);
– тариф на электроэнергию, р./кВт∙ч (2,90 р./кВт∙ч);
– коэффициент использования по мощности, (0,9).
, (4.16)
р.
где – норматив затрат на текущее техническое обслуживание и ремонт, % (5 %).
, (4.17)
р.
где – коэффициент затрат на вспомогательные расходные материалы, % (1 %).
, (4.18)
р.
где – коэффициент прочих расходов, % (5%).
Таким образом, стоимость разработки программного обеспечения составит:
, (4.19)
р.
В таблице 4.2 представлены экономические показатели проекта.
Таблица 4.2 – Экономические показатели проекта
|
Наименование статьи затрат |
Сумма, руб. |
|
1.Материалы |
230 |
|
2.Заработная плата в том числе: а) основная б) дополнительная в) отчисления на социальные нужды |
30183 20125 3018 7040 |
|
3.Накладные расходы |
4025 |
|
4.Оплата машинного времени |
1584 |
|
Итого себестоимость ПО |
36022 |
В этом разделе произведён расчёт себестоимости разработки программного обеспечения импульсного регулятора тока и напряжения, однако, специфика использования данного устройства не позволяет сделать расчёт экономической эффективности от его внедрения, так как это устройство предназначено для учебных и научных целей.
5. Безопасность труда
5.1 Анализ и обеспечение безопасных условий труда
Целью раздела является проверка состояния безопасности труда в лаборатории “Промышленной электроники и информационно-вычислительной техники” университета. Лаборатория оснащена одним ПЭВМ типа “IBM PC”. Питание лабораторного оборудования производится от сети напряжения 220 В. Электропитание и заземление выполнены по правилам ПУЭ. Схема электроснабжения лаборатории представлена на рисунке 1
1 – окно;
2 – стол с ВДТ;
З – стойка с ПЭВМ;
4 – розетка;
5 – стул;
6 – шкаф;
7 – дверь входная;
Рисунок 1 – Схема электроснабжения лаборатории
Несоблюдение правил организации труда приводит к преждевременному утомлению из-за перенапряжения отдельных органов, нерационального чередования движений, монотонности выполняемой работы. Неправильное цветовое и архитектурное решение интерьера вызывают отрицательные эмоции. Наконец, наличие опасностей, когда у человека нет уверенности в обеспечении безопасности во время работы, отвлекает, нервирует и утомляет.
Оценка условий труда на рабочих местах при паспортизации, аттестации рабочих мест проводится в соответствии с требованиями СанПиН 2.2.2/2.4.1340-03 « Гигиенические требования к персональным электронно-вычислительным машинам и организации работы» и предусматривает комплексную оценку вредности факторов производственной среды и тяжести работ в баллах по степени отклонения фактических параметров производственной среды и трудового процесса от действующих гигиенических нормативов
В помещении лаборатории на оператора могут негативно действовать следующие физические факторы, которые могут привести к ухудшению самочувствия:
-повышенная и пониженная температура воздуха;
-повышенная и пониженная влажность воздуха;
-недостаточная освещенность рабочего места;
-превышающий допустимые нормы шум;
-повышенный уровень ионизирующего излучения;
-повышенный уровень электромагнитных полей;
-повышенный уровень статического электричества;
-опасность поражения электрическим током;
-блеклость экрана дисплея.
К опасным химическим факторам, постоянно действующим на оператора, относится образование активных частиц в результате ионизации воздуха при работе компьютера и чрезмерная запыленность и загазованность воздуха.
Биологические вредные и опасные производственные факторы в данном помещении отсутствуют.
К вредным психофизиологическим факторам, воздействующим на оператора в течение его рабочей смены, можно отнести следующие:
нервно – эмоциональные перегрузки;
умственное напряжение;
перенапряжение зрения.
Для эффективной, плодотворной работы операторов, для повышения работоспособности и укрепления их здоровья, необходимо приведение перечисленных выше факторов в оптимальное или допустимое состояние.
Длительность работы на ЭВМ определяется сложностью заданий и техническими данными терминала (разрешающей способностью и частотой кадровой развертки), характером выполняемых работ (ввод данных, редактирование текстов и прочее).
Микроклимат в рабочей зоне определяется действующими на организм человека сочетаниями температуры, влажности и скорости движения воздуха, а также температурой окружающих поверхностей. Оптимальными считаются такие сочетания параметров микроклимата, которые при длительном воздействии на человека обеспечивают сохранение нормального функционального и теплового состояния организма без напряжения его физиологических способностей к терморегуляции, что создает ощущение теплового комфорта и является для высокой работоспособности.
Важным фактором нормального высокопроизводительного труда являются метеорологические условия в производственном помещении. При измерениях температуры, относительной влажности воздуха в помещениях, где установлены компьютеры, оргтехника, получились такие результаты. Температура в теплый период года колеблется от 21 до 25 °C, в холодный период года от 21 до 23 °C. Относительная влажность колеблется от 41 % до 55 % в холодный период и от 42 % до 62 % в теплый период года, скорость движения воздушных масс не превышает 0,1 м/с. Эти параметры температуры и влажности удовлетворяют нормам СанПиН 2.2.4.548-96 «Гигиенические требования к микроклимату производственных помещений» и находятся в допустимых пределах (температура от 19 до 24 °C зимой, от 20 до 28 °C летом; влажность от 40 % до 60 %; скорость движения воздуха 0,1 м/с.)
Лаборатория расположена на нейтральной стороне по отношению к солнцу.
Для обеспечения комфортной работы преподавателей, студентов и лаборантов в лаборатории необходимым фактором является освещенность. В лаборатории используется искусственное и естественное освещение. На уровень освещенности лаборатории оказывает влияние цветовая отделка интерьера и оборудования, их отражающая способность.
Освещённость. Естественное освещение осуществляется через светопроемы, при этом коэффициент естественной освещенности (КЕО) не ниже 1,2 %. А допустимые значения по СНиП 23-05-95 “Естественное и искусственное освещение” должно быть 2,3 % в зонах с устойчивым снежным покровом.
Освещенность на поверхности стола в зоне размещения рабочего документа составляет около 150 лк, что не удовлетворяет нормам СНиП 23-05-95 “Естественное и искусственное освещение“ (норма 300 - 500 лк). В качестве источников света при искусственном освещении применяются люминесцентные лампы типа ЛБ.
Разница (называемая отношением яркости) между рабочим местом и примыкающей площадью не превышает соотношение 3:1. Коэффициенты отношения поверхностей следующие:
- для потолка 80 – 95 %;
- для стен 50 –60 %;
- для мебели и машин 25 – 45 %;
- для пола 25 –45 %.
Рациональное искусственное освещение должно отвечать следующим требованиям: быть достаточным по уровню освещенности и по размерности освещения; обеспечивать правильный выбор источников света; иметь рациональное распределение света в помещении. Норма освещенности для помещения – 400 люкс.
К дополнительным характеристикам рабочего места относятся следующие. Площадь на одно рабочее место с ВДТ или ПЭВМ для взрослых пользователей составляет не менее 6,0 м2, а объем не менее 20,0 м3, что удовлетворяет нормам.
Поверхность пола в помещениях эксплуатации ВДТ и ПЭВМ ровная, без выбоин, нескользкая, удобная для очистки и влажной уборки, обладает антистатическими свойствами.
Для работы использован монитор, удовлетворяющие стандартам MPR, MPR-2, TCO-92, TCO-95, TCO-99, а также стандарту Energy Star. Монитор применяется с покрытием против бликов и с антистатическим покрытием ЭЛТ. Оргтехника, обладающая слишком высоким уровнем шума (свыше 70 дБ), не используется.
Электрическая изоляция токоведущих частей электроустановок от частей, находящихся под иным потенциалом, в том числе от земли, необходима не только для нормальной работы установки, но и для безопасности людей. Изоляция проводов и кабелей предотвращает прикосновение к токоведущим жилам. Кроме того, в электрический сети через человека, прикоснувшегося к одной из токоведущих жил, течет тем меньшей ток, чем лучше изоляция двух других жил от земли.
Если какой-либо точке любого провода произойдет повреждение изоляции, то возникающее электрические соединение с землей в сети с изолированной нейтралью, называется однофазным замыканием на землю, такое соединение с землей не является коротким замыканием, потому что на пути тока от провода с поврежденной изоляцией к токоведущим жилам проводов других фаз будет сопротивление этих двух проводов относительно земли. Ток однофазного замыкания в сети с изолированной нейтралью значительно меньше тока короткого замыкания между проводами или между проводами и землей в сети заземленной нейтралью. Если замыкание на землю произойдет через тело человека, то в сети с изолированной нейтралью ток через человека будет значительно меньше, чем в сети с заземленной нейтралью.
В установках напряжением до 1000 В сети с изолированной нейтралью безопаснее сетей с заземленной нейтралью только при условии хорошей изоляции фаз относительно земли и сравнительно небольшой протяженности сети, так как чем длиннее провода, тем больше значение емкостных токов и токов утечки.
Изоляции силовой или осветительной электропроводки считается достаточной, если ее сопротивление между проводом каждой фазы и землей, или между разными фазами на участке, ограниченном последовательно включенными установочными автоматами или плавкими предохранителями или за последним предохранителем составляет не менее 0,5 МОм (500 000 Ом).
Основными элементами любого компьютера являются системный блок, дисплей (монитор), клавиатура, размещаемые на плоскости рабочего стола.
По данным отечественных исследователей, в районе дисплея могут образовываться электромагнитные поля радиочастот (диапазон 5-10 МГц), создаваемые системой модуляции электронного луча. Но наиболее высокая их напряженность (сотни В/м) фиксируется на расстоянии 10-15 см от боковых, верхних и задних поверхностей дисплея, а у экрана и клавиатуры на расстоянии 30-70 см, где находится оператор, значения напряженности электромагнитных излучений не превышают единиц В/м, что ниже нормируемых предельно допустимых уровней для данного диапазона частот (30 В/м).
В районе компьютера фиксируются также импульсные поля сверхнизкой (50-100 Гц) и низкой (15-53 кГц) частот, создаваемые системой вертикальной и горизонтальной развертки электронного луча. Так, напряженность, низкочастотных полей может колебаться от единиц до десятков А/м.
Напряженность электростатического поля может колебаться от единиц до десятков кВ/м, приводя к изменению ионизации воздуха в помещениях. Ионизирующая радиация, вероятно, не играет существенной биологической роли, в частности, мягкое рентгеновское излучение по величине не выходит за пределы радиационного фона помещений.
Допустимые значения параметров неионизирующих электромагнитных излучений приведены ниже (СанПиН 2.2.4.1191-03):
- напряженность электромагнитного поля по электрической составляющей на расстоянии 50 см - 10 В/м;
- напряженность электромагнитного поля по магнитной составляющей на расстоянии 50 см - 0,3 А/м;
- напряженность электростатического поля не должна превышать для взрослых пользователей - 20 кВ/м, а для детей дошкольных учреждении и учащихся средних специальных и ВУЗов - 15 кВ/м;
- напряженность электромагнитного поля на расстоянии 50 см вокруг ВДТ по электрической составляющей должна быть не более25 В/м (в диапазоне частот 5 Гц-2 кГц) и не более 2,5 В/м (в диапазоне частот 2 кГц-400 кГц).
В современных ЭВМ очень высокая плотность размещения элементов электронных схем. В непосредственной близости друг от друга располагаются соединительные провода, коммутационные кабели. При протекании по ним электрического тока выделяется значительное количество теплоты. При этом возможно оплавление изоляции, соединительных проводов, их оголение и, как следствие, короткое замыкание, которое может привести к воспламенению. Для ликвидации пожаров в начальной стадии и своевременной эвакуации людей в лаборатории предусмотрены следующие меры:
- наличие первичных средств тушения пожара (1 огнетушитель ОУ-5, защищаемая площадь 54 м2);
- наличие устройств пожарной автоматики (2 извещателя дымовых ИП-212);
- наличие плана эвакуации.
Лаборатория имеет следующие характеристики:
- категория по взрывопожарной и пожарной опасности лаборатории по НПБ 105-95 – В3;
- класс взрывопожарности по ПУЭ – П-Па;
- степень огнестойкости здания II;
- тип вентиляции – естественная.
Лаборатория оснащена средствами системы пожарной сигнализации: извещателями дымовыми ИП-212. Максимальное расстояние между дымовыми извещателями 8,5 м, от стены до извещателя – 4,5 м при высоте свыше 3,5 до 6 м. Система пожарной сигнализации рассчитана на круглосуточную работу. Шлейфы пожарной сигнализации выведены на концентратор на вахту без права отключения. Шлейфы пожарной сигнализации в защищаемых помещениях выполнены проводом ТРП-1х2х0,5 открыто по стенам и потолкам и проводом МГШВ-0,5 в тросе. Вертикальные спуски выполнены кабелем ТПП-10х2х0,5. Основное и резервное питание концентратора выполнено проводом АППВ-3х2,5 в металлорукаве.
Лаборатория не граничит с помещениями, имеющими повышенные уровни воздушного и ударного шума.
Для предупреждения развития переутомления обязательными условиями являются:
осуществление перерыва после каждого академического часа занятий длительностью не менее 15 минут, независимо от рабочего процесса. С этой целью необходимо к компьютеру подключить таймер;
осуществление во время перерыва физкультурной паузы в течении 3 - 4 минут;
для снятия локального утомления следует обеспечить проведение физкультминуток (в течение 1 - 2 минут), которые могут выполняться в зависимости от появления усталости;
через каждые 20 - 25 минут работы на видеотерминале осуществлять упражнения для глаз.
Для снижения пыли в лаборатории предусмотрены следующие рекомендации:
не входить в помещение в верхней одежде и уличной обуви;
ежедневно перед началом работы проводить влажную уборку и проветривание помещения.
Для равномерного распределения света в помещении рекомендуется использовать полукосвенный или прямой косвенный тип освещения. Необходимо дополнительное освещение в утреннее время суток.
Освещенность на поверхности стола в зоне размещения рабочего документа должна быть 300 - 500 лк. Для этого установлен светильник местного освещения для подсветки документов.
В качестве источников света при искусственном освещении применяются люминесцентные лампы типа ЛБ. При устройстве отраженного освещения в производственных и административно-общественных помещениях применяются металлогалогенные лампы мощностью до 250 Вт. Также применяются лампы накаливания в светильнике местного освещения
Неудобное сидячее положение, дискомфорт от сидячей работы за дисплеями можно уменьшить следующими методами:
- тщательным приспособлением состояния дисплея или объектива к индивидуальными особенностям зрения;
- приспособлением расстояния между глазами и дисплеем и расположения дисплея к конкретному работнику;
- регулировкой общего освещения на рабочем месте до достижения нужного его; качества или обеспечением индивидуального освещения на рабочих местах; таким изменением работы, которое обеспечило бы возможность отдыха после; продолжительных операций, создающих нагрузку на глаза;
- обеспечением таких условий, в которых работники могли бы отдыхать в отдельном помещении с тем, чтобы снять усталость глаз;
- обеспечением регулировки высоты рабочего стула до нужного уровня и удобства сидения.
5.2 Расчет искусственного освещения
Расчет освещения производится для комнаты площадью 63 м2 , ширина которой 7 м, длина 9 м, высота – 4 м и высотой рабочей поверхности – 0,75 м. Число светильников в комнате равно 12, а в каждом светильнике по две лампы. Схема расположения светильников в лаборатории представлена на рисунке 2
Рисунок 2 – Схема расположения светильников в лаборатории
Воспользуемся методом коэффициента использования светового потока, учитывающим световой поток, отраженный от потолка и стен. Световой поток лампы рассчитывается по формуле:
, (1)
где Ф – рассчитываемый световой поток, лм;
ЕН – нормированная минимальная освещенность, лк;
S – площадь освещаемого помещения, м2;
Z – коэффициент неравномерности освещения;
kЗ– коэффициент запаса, учитывающий уменьшение светового потока лампы в результате загрязнения светильников;
N – число светильников, шт;
n – число ламп в светильнике, шт;
u –коэффициент использования светового потока.
Коэффициент неравномерности z зависит от светораспределения светильников и их расположения в пространстве. Он учитывает, что в реальных условиях неизбежна некоторая неравномерность освещения поверхности. При расположении светильников близком к наилучшему, его можно принять .
Коэффициент запаса kЗ учитывает снижение освещенности из-за загрязнения и старения лампы. Так как будут использованы люминесцентные лампы в помещениях, при запыленности менее 5 мг/м3, .
Для определения коэффициента использования светового потока находится индекс помещения и предположительно оцениваются коэффициенты отражения поверхностей помещения: потолка -, стен -, стола -.
Для данного помещения %, %, %.
Индекс помещения находится по формуле:
, (2)
где Нр - высота подвеса светильника над расчетной поверхностью, м;
А – ширина помещения, м;
В – длина помещения, м.
Подставив значения, получим:
Зная индекс помещения , и , по таблице находим .
Подставим все значения в формулу для определения светового потока:
(лм).
Тип люминесцентных ламп выбираем среди следующих вариантов согласно ГОСТ 6825-91 «Лампы люминесцентные трубчатые для общего освещения»:
- лампа ЛБ-40, световой поток 2800 лм;
- лампа ЛБ-65, световой поток 4600 лм;
- лампа ЛБ-80, световой поток 5200 лм.
По рассчитанному значению Ф выбираем лампу типа ЛБ, мощностью 65 Вт.
Вывод: согласно проведенным расчетам для обеспечения на рабочем месте нормативной освещенности необходимо использовать люминесцентные лампы типа ЛБ, мощностью 65 Вт.
5.3 Возможные чрезвычайные ситуации
В соответствии с ГОСТ Р 22.0.02 – 94 приняты следующие определения.
Чрезвычайная ситуация (ЧС) – состояние, при котором в результате возникновения источника чрезвычайной ситуации на объекте, определенной территории или акватории нарушаются нормальные условия жизни и деятельности людей, возникает угроза их жизни и здоровью, наносится ущерб имуществу населения, народному хозяйству и окружающей природной среде.
Источник ЧС – опасное природное явление, авария или опасное техногенное происшествие, широко распространенная инфекционная болезнь людей, сельскохозяйственных животных и растений, а также применение современных средств поражения, в результате чего произошла или может возникнуть ЧС.
Безопасность в ЧС – состояние защищенности населения, объектов народного хозяйства и окружающей природной среды от опасностей в ЧС.
Защищенность в ЧС – состояние, при котором предотвращают, преодолевают или предельно снижают негативные последствия возникновения потенциальных опасностей в ЧС для населения, объектов народного хозяйства и окружающей природной среды.
Зона ЧС – территория или акватория, на которой в результате возникновения источника ЧС или распространения его последствий из других районов возникла зона ЧС.
Причинами возникновения ЧС являются: стихийные бедствия, техногенные аварии и катастрофы, антропогенные катастрофы, применение средств массового поражения и т.д.
Недалеко от учебных 14 и 15 корпусов ОГУ проходит железная дорога. На расстоянии R=750 м от корпусов железную дорогу пересекает автотрасса – где наиболее велик риск возникновения ЧС, при котором возможно столкновение товарного поезда, перевозящего аварийно химически опасные вещества (АХОВ), с автотранспортом.
5.3.1 Расчет времени эвакуации сотрудников лаборатории при пожаре
Также наиболее вероятной чрезвычайной ситуацией в лаборатории может быть пожар. Для организаций, оснащенных вычислительной техникой, наиболее частые причины возникновения пожаров - причины электрического характера:
- короткие замыкания, перегрузки, искрения от нарушения изоляции, что приводит к нагреванию проводников до температуры воспламенения изоляции;
- электрическая дуга, возникающая между контактами коммутационных аппаратов, не предназначенных для отключения больших токов нагрузки;
- неудовлетворительные контакты в местах соединения проводов и их сильный нагрев вследствие большого переходного сопротивления при протекании электрического тока;
- искрение в электрических аппаратах и машинах, а также искрение в результате электростатических разрядов и ударов молнии;
- неисправность (замыкания) в обмотках электрических машин при отсутствии надлежащей защиты.
В связи с большой пожароопасностью необходимо применять профилактические меры. Пожарная профилактика при эксплуатации электронных приборов и устройств заключается в следующих мероприятиях:
- поддержания сопротивления изоляции токоведущих частей не ниже величин, регламентированных правилами техники безопасности;
- защите изоляции от теплового, механического и агрессивного воздействия окружающей среды посредством прокладки проводов в трубах, исключении повреждения изоляции проводов и кабелей от вибрации, тряски и при движении;
- защита открытых токоведущих частей (ограждениями) от попадания на них посторонних предметов;
- устройство механических и электрических блокировок для исключения ошибочных действий при выполнении оперативных переключений.
Для предотвращения пожаров должны строго соблюдаться правила пожарной безопасности. Необходимо тщательно проверять состояние контактов, так как ослабление контактов в местах присоединения может привести к местному нагреву, а затем к нагреву провода и к нагреву изоляции выше допустимых температур. Особое внимание следует обращать на временные электропроводки, которые часто плохо изолируются в местах соединения, подвергаются скручиванию и ударам, что нарушает изоляцию проводов, и вызывает короткое замыкание. Надежность работы радиоэлектронных изделий гарантируется только в определенных интервалах температуры, влажности, тока и напряжения. Из-за возможных отклонений электрических и климатических параметров эти изделия являются нередко источниками открытого пламени и высоких температур. Причиной этого является небрежное исполнение радиотехнических изделий с элементами нарушения правил пожарной безопасности.
Для ликвидации начинающихся очагов пожара силами персонала помещения должны быть обеспечены по действующим нормам (НПБ 105-95) первичными средствами пожаротушения, пожарным ручным инструментом и пожарным инвентарем. Для тушения электроустановок под напряжением до 1 кВ необходимо применять углекислотные (ОУ-2, ОУ-5, ОУ-8), углекислотно-бромэтиловые огнетушители (ОУБ-3, ОУБ-7) или порошковые огнетушители (ОП-3, ОП -5), так как струя не электропроводна.
Необходимо оборудовать помещения охранно-пожарной сигнализацией, извещающей органы пожарной охраны о пожаре и месте его возникновения – обеспечивается автоматической (нажатием кнопки) пожарной сигнализацией, а также при помощи телефонной связи.
В соответствии с требованиями НПБ 105-95 в здании предусмотрена автоматическая система оповещения людей о пожаре по второму типу. Запуск средств оповещения должен происходить автоматически при срабатывании любого пожарного извещателя. Система оповещения людей при пожаре должна быть рассчитана на круглосуточную работу, и обеспечить оповещение всех одновременно во всех местах постоянного и временного пребывания людей.
Шлейфы системы оповещения выполнены проводом при открытой параллельной прокладке, расстояние между проводами шлейфов сигнализации, силовыми и осветительными приборами не менее 0,5 м. План эвакуации людей при пожаре представлен на рисунке 3.
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||
|
|||||||||
Рисунок 3 – План эвакуации людей с третьего этажа 15 корпуса из аудитории 15315
Возможные причины возникновения пожара:
- работы с открытым огнем без соблюдения правил пожарной безопасности;
- курение в неустановленных местах;
- неисправность электрической проводки;
- неисправность приборов и оборудования, питаемых от сети, и нарушение правил эксплуатации;
- неисправность защитного заземления;
- неисправность молниезащиты.
Эвакуация сотрудников лаборатории в случае возникновения пожара или при возникновении другой чрезвычайной ситуации производится в соответствии с планом эвакуации. Процесс движения людей в силу угрожающей им опасности инстинктивно начинается одновременно в одном направлении - в сторону выходов. Это приводит к тому, что проходы быстро заполняются людьми определенной плотности потоков. Показателем эффективности процесса вынужденной эвакуации является время, в течение которого люди могут при необходимости покинуть отдельные помещения и здание в целом. При расчете весь путь движения людского потока подразделяется на участки (проход, коридор, дверной проем, лестница, тамбур). Далее происходит выход людей из здания и рассеивание.
Расчетное время эвакуации людей из помещений и зданий устанавливается по расчету времени движения одного или нескольких людских потоков. Расчет ведется в соответствии с ГОСТ 12.1.004-91. При расчете путь движения людского потока делится на участки длинной li и шириной bi. Расчетное время эвакуации людей Т, мин определяется по формуле:
(3)
где ti – время движения людского потока на i-м участке, мин;
n – количество участков эвакуации.
Плотность людского потока Di, чел/м2 на i-м участке пути определяется по формуле:
, (3)
где Ni - число людей на i-м участке;
f – средняя площадь горизонтальной проекции человека, м2 (f=0,125 м2);
li – длина i-го участка, м;
bi – ширина i-го участка, м.
Время движения на участке пути ti, мин следует определять по формуле:
ti=li/vi , (4)
где vi – значение скорости движения людского потока на участке в зависимости от Di (по таблице 1).
Таблица 5.1 – Значение скорости движения людского потока на участке в зависимости от плотности потока
|
Плотность потока, D,чел/м2 |
Горизонтальный путь |
Дверной проем |
Лестница вниз |
||
|
Скорость, v, м/мин |
Интенсивность, q, чел/мин |
Интенсивность, q, чел/мин |
Скорость, v, м/мин |
Интенсивность, q, чел/мин |
|
|
0,01 |
100 |
1 |
1 |
100 |
1 |
|
0,05 |
100 |
5 |
5 |
100 |
5 |
|
0,1 |
80 |
8 |
8,7 |
95 |
9,5 |
|
0,2 |
60 |
12 |
13,4 |
68 |
13,6 |
|
0,3 |
47 |
14,1 |
16,5 |
52 |
16,6 |
|
0,4 |
40 |
16 |
18,4 |
40 |
16 |
|
0,5 |
33 |
16,5 |
19,6 |
31 |
15,6 |
|
0,6 |
27 |
16,2 |
19,0 |
24 |
14,4 |
|
0,7 |
23 |
16,1 |
18,5 |
18 |
12,6 |
|
0,8 |
19 |
15,2 |
17,3 |
13 |
10,4 |
|
0,9 и более |
15 |
13,5 |
8,5 |
8 |
7,2 |
Результаты расчета времени эвакуации людей сведены в таблицу 2.
Таблица 5.2 – Результаты расчета времени эвакуации людей
|
Участок |
Длина, li, м |
Ширина, bi, м |
Число людей, Ni |
Плотность потока, Di, чел/м2 |
Интенсивность, qi, чел/мин |
Скорость, vi, м/мин |
Время, ti, мин |
|
1 |
9 |
9 |
11 |
0,017 |
1 |
58,8 |
0,15 |
|
2 |
6 |
3 |
44 |
0,305 |
14,1 |
46,2 |
0,13 |
|
3 |
6 |
6 |
46 |
0,159 |
10 |
62,8 |
0,01 |
|
4 |
15 |
3 |
46 |
0,127 |
9 |
70,8 |
0,21 |
|
5 |
24 |
2 |
46 |
0,12 |
8,8 |
73,3 |
0,32 |
Расчетное время эвакуации людей:
Т = 0,15 + 0,13 + 0,095 + 0,21 + 0,32 = 0,905 мин.
Таким образом, расчетное время эвакуации из помещения составляет 0,905 мин или 54,3 сек. Время эвакуации по лестничным маршам не должно превышать 5 мин, а время эвакуации из помещения между лестничными клетками 1 мин. Расчетное время не превышает допустимого.
Заключение
В ходе данного дипломного проектирования был разработан алгоритм и написана программа управления импульсным источником током и напряжении, программа написана на языке С для МК Atmega 8.
Список использованных источников
- Белов, А. В. Микроконтроллеры AVR в радиолюбительской практике [Текст] / А. В. Белов. – СПб.: Наука и Техника, 2007. – 352 с.
- Трамперт, В. Измерение, управление и регулирование с помощью AVR – микроконтроллеров [Текст] / В Трамперт. – К.: «МК-Пресс», 2006. – 208 с.
- Евстифеев, А. В. Микроконтроллеры AVR семейства Mega. Руководство пользователя [Текст] / А.В. Евстифеев. – М.: «Додэка - XXI», 2007. – 592 с.
- Шпак, Ю. А. Программирование на языке Си для AVR и PIC микроконтроллеров [Текст] / Ю. А. Шпак. – К.: «МК-Пресс», 2006. – 400 с.
- Акулова, А. Ш. Расчет экономического эффекта от внедрения разработанного устройства[Текст] / А. Ш. Акулова. – «ПРЕССА», 2008. – 21 с.
- Белов, С. В. Безопасность жизнедеятельности [Текст] / С. В. Белов, А.Ф. Козьяков. – М.: Высшая школа, 2004. – 342 с.
Приложение А
(обязательное)
Листинг программы
#include <mega8.h>
case 0x88: S1=1;S0=0; //lim
Tau_E=Tau_IOgr;K_E=KIOgr;
TCNT0=0xBC;TIMSK=0x01;
TWCR|=0x80;return;
default: TWCR|=0x80; //сбросфлага
}
ADC_1=ADC_0; //как в качестве предыдущего для следующего отчета
ADC_0+=TEMP;//nx=nx+dnx
if (ADC_0<0)
{
{
DDRB=0xFF;
DDRC=0x00;
DDRD=0xFF;
PORTC=0xF0;
PORTD=0x03;//режим стоп по умолчанию
}
void PWI_INIT()
{
TCCR1A=0x01;
TCCR1B=0x09;
TCNT1H=0x00;
TCNT1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
}
void main(void)
{
#asm("cli");
INIT_PORTS();
RDY=0;
ADC_Init();
TWI_INIT();
PWI_INIT();
Tau_U=ETau_U; //временная инициализация
Tau_Iz=ETau_Iz;
Tau_IOgr=ETau_IOgr;
KU=EKU;
KIz=EKIz;
KIOgr=EKIOgr;
TCCR0=0x02;
RDY=1;
#asm("sei");
while (1);
}
Приложение Б
(обязательное)
Загрузочный код программы
********************************
:1000CA006801E0936B01E0916C01D2D023C0E4385F
:1000DA0051F49198909AE0916901E0936B01E09153
:1000EA006D01C6D017C0E83851F4919A9098E09102
:1000FA006A01E0936B01E0916E01BAD00BC0B2D0F5
:10010A0002C0E03A09F4AED0E0916601A0E0B0E0A6
:10011A00F6D0A8D0E991EFBFE991B991A991999147
:10012A00899118950A92AA93BA93EA93FA93EFB728
:10013A00EA93E4B1F5B1A2D0A0916201B091630152
:10014A00A2D0EA1BFB0BA4D0E0916B01EF77E093FE
:10015A007001E0916F01EF77E0937101A0916B015B
:10016A00A0301CF49AD0B6D093D0A0916B01A130E4
Чертежи:
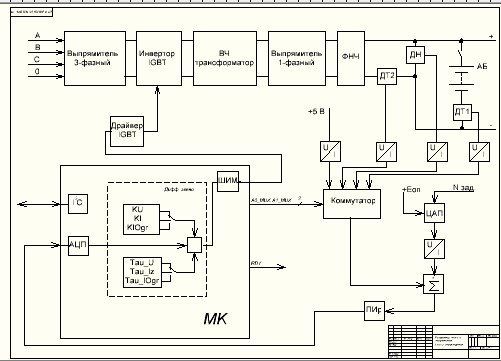
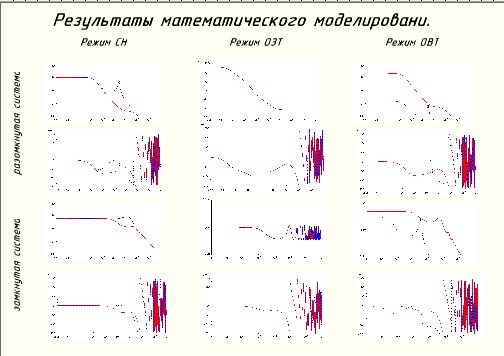
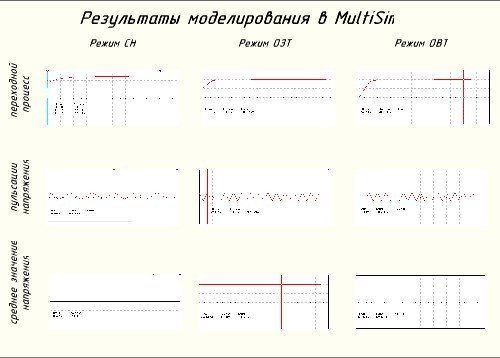
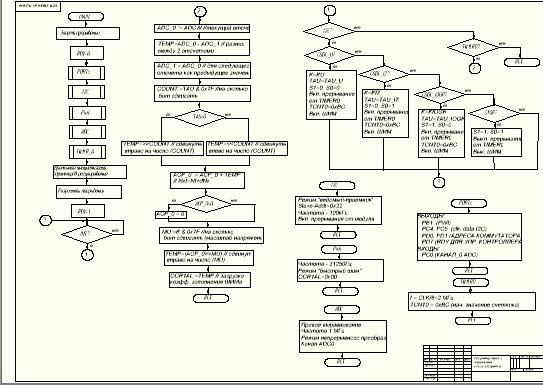
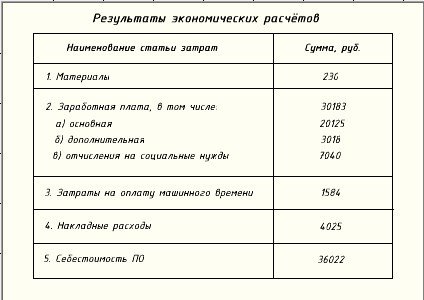
Скачать: