КУРСОВОЙ ПРОЕКТ
Автоматизация установки пиролиза изношенных шин с теплообменниками в реакторе и питающем бункере
Аннотация
Пояснительная записка содержит 55 страниц, в том числе 11 источников. Графическая часть выполнена на 5 листах формата А1.
В работе рассматривается автоматизации установки пиролиза изношенных шин с теплообменниками в реакторе и питающем бункере.
В данном проекте на первом листе А1 приведена функциональная схема автоматизации установки пиролиза изношенных шин с теплообменниками в реакторе и питающем бункере. схема На втором листе А1 представлен блок нормализации сигналов от датчиков и ввода их в УВМ. На третьем листе А1 представлен блок микропроцессора системы управления. На четвертом листе А1 представлен блок клавиатуры индикации и формирования вектора прерывания. На пятом листе А1 представлено устройство вывода сигнала на ИМ.
Содержание
Введение........................................................................................................... 5
1 Технологический процесс автоматизации установки пиролиза изношенных шин с теплообменниками в реакторе и питающем бункере....................................... 6
2 Краткая характеристика существующих схем автоматизации...................... 7
3 Обоснование необходимой структуры: автоматизации установки пиролиза изношенных шин с теплообменниками в реакторе и питающем бункере
4 Описание разработанной функциональной схемы автоматизации: ........... 10
установки пиролиза изношенных шин с теплообменниками в реакторе и питающем бункере........................................................................................................... 12
5 Блок нормализации сигналов от датчиков и ввода их в УВМ..................... 15
6 Блок микропроцессора СУ.......................................................................... 25
7 Блок клавиатуры, индикации и формирования векторов прерывания........ 38
8 Устройство вывода сигналов на исполнительные механизмы, графопостроитель и печать 46
9 Алгоритмы и циклограммы, функционирование автоматизированного участка 49
Выводы........................................................................................................... 53
Список используемых источников................................................................. 54
Приложение А
Введение
Автоматизация технологических процессов является одним из решающих факторов повышения производительности и улучшения условий труда. Все существующие и строящиеся промышленные объекты в той или иной степени оснащаются средствами автоматизации. При массовом производстве изделий особенно актуальна автоматизация сборки.
В настоящее время на промышленных предприятиях при автоматизации технологических процессов и объектов широко используются микропроцессорные комплексы. Это связано с рядом положительных особенностей микропроцессоров как элементов управляющих устройств систем автоматизации, основными из которых являются программируемость и относительно большая вычислительная мощность, сочетающиеся с достаточной надёжностью, малыми габаритными размерами и стоимостью.
В курсовом проекте приведены функциональная схема автоматизации контроля герметичности изделий газом компенсационным способом с использованием вибрации и схемы модулей, устройств и отдельных фрагментов микропроцессорной систем управления технологическим процессом. Это составляет основную часть микропроцессорной системы управления.
Рассматриваемые микропроцессорные схемы позволяют автоматизировать различные технологические процессы или объекты. В зависимости от производственной целесообразности для технологического процесса или объекта автоматизации выбирается необходимое количество систем местного и дистанционного контроля, систем регулирования, управления, сигнализации и диагностирования при нормальной работе оборудования и при плановом или аварийном его запуске и остановке.
Модули и блоки, рассматриваемые в курсовом проекте, согласованы для работы в комплекте с микропроцессором КР580ИК80А. Однако почти все схемы этих модулей и блоков могут использоваться при разработке системы управления с использованием микропроцессоров КР1810ВМ86, микроЭВМ КМ1816ВМ48 и др. Кроме того, все используемые в системе отечественные микросхемы имеют свои зарубежные аналоги, отличающиеся иногда даже лучшими характеристиками, в частности по быстродействию и надежности.
1 Автоматизация контроля установки пиролиза изношен-
ных шин с теплообменниками в реакторе и питающем
бункере
Работа системы автоматизированного контроля установки пиролиза изношенных шин с теплообменниками в реакторе и питающем бункере, представленной на первом листе графического материала курсового проекта. Схема содержит: бункер 1 загрузки изношенных шин, обогреваемый бункер 2, теплообменник 3 подогрева атмосферного воздуха, подаваемого в топку реактора, дымовыми газами, отводимыми в атмосферу, вентилятор 4 отвода дымовых газов в атмосферу, датчик 1а уровня изношенных шин в обогреваемом бункере 2, конвейер скребковый 5, вентилятор 7 отвода пиролизного газа из верхней части реактора 20, конденсатор 19 жидкостной фракции из пиролизного газа, , вентиль 8 подачи пиролизного газа внешним потребителям, заслонку 6 загрузки изношенных шин в реакторе 20, датчик 2а уровня изношенных шин в реакторе, заслонки регулирующие 9,13,16, датчик 10а расхода пиролизного газа, отводимого из верхней части реактора, теплообменник 10, установленный внутри реактора для нагревания крошки изношенных шин, труба 11 в виде кольца с отверстиями в верхней части для подвода рециркулируемого газа в крошку изношенных шин и расположения ниже теплообменника 10, топку 12 для сжигания части рециркулируемого газа с подачей продуктов горения в теплообменник 10, вентиль 14 для отвода жидкостной фракции пиролиза изношенных шин в реакторе, датчик температуры 7а крошки изношенных шин в реакторе, реактор 20 пиролиза изношенных шин, датчик 8а давления пиролизного газа в реакторе, датчик 3а концентрации твердого остатка пиролиза в нижней части реактора, труба 15 в виде кольца с отверстиями в верхней части для подвода рециркулируемого газа в крошку изношенных шин и расположенная в нижней части реактора, шнековый конвейер 17, заслонку 18 выгрузки твердого остатка пиролиза изношенных шин из реактора.
2 Краткая характеристика существующих схем
автоматизации
Существующие схемы автоматизации включают в себя следующие:
структурные, функциональные и принципиальные.
Структурная схема автоматизации.
При разработке проекта автоматизации в первую очередь необходимо решить, с каких мест те или иные участки объекта будут управляться, где будут размещаться пункты управления, операторские помещения, какова должна быть взаимосвязь между ними, то есть необходимо решить вопросы выбора структуры управления. Под структурой управления понимается совокупность частей автоматической системы, на которые она может быть разделена по определенному признаку, а также пути передачи воздействий между ними. Графическое изображение структуры управления называется структурной схемой.
На структурной схеме отображаются в общем виде основные решения проекта по функциональной, организационной и техническим структурам автоматизированной системы управления технологическими процессами (АСУ ТП) с соблюдением иерархии системы и взаимосвязи между пунктами контроля и управления, оперативным персоналом и технологическим объектом управления. Принятые при выполнении структурной схемы принципы организации оперативного управления технологическим объектом, состав и обозначения отдельных элементов структурной схемы должны сохраняться во всех проектных документах на АСУ ТП, в которых они конкретизируются и детализируются.
На структурной схеме показываются:
а) технологические подразделения автоматизируемого объекта (отделения, участки, цехи);
б) пункты контроля и управления (местные щиты, операторские и диспетчерские пульты и т.д.);
в) технологический персонал и специализированные службы, обеспечивающие оперативное управление и нормальное функционирование технологического объекта;
г) основные функции и технические средства, обеспечивающие их реализацию в каждом пункте контроля и управления;
д) взаимосвязь подразделений технологического объекта, пунктов контроля и управления и технологического персонала между собой и с вышестоящей системой управления.
Функциональная схема автоматизации.
Функциональная схема является основным техническим документом, определяющим функционально-блочную структуру отдельных узлов автоматического контроля, управления и регулирования технологического процесса и оснащения объекта управления приборами и средствами автоматизации.
При разработке функциональных схем автоматизации технологических процессов необходимо решить следующее:
- получение первичной информации о состоянии технологического процесса и оборудования;
- непосредственное воздействие на технологический процесс для управления им;
- стабилизация технологических параметров процесса;
- контроль и регистрация технологических параметров процессов и состояния технологического оборудования.
Указанные задачи решаются на основании анализа условий работы технологического оборудования, выявленных законов и критериев управления объектом, а также требований, предъявляемых к точности стабилизации, контроля и регистрации технологических параметров, к качеству регулирования и надежности.
Технологическое оборудование при разработке функциональных схем должны изображаться упрощенно, без указания отдельных технологических аппаратов и трубопроводов вспомогательного назначения. Однако изображенная таким образом технологическая схема должна давать ясное представление о принципе ее работы и взаимодействии со средствами автоматизации.
Приборы и средства автоматизации показываются в соответствии с
ГОСТами.
Принципиальные электрические схемы.
Принципиальные электрические схемы определяют полный состав приборов, аппаратов и устройств (а также связи между ними), действие которых обеспечивает решение задач управления, регулирование, защиты, измерения и сигнализации. Принципиальные схемы служат основанием для разработки других документов проекта: монтажных таблиц щитов и пультов, схем внешних соединений и др.
Эти схемы служат также для изучения принципа действия системы, они необходимы при производстве наладочных работ и в эксплуатации.
При разработке систем автоматизации технологических процессов принципиальные электрические схемы обычно выполняют применительно к отдельным самостоятельным элементам, установкам или участкам автоматизируемой системы.
Принципиальные электрические схемы управления, регулирования, измерения, сигнализации, питания, входящие в состав проектов автоматизации технологических процессов, выполняют в соответствии с требованиями ГОСТов по правилам выполнения схем, условным графическим обозначениям, маркировке цепей и буквенно-цифровым обозначениям элементов схем.
3 Обоснование необходимой структуры: автоматизации
контроля установки пиролиза изношенных шин с тепло-
обменниками в реакторе и питающем бункере
Рациональное управление и совершенствование процессов и проведение их в режимах, близких к оптимальному, невозможно осуществить без автоматизации этих процессов.
Однако определение экономического оптимума при наличии ряда технологических ограничений и переменных условий производства (способа и типа сборки) представляет чрезвычайно трудную задачу. Варианты схем автоматизации необходимо выбирать в зависимости от вида производства, конфигурации и габаритных размеров собираемых изделий и т.д.
Применяя средства автоматизации, широко используемые в отечественной промышленности, существует возможность полностью автоматизировать весь процесс сборки, включая и такие вспомогательные операции, как загрузка составных частей и транспортировка их к месту сборки. Эта задача достигается применением при автоматизации процесса сборки микропроцессорной вычислительной техники. Широкий набор аппаратных средств и богатый опыт создания микропроцессорных систем автоматического управления позволяют в полной мере автоматизировать сборку изделий.
Достоинства микропроцессорных систем управления:
1) многократно увеличивается объем информации об объекте управления;
2) управление с микропроцессорной системы управления производится по вычисляемым параметрам, а не по отдельным параметрам, по сложным алгоритмам управления;
3) улучшается качество управления по точности, по быстродействию, увеличивается устойчивость системы;
4) функциональная схема автоматизации с использованием МСУ является фактически одной системой управления, которая содержит множество подсистем;
5) существует возможность подключения МСУ к ЭВМ высшего ранга.
При разработке функциональной схемы автоматизации вся система разбивается на ряд подсистем в зависимости от выполняемой функции.
Различают подсистемы местного, дистанционного контроля, сигнализации и управления.
В данном курсовом проекте необходимо разработать автоматический контроль установки пиролиза изношенных шин с теплообменниками в реакторе и питающем бункере. Требуется предусмотреть в проекте:
- систему автоматического управления давлением и амплитудой переменного давления в реакторе путем изменения подвода рециркулируемых газов в нижнюю часть этого реактора;
- систему автоматического регулирования уровня материала в реакторе;
- систему автоматического управления выгрузкой твердого остатка пиролиза из нижней части реактора;
- систему автоматического регулирования температуры пиролиза изношенных шин в реакторе путем изменения подвода части пиролизного газа в топку;
- систему автоматического регулирования уровня материала в обогреваемом бункере;
- систему автоматического контроля расхода пиролизных газов, выходящих из верхней части реактора и динамического расхода рециркулируемых газов в реакторе;
4 Описание разработанной функциональной схемы
автоматизации контроля установки пиролиза изношен-
ных шин с теплообменниками в реакторе и питающем
бункере
На первом листе графического материала курсового проекта показана
схема автоматизации контроля установки пиролиза изношенных шин с теплообменниками в реакторе и питающем бункере, которая содержит:
1 – бункер загрузки изношенных шин;
2 – обогреваемый бункер;
3 – теплообменник;
4 – вентилятор отвода дымовых газов в атмосферу;
5 – конвейер скребковый;
6 – заслонка загрузки изношенных шин в реактор;
7 –вентилятор отвода пиролизного газа из верхней части реактора 20;
8 – вентиль подачи пиролизного газа внешним потребителям;
9, 13, 16 – заслонки регулирующие;
10 –теплообменник;
11 –труба в виде кольца с отверстиями в верхней части для подвода рециркулируемого газа в крошку изношенных шин и расположенная ниже теплообменника 11 реактора;
12 – топка для сжигания части рециркулируемого газа с подачей продуктов горения в теплообменник 11;
14 – вентиль для отвода жидкостной фракции пиролиза изношенных шин в реакторе;
15 – труба в виде кольца с отверстиями в верхней части для подвода рециркулируемого газа в крошку изношенных шин и расположенная в нижней части реактора;
17 – шнековый конвейер;
18 – заслонка выгрузки твердого остатка пиролиза изношенных шин из реактора;
19 – конденсатор жидкостной фракции из пиролизного газа;
20 – реактор пиролиза изношенных шин.
Данная система содержит:
1) систему автоматического регулирования давления в эталонной емкости, в которую входят следующие элементы:
- обогреваемый бункер (2);
- измерительный преобразователь уровня (1а);
- преобразователь уровня установленный на щите (1в), который ограничивает сигнал по max и умножает его в k раз, а также преобразует аналоговый сигнал в дискретный;
- вентиль (1к);
- реверсивный исполнительный механизм (1ж);
2) систему автоматического регулирования уровня материала в реакторе, в которую входят следующие элементы:
- реактор (20);
- измерительный преобразователь уровня (2а);
- преобразователь уровня установленный на щите (2в), который ограничивает сигнал по max и умножает его в k раз, а также преобразует аналоговый сигнал в дискретный;
- заслонка загрузки изношенных шин в реактор (2к);
- реверсивный исполнительный механизм (2ж);
3) систему автоматического управления выгрузкой твердого остатка пиролиза из нижней части реактора, в которую входят следующие элементы:
- реактор (20);
- измерительный преобразователь концентрации (3а);
- преобразователь концентрации установленный на щите (3в), который ограничивает сигнал по max и умножает его в k раз, а также преобразует аналоговый сигнал в дискретный;
- реверсивный исполнительный механизм (3ж);
4) систему автоматического управления давлением и амплитудой переменного давления в реакторе путем изменения подвода рециркулируемых газов в нижнюю часть этого реактора, в которую входят следующие элементы:
- измерительный преобразователь давления (8а);
- преобразователь концентрации установленный на щите (8в), который ограничивает сигнал по max и умножает его в k раз, а также преобразует аналоговый сигнал в дискретный;
- вентиль (8к);
- реверсивный исполнительный механизм (8ж);
5) систему автоматического регулирования температуры пиролиза изношенных шин в реакторе путем изменения подвода части пиролизного газа в топку, в которую входят следующие элементы:
- измерительный преобразователь температуры (9а);
- преобразователь концентрации установленный на щите (9в), который ограничивает сигнал по max и умножает его в k раз, а также преобразует аналоговый сигнал в дискретный;
- вентиль (9к);
- реверсивный исполнительный механизм (9ж);
6) систему автоматического контроля расхода пиролизных газов, выходящих из верхней части реактора и динамического расхода рециркулируемых газов в реакторе, в которую входят следующие элементы:
- измерительный преобразователь расхода (10а);
- преобразователь концентрации установленный на щите (10в), который ограничивает сигнал по max и умножает его в k раз, а также преобразует аналоговый сигнал в дискретный;
- вентиль (10к);
- реверсивный исполнительный механизм (10ж);
- вентилятор отвода пиролизного газа из верхней части реактора 20.
5 Блок нормализации сигналов от датчиков и ввода их в
УВМ
Назначение блока вытекает из его названия. Этот блок осуществляет:
- Согласование сигналов по напряжению и мощности, поступающие от измерительного преобразователя (датчика) и подаваемых в УВМ;
- Поочередный ввод аналоговых сигналов в УВМ через коммутаторы
и один АЦП, а также ввод дискретных сигналов на сигнализацию контроллера прерывания и другие.
В блок нормализации сигналов датчиков и ввода их в МСУ входят:
- модуль ограничения аналоговых сигналов по максимуму и выбора необходимой чувствительности аналоговых измерительных преобразователей на резисторах R1 – R29 (нечетные номера), R2 – R30 (четные номера) и стабилитронах DV1 – DV15;
- модули усиления и фильтрации аналоговых сигналов Е1.1 – E1.15;
- модули формирования инициативных сигналов от аналоговых датчиков Е2.1 - Е2.4;
- модули ввода в MСУ дискретных сигналов Е.3.1 – Е3.13;
- модуль коммутаторов, АЦП и параллельного интерфейса ввода аналоговых сигналов от ИП а МСУ;
- разъемы XI, Х2, ХЗ, Х6, Х7, Х8, Х9.
Разъем X1 содержит электрические цепи D0 - D7, А0, А1, I/OR и I/OW и другие и обеспечивает управление работой параллельного интерфейса DD10, АЦП DD11 и коммутаторов DD6, DD7. Все эти устройства входят в модуль под названием "Модуль коммутаторов, АЦП и параллельного интерфейса ввода аналоговых сигналов от ИП в МСУ". К этому же модулю подключен также разъем Х2 с линиями связи 12 - ВК107 и Р1.5 - READY внешний.
На разъем Х3 выводятся инициативные аналоговые сигналы от компараторов Е2.1 - Е2.4. Этим сигналам присваивается обозначение IR5 – IR8 для последующего подключения к входам контроллеров прерывания.
Разъем Х6 предназначен для подключения аналоговых датчиков. Аналоговые сигналы от датчиков должны иметь токовый выход 0-5 mA. На входном разъеме Х, указывают обозначение измерительного преобразователя (датчика), или преобразователя сигналов, от которого сигнал подается в МСУ.
5.1 Модуль усиления и фильтрации аналоговых сигналов
Для усиления аналоговых сигналов от измерительных преобразователей, а также для уменьшения пульсаций сигналов и недопущения прохождения в МСУ колебаний частотой 50 и 100 Гц используются входные модули усиления и фильтрации аналоговых сигналов Е1.1 – Е1.12. Развернутая схема модуля содержит три операционные усилителя DA1 - DA3 типа К140УД1В, режекторный (заграждающий) Т-образный RC - мостовой фильтр, настроенный на 50 Гц, и Т-образный фильтр низкая частот с частотой среза 5.0 Гц.
Усилители DA1 - DA3 имеют по два входа прямой и инверсный. На усилитель DA1 входной сигнал подается на инверсный вход. Через резистор R52 осуществляется положительная обратная связь, На выходе усилителя DA1 сигнал инвертируется. Инвертирование сигнала обеспечивает дополнительное ограничение сигнала по максимуму. На усилитель DA2 входной сигнал поступает на прямой вход, а сигнал обратной связи - инверсный вход, что обеспечивает отрицательную обратную связь (улучшающую качество выходного сигнала).
Усилитель DA3 включен аналогично усилителю DA1 с положительной обратной связью через конденсатор С6. Резисторы R51, R57, R62 являются резисторами смещения рабочей точки усилителей. Резисторы R52, Р.58, R60, R61 обеспечивают обратную связь сигналов по постоянному току, а конденсаторы С4 и С6 - обратную связь для сигналов переменного тока.
Резисторы R1 и R2 предназначены для формирования потенциала рабочей точки на входе микросхемы DD5.1 типа К155ЛН1 и для ее четкого срабатывания при изменении состояния контакта дискретного датчики или другого устройства, подключаемого к линии связи 1. Когда контакт, соединенный с линией связи 1, разомкнут и не соединяет линию связи 1 с корпусом модуля, тогда на выходе модуля в линии 140 U=1, а когда этот контакт замкнут и линия связи 1 соединена с корпусом модуля, тогда в линии 140 U=0 . Значения логических сигналов на выходе модуля согласованы для работы в схемах с микропроцессором КР560ИК80А.
Конденсатор С1 предназначен для исключения ложных срабатываний микросхемы DD5.1, то есть защищает модуль от "дребезга" контакта, который подключается к линии связи 1.
Резистор R3 предназначен для отвода потенциала с линии связи 140 на корпус, когда выход элемента DD5.1 переключается в нулевое состояние.
На выходе усилителя DA3 установлен Т – образный фильтр низших частот (пропускает на выход низкие частоты) на резисторах R59 и R61 и конденсаторе С5.
При автоматизации технологических процессов иногда требуется пассивные аналоговые сигналы, поступающие в МСУ через модули усиления и фильтрации, преобразовать в инициативные сигналы. Такая необходимость возникает, например, при организации световой и звуковой сигнализации или при переходе на подпрограмму для выполнения необходимого технологического регламента. По каждому регулируемому параметру при разработке систем автоматизации и управления обычно предусматривается по четыре сигнала. Первые два сигнала выводятся на сигнализацию о том, что значение регулируемого параметра выше или ниже рекомендуемого предела, то есть используется как предупредительная сигнализация об отклонении технологических параметров от нормального хода. Вторая пара сигналов обеспечивает аварийную сигнализацию, которая выводится или только на пульт управления, или осуществляет также и аварийные переключения исполнительных механизмов или приводов технологического оборудования. Кроме сигналов на сигнализацию от каждого из аналоговых датчиков могут формироваться дополнительно по одному или по несколько инициативных сигналов различного уровня.
Чтобы МСУ могла выполнять операции включения или выключения технологического оборудования по инициативным сигналам от аналоговых датчиков, сигналы от этих датчиков в проектируемой системе управления должны подаваться на входы контроллеров прерывания.
Аналоговый сигнал от аналогового измерительного преобразователя поступает на инверсный вход дифференциального усилителя DA1 типа К140УД6. Необходимый уровень входного сигнала, при котором должен сработать усилитель DA1 и изменить на выходе логический сигнал, задается резисторами R66 и R67 . Резисторы R66 и R67 соединены между собою как делители напряжения, подключенные к источнику питания +5 В. От точки соединения этих резисторов между собою отводится потенциал на прямой вход усилителя DA1.
Так как сигнал от измерительного преобразователя поступает на инверсный вход усилителя DA1, тогда при входном сигнале большем, чем заданный электрический потенциал резисторами R66 и R67, на выходе модуля формирования инициативного сигнала появляется логический сигнал равный единице. Если же сигнал от измерительного преобразователя меньше заданного потенциала резисторами R66 и R67, тогда на выходе модуля формируется сигнал равный логическому нулю. Резистор R65 обеспечивает утечку электрического тока на корпус из линии 89 (резистор утечки с базы входного транзистора усилителя). Резистор R68 и диод VD27 обеспечивают передачу сигнала обратной связи, а резистор R69 - буферный, сглаживающий выходной сигнал.
Стабилитрон VD2 ограничивает выходное напряжение модуля формирования инициативного сигнала по максимальному значению, равному 5 В.
5.2 Модуль преобразования аналоговых сигналов от датчиков в
цифровые коды и ввода их в МСУ
Содержит параллельный интерфейс DD10 (К580ИК55), аналого-цифровой преобразователь (АЦП DD11 (К1113ПВ1А), усилитель DD9 (К140УД1А) и два коммутатора (мультиплексора) DD6, DD7 типа K590KM6. Каждый из этих мультиплексоров может осуществлять подключение к АЦП от 1 до 8 аналоговых датчиков. К проектируемой МСУ подключено 15 аналоговых датчиков, поэтому используем 2 мультиплексора.
При использовании в проектируемой МСУ от одного до четырех мультиплексоров и одного параллельного интерфейса, порты А и С (16 каналов) этого параллельного интерфейса используются для управления мультиплексорами, а порт В - для ввода сигналов от АЦП.
Мультиплексор содержит восьмиразрядный коммутатор 8-1 (8 в 1) для восьми входных линий I0 - I7 и выходной линии О и дешифратор 3-8(3 в 8) с адресными входами А0, А1, А2 и входом сигнала разрешения EN. Таким образом, от кода на адресных входах дешифратора зависит, какая из входных линий I0 - I7 мультиплексора соединится с выходной линией мультиплексора О.
Аналого-цифровой преобразователь DD11 типа К1113ПВ1А имеет следующие выводы: D0 - D9 - выводы 10-разрядного кода сигнала (для 9-разрядных процессоров используются любые 8 выводов); I- вход аналогового сигнала; GND, GND- ноль аналогового выхода I ноль цифрового выхода, 0- сигнал управления сдвигом на ноль регистра цифрового кода; CLR/RX - сигнал низкого уровня на этом выходе указывает на готовность- приема данных внешним устройствам из АЦП (этот сигнал поступает от DD10); RDY-сигнал низкого уровня на этом выходе указывает на готовность данных на выходам DO - D9 (этот сигнал выдается АЦП и поступает по линии Р1.5 на микропроцессор).
Сущность работы модуля преобразования аналоговых сигналов от датчиков в цифровые коды и ввода их в МСУ состоит в следующем. По команде от таймера срабатывает контроллер прерывания и переводит микропроцессор (МП) на обслуживание конкретной группы датчиков по вводу от них информации в МСУ. По этой подпрограмме МП передает в параллельный интерфейс DD10 все необходимые управляющие слова для программирования его портов А, В и С, а также выводит в порт и (А0 - А7) и порт С (СО - С2) код для включения пути прохождения сигнала от датчика до АЦП с помощью коммутаторов.
Подается при этом также от DD10 сигнал РСЗ на коммутатор DD7 и АЦП DD11. Таким образам, аналоговый сигнал поступает в АЦП и преобразуется в цифровой код. К этому моменту МП также открывает пути прохождения цифрового кода с АЦП через порт В DD10 в МП и МП становится в режим ожидания сигнала RDY от АЦП, что данные на шину выставлены. После получения сигнала RDY по линии Р1.5 МП возвращается из подпрограммы в исходную программу.
Разъём Х7 предназначен для ввода дискретных сигналов.
Разъём Х8 обеспечивает вывод дискретных сигналов от модулей ввода дискретных сигналов Е3.1 – Е3.13 на сигнализацию или обычную блокировку (без контроллеров прерывания микропроцессорной системы управления).
Через разъём Х9 осуществляется вывод сигналов от аналоговых датчиков через компараторы Е2.1 – Е2.4 на сигнализацию или в цепи блокировки.
5.3 Модуль ограничения аналоговых сигналов по максимуму и
выбора необходимой чувствительности измерительных
преобразователей
ИП представленный на листе 2, содержит резисторы R1 – R29 (нечётные номера), R2 – R30 (чётные номера) и стабилитроны VD1 –VD15.
Измеряемое давление Рвх поступает на ИП, а выход ИП подключён на резистор R1. По резистору R1 протекает ток от ИП давления и создаётся падение напряжения. С помощью резистора R1 формируется необходимое значение выходного сигнала Uвых. Отношение изменения выходного сигнала ИП к изменению входного параметра представляет в данном примере чувствительность измерительного преобразователя давления. Перемещение ползунка резистора R1, изменяет чувствительность ИП. Для исключения прохождения в МСУ сигнала выше допустимого значения установлен стабилитрон VD1 между линиями 45 и 0V. Он пропускает ток из линии 45 в линию 0V, если разность напряжений превышает 4.5В.
5.4 Ввод данных от аналоговых ИП в память МСУ
- Ввод данных от аналоговых ИП в память МСУ производится по подпрограммам, на которые переходит центральный процессор.
- Переход микропроцессора на подпрограмму может происходить когда:
а) если подпрограмма вызывается основной программой;
б) проходит заданный промежуток времени для ввода информации, определённый обычно таймером;
в) поступают инициативные сигналы от аналоговых или дискретных датчиков через контроллер прерывания;
г) по заданию оператора.
- Ввод данных от аналоговых ИП В МСУ может происходить без систем выборки и хранения как в КП, так и с такими системами. Системы выборки и хранения используют тогда, когда необходимо зафиксировать быстро изменяющиеся процессы.
- Передача данных от ИП может происходить побайтно с помощью параллельных интерфейсов (КР580ИК55) или побитно с помощью последовательных интерфейсов (КР580ИК51).
- Программируемый параллельный интерфейс (PPI) (КР580ИК55) PPI имеет три порта А, В, С, которые объединены в 2 группы:
а) группа А- входит порт А и С4– С7 порта С;
б) группа В – порт В и С0 – С3 порта С.
- PPI имеет кроме регистров портов А, В и С регистр управляющего слова РУС. Это регистр 2-х байтный, т.е. 16-разрядный. В него может быть записано:
а) первый байт – управляющее слово первого типа;
б) во второй байт записывается управляющее слово второго типа.
- В блоке управления PPI имеются выводы:
- RD – чтение данных; WR – запись данных; CS – выбор кристалла;
RES – сброс. Этот сигнал сбрасывает на нули все регистры А, В, С и РУС устанавливает все порты А, В, С на ввод. А0, А1 – адресные входы – младшие адреса шины адреса микропроцессора. Задают доступ к портами задается в соответствии с таблицей 1.
Таблица 1 – Программирование портов параллельного интерфейса
|
CS |
А1 |
А0 |
Назначение |
|
0 |
0 |
0 |
Порт А–ввод/вывод |
|
0 |
0 |
1 |
Порт В–ввод/вывод |
|
0 |
1 |
0 |
Порт С–ввод/вывод |
|
0 |
1 |
1 |
Запись в РУС |
- PPI может быть запрограммирован и работать в одном из 3-х режимах:
а) режим 0 – основной (простой) режим ввода – вывода информации;
б) режим 1 – стробируемый режим ввода – вывода информации;
в) режим 2 – режим двунаправленной шины.
- Для инициализации ППИ используют два типа управляющих слов:
а) УС первого типа или УС режима работы;
б) УС второго типа или УС манипуляции с битами.
- Формат УС первого типа имеет вид:
D7 D6 D5 D4 D3 D2 D1 D0
D7=1 – для УС первого типа;
D6, D5 – режим 0 – 00, режим 1 – 01, режим 2 – 10;
D4 - порт А (РА7 – РА0): ввод - 1, вывод - 0;
D3 – порт С (РС7 – РС4): ввод – 1, вывод – 0;
D2 – группа В: режим 0 – 0, режим 1 – 1;
D1 – порт В (РВ7 – РВ0): ввод – 1, вывод – 0;
D0 – порт С (РС3 – РС0): ввод – 1, вывод – 0.
- Формат УС второго типа:
D7 D6 D5 D4 D3 D2 D1 D0
D7=0 – для УС первого типа;
D6, D5, D4 – всегда вводятся нули;
D3, D2, D1 равны соответственно N2, N1 и N0 – двоичному номеру разряда порта С:
Таблица 2 – Программирование порта С параллельного интерфейса
|
000 |
001 |
010 |
011 |
100 |
101 |
110 |
111 |
N2 N1 N0 |
|
PC0 |
PC1 |
PC2 |
PC3 |
PC4 |
PC5 |
PC6 |
PC7 |
Разряд порта С |
- УС для DD10 (лист 2) параллельного интерфейса для ввода информации от аналоговых ИП:
- Порт А – работает на вывод информации, а именно по линиям РC0 – РC2 идёт выбор одного из 8 датчиков по линиям 89-96 (DD6). РC3 активизирует DD6. По линиям РА4-РА6 выбирают один из датчиков 97-100, 111 и РА активизирует DD7.
- Выводы порта А и порта С (С7 – С4) не используются.
12.3. Порт В (РВ0 – РВ7) работает на ввод информации от АЦП DD11 и далее в МП.
12.4. Режим работы всех портов – режим 0.
12.5. УС первого типа имеет вид:
D7 D6 D5 D4 D3 D2 D1 D0: 1 0 0 1 1 0 1 0
12.6. Адресация портов для сигнала ВК 107 от дешифратора первой ступени: порт А – Е000Н; порт В – Е001Н; порт С – Е002Н; РУС – Е003Н.
12.7. данные от датчиков будут храниться в ОЗУ4 начиная от адреса 8С00Н (8С00Н – 1000 1100 0000 0000), см. таблицу 3. Для каждого датчика отведён один байт памяти для хранения одного байта данных.
Таблица 3 – Адресация линий датчиков
|
Номер линии от ИП |
89 |
90 |
91 |
92 |
93 |
94 |
95 |
96 |
|
Адрес ОЗУ |
8С00Н |
8С01Н |
8С02Н |
8С03Н |
8С04Н |
8С05Н |
8С06Н |
8С07Н |
12.8. Подпрограмма ввода данных от датчика позиция РТ-1в по линии 89 в ОЗУ4 по адресу 8С00Н (и по адресу 8С01Н для ИП по линии 90) с помощью ППИ DD10.
MVI A, 8AH; - загрузить в аккумулятор код УС 1-го вида = 8АН.
ОUT E003H; - вывести код УС в регистр РУС DD10.
MVI A, F8H; - ввод в аккумулятор МП кода числа для порта C, чтобы
выбрать путь для ввода сигнала по линии 89 через DD6.
OUT E000H; - вывод кода F8H в порт C по адресу Е000Н.
MVI A, 0FH; - ввод в аккумулятор кода числа для младшей группы
РС0 – РС3 и прохождение сигнала по линии 89.
OUT E002H; - вывод в порт С кода 0FH. Если МП выполнил это,
тогда данные от датчика поступают на АЦП, а МП
ожидает от АЦП сигнала RDY по линии Р1.5 на свой
вход READ (данные готовы), т.е. если RDY=1, тогда МП
вводит данные из порта В. DD10 по команде IN, т.е.
происходит следующие команды LXI, Н.
LXI H, 8С00Н; - загрузить в регистр МП H и L адрес ячейки памяти 8С00Н,
куда будут направлены данные от датчика.
IN Е001Н; - ввод из порта В, его адрес Е001Н, числа из АЦП в
аккумулятор АЦП.
MOV M, A; - передать данные из аккумулятора в ячейку памяти по
адресу HL, (8С00Н).
MVI A, F9H; - ввод в аккумулятор МП кода числа для порта C, чтобы
выбрать путь для ввода сигнала по линии 90 через DD6.
OUT E000H; - вывод кода F8H в порт C по адресу Е000Н.
MVI A, 0FH; - ввод в аккумулятор кода числа для младшей группы
РС0 – РС3 и прохождение сигнала по линии 90.
OUT E002H; - вывод в порт С кода 0FH. Если МП выполнил это, тогда
данные от датчика поступают на АЦП, а МП ожидает
от АЦП сигнала RDY по линии Р1.5 на свой вход READ
(данные готовы), т.е. если RDY=1, тогда МП вводит
данные из порта В. DD10 по команде IN, т.е. происходит
следующие команды LXI, Н.
LXI H, 8С00Н; - загрузить в регистр МП H и L адрес ячейки памяти 8С00Н,
куда будут направлены данные от датчика.
IN Е001Н; - ввод из порта В, его адрес Е001Н, числа из АЦП в
аккумулятор АЦП.
MOV M, A; - передать данные из аккумулятора в ячейку памяти по адресу
HL, (8С00Н).
- Блок микропроцессора СУ
- Входные сигналы управления на МП
RES – сигнал сброса от внешних устройств, по этому сигналу в МП счётчик команд устанавливается на 0, а также происходит сброс триггеров разрешения прерывания и захват шин;
RDY – сигнал готовности, поступает от ВУ в МП. Сигнал U=1 указывает, что данные внешнее устройство на ШД выставила, или, что ВУ готово принять данные;
HOLD – сигнал U=1 от ВУ указывает на то, что ВУ запрашивает захват шин системы (данных и адреса);
INT – вход сигнала запрос на прерывание от ВУ.
- Выходные сигналы управления на МП
HLDA – подтверждение захвата шин, т.е. МП выдаёт U=1 и разрешает захват шин. Это ответ на запрос HOLD;
WI – сигнал ожидания. МП выдаёт U=1 и переходит в режим ожидания;
INTE – выход сигнала разрешения прерывания при U=1. Ответ на запрос INT;
DBIN – выход сигнала приём, т.е. при U=1 на этом выходе, МП указывает, что он переходит в режим приёма, чтения данных из ВУ или памяти ОЗУ, ПЗУ;
WR – сигнал выдача, запись, т.е. при U=0 МП выдаёт байт информации для записи в ВУ или память;
SYN – сигнал синхронизации. Сигнал U=1 сопровождает начало каждого цикла работы МП;
CL1, CL2 – вход фазы 1 и фазы 2 от генератора сигнала.
- Формирование основных управляющих сигналов в МСУ
При использовании МП необходимо чётко представлять его динамику
работы, т.е. взаимосвязь программа – команда – управляющие сигналы. А именно:
- Программа для ЭВМ состоит из команд.
- Команда – это одно или несколько действий.
- команда обычно выполняется за 1 – 5 машинных циклов.
- машинный цикл (М) – время, которое необходимо для извлечения 1 байта информации из памяти или выполнения одной команды длинной одного машинного слова.
- машинный цикл состоит из 1 – 5 машинных тактов. Работа МП проходит по тактам, по сигналам от тактового генератора.
- В МП имеется 10 различных типов машинных циклов.
- Первым машинным циклом при выполнение любой команды МП является цикл М1 – извлечение кода команды.
- Первым тактом в первом цикле М1 и в каждом последующем цикле всегда является такт выдачи МП на магистраль данных 8 – разрядного слова состояния (СС).
- Назначение каждого разряда в слове состояние и форма СС приведены в таблице. О – выход сигнала из регистра DD12. МП с использованием своих сигналов от РСС фактически управляет всеми операциями.
Таблица 4 –Алгоритм работы микропроцессора при каждом из 10циклов работы
- Дешифраторы адресов МСУ
В МСУ доступ ко всем ячейкам памяти ОЗУ и ПЗУ, ВУ производится с помощью дешифраторов адреса. Каждый имеет свой адрес.
В МСУ дешифраторы делятся на две ступени: А15 – А12 – (дешифратор DD1) – обрабатывают 4 старших разряда адресной линии, т.е. это первая ступень дешифраторов в МСУ; А11 – А0 – вторая ступень дешифраторов адреса в МСУ. А11- А10 – эти 2 разряда обрабатывают дешифраторы DD6 и DD5. А9 – А0 - некоторые из этих разрядов совместно с DD1 используются для доступа к таймерам, контроллерам прерывания, а также к портам интерфейса, таймеров. Это также вторая ступень дешифратора.
- Дешифратор адреса первой ступени
Микропроцессор КР580ИК80А имеет шину адреса, содержащую 16 линий, то есть 16 – разрядную адресную шину А0 – А15. Старшими разрядами являются А15, А14, а младшие А1, А0. В проектируемой МСУ используется, в основном, двухуровневая структура адресации. В качестве дешифратора первой ступени DD1 выбран дешифратор – демультиплексор К155ИД3 (DD1). Он преобразует двоичный код, подаваемый на четыре входа 20 – 23, в унарный (одиночный) сигнал на одном из выходов 0 – 15, то есть является дешифратором 4 на 16. Сигналы разрешения работы дешифратора подаются на входы EN1 и EN2. Структура дешифратора – демультиплексора К155ИД3 содержит 4 инвертора, 16 логических элементов И на 5 входов и один элемент НЕ-И на два входа.
Четыре старших разряда адреса А15 – А12 от микропроцессора по линиям 3 – 6 подключены на входы 20 – 23 дешифратора первой ступени DD1. В зависимости от кода на этих входах формируется низкий уровень на одном из выходов DD1. Эти сигналы поступают на следующие элементы:
Сигналы 12 и 13, а также сигналы 16 и 17 подаются на управление дешифраторами DD5 и DD6 второй ступени для формирования сигналов доступа к кристаллам соответственно ПЗУ и ОЗУ. Сигналы 12 и 16 при этом проходят дополнительно через инверторы DD14.6 и DD15.4 на линии связи 42 и 110.
Сигнал 107 через разъём с надписью ВК107 поступает на параллельный интерфейс DD10, который обслуживает АЦП и входные коммутаторы.
Сигнал 108 с надписью на разъёме ВК108 поступает на дешифраторы адреса выбора контроллеров прерывания, расположенных в блоке клавиатуры и индикации.
Сигнал 18 поступает на дополнительный третий интерфейс (при его необходимости) вывода сигналов на исполнительные механизмы.
Сигнал 19 подаётся на параллельный интерфейс DD6 вывода информации (сигналов) на ИМ и на графопостроитель.
Сигнал 105 подаётся на параллельный интерфейс DD1 вывода информации из МСУ на ИМ и печать. Сигнал 106 поступает на дешифраторы таймеров.
- Сдвоенный дешифратор DD5, DD6
- В проектируемой МСУ эти микросхемы используются в качестве дешифраторов 2 ступени, а именно доступа к памяти ПЗУ1 – ПЗУ8 через DD5; ОЗУ1 – ОЗУ8 через DD6.
- После включения питания в МСУ на всех линиях адреса А0 – А15 от МП DD2 поступают сигналы U=0. Сигналы с А12 – А15 поступают на дешифратор 1 ступени DD1. При нулевых значениях на этих 4 выходах на выходе DD1, на линии 12 U=0, а на всех остальных U=1.
В таблице 5 отражена работа дешифратора – демультиплексора типа К155ИД4. Нулями отмечены сигналы низкого уровня, появляющиеся на выходах дешифратора в зависимости от сигналов разрешения и сигналов на адресных входах. Единичные состояния выходов дешифратора в таблице не отмечены. Из таблицы состояния видно, что вторая группа сигналов не формируется на выходе дешифратора сигналов низкого уровня, а третья группа формирует сигналы низкого уровня на двух выходах одновременно. Таким образом, рабочее состояние дешифраторов в проектируемой МСУ будет обеспечиваться сочетанием входных сигналов первой и четвёртой групп.
Таблица 5 – Состояния дешифратора – демультиплексора типа
К155ИД4
|
Входы |
Выходы |
||||||||||||
|
EN1 |
EN2 |
SEL1 |
SEL2 |
A0 |
A1 |
2.0 |
2.1 |
2.2 |
2.3 |
1.0 |
1.1 |
1.2 |
1.3 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
1 |
|
0 |
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
1 |
0 |
|
|
0 |
|
|
|
|
|
|
0 |
0 |
0 |
0 |
1 |
1 |
|
|
|
0 |
|
|
|
|
|
0 |
1 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
0 |
1 |
1 |
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
|
0 |
|
|
|
|
1 |
0 |
0 |
0 |
0 |
1 |
|
0 |
|
|
|
0 |
|
|
|
1 |
0 |
0 |
0 |
1 |
0 |
|
|
0 |
|
|
|
0 |
|
|
1 |
0 |
0 |
0 |
1 |
1 |
|
|
|
0 |
|
|
|
0 |
|
1 |
1 |
0 |
0 |
0 |
0 |
|
|
|
|
0 |
|
|
|
|
1 |
1 |
0 |
0 |
0 |
1 |
|
|
|
|
|
0 |
|
|
|
1 |
1 |
0 |
0 |
1 |
0 |
|
|
|
|
|
|
0 |
|
|
1 |
1 |
0 |
0 |
1 |
1 |
|
|
|
|
|
|
|
0 |
- Сигнал по линии 12 U=0 проходит инвертор DD14.6 и по линии 110 поступает на вход EN1 как сигнал U=1. На втором выходе DD1 и в линии 13 U=1. Этот сигнал поступает на EN2 DD5; т.о. на оба входа EN1 и EN2 идут сигналы равные 1. Тогда согласно таблице состояний будет обеспечен доступ к выходам 1.0 – 1.3 или это доступ к ПЗУ1 – ПЗУ4.
- На линиях А10 – А11 МП U=0. Эти линии проходят через буфер адреса DD16 по линиям 48 и 49. Эти линии поступают на входы А0, А1 DD5 или DD6. При нулевых значениях на этих линиях согласно таблице будет доступ к выходу 1.0, т.е. к ПЗУ1. Таким образом, после включения системы в работу, после подачи питания сразу происходит доступ к ПЗУ1, где может быть адрес какой-то подпрограммы, которая автоматически выполняется. Например, подпрограммы готовности системы к восприятию данных.
- Если МП выдаёт на линиях А15 – А12 код 0001. Этот код поступает на дешифратор DD1 и тогда на выходе О2 и в линии 13 U=0, а во всех остальных линиях и в линии 12 DD1 U=1. Сигнал 12 инвертор DD14.6, поэтому на обоих входах EN1, EN2 DD5 U=0, согласно таблице будет доступ к выходам 2.0 – 2.3 или в зависимости от кода на линиях А0, А1 по линиям 48, 49 от адресных линий А10, А11 DD16, будет доступ к ПЗУ5 или ПЗУ8. Аналогично идёт доступ к ОЗУ1, ОЗУ5 по сигналам линий 16 и 17 (выходы 9 и 10 DD1). Сигнал по линии 16 проходит элемент “И - НЕТ” DD15.4 на второй вход этого элемента поступает питание, т.е. выходной сигнал 42 будет равен 0, если питание подано.
Таким образом, в зависимости от низкого уровня сигнала от дешифратора первой ступени DD1 в одной из линий 12, 13, 16 или 17 происходит выбор одной из четырёх групп выходных сигналов DD5 и DD6: ПЗУ1 – ПЗУ4 или ПЗУ5 – ПЗУ8 и ОЗУ1 – ОЗУ4 или ОЗУ5 – ОЗУ8. В зависимости от кода на адресных входах по линиям 48 и 49 осуществляется формирование сигнала низкого уровня на одном из четырёх выходов одной из этих четырёх групп выходов. Доступ к кристаллам ОЗУ прекращается после съёма электрического питания с элемента DD15.4.
- Буферы шины адреса
Информация, которая выдаётся МП на шине адреса и данных поступает ко многим устройства: ОЗУ, ПЗУ и ВУ, интерфейсы. Однако выходы МП, в том числе КР580ИК80А допускают потребление от них относительно небольшого тока. Следует, что к одному выходу МП можно подключить одно устройство, поэтому шины адреса и данных подключают буферы. Для построения таких буферов используют шинные формирователи.
В качестве буфера адреса в МСУ используются шинные формирователи КР580ВА86 и КР580ВА87. В разработанной системе управления в качестве буферов адреса МП используются микросхемы К155ЛП10. В каждую из этих микросхем входят шесть повторителей с тремя состояниями на выходе, то есть шесть Z-буферов-повторителей.
На листе 3 приведена схема подключения трёх буферов DD13, DD16 и DD19 в линию адреса МП. От МП адресные выходы А15 – А0 поступают на входы буферов DD13, DD16 и DD19, а на выходе их формируется шина адреса с линиями 3 – 6, 48, 49, 90 – 99.
Выходы буфера DD19 3 – 6 (как указывалось выше) поступают на вход дешифратора первой ступени DD1, выходы 48, 49 от DD16 поступают на адресные входы дешифраторов второй ступени для ПЗУ и ОЗУ DD5 и DD6, а остальные выходы поступают на общемашинный разъём Х2. По линии 85 поступает сигнал из схемы прямого доступа к памяти (ПДП) от элемента DD3, где формируется он, равным 0 или 1. Для буферов DD13, DD16 и DD19 сигнал по линии 85 является z-сигналом для z-буферов. Если по линии 85 поступает сигнал z=1, тогда переводятся в высокоомное состояние все выходы буферов адреса, шина адреса отключается от микропроцессора, и используется для прямого доступа к памяти. Если сигнал по линии 85 равен нулю, тогда происходит обычная работа шины адреса с МП.
- Буферы шины данных
В микропроцессорной системе управления используется два буфера шины данных DD7 и DD11, выполненых на шинных формирователях КР589АП16. ШД в МСУ 8 – разрядная, а буферы 4 – разрядные, поэтому используется 2 буфера, работающих параллельно.
Эти буферы двунаправленного действия, то есть они могут пропускать сигналы от МП на шину данных или наоборот из шины данных в МП. Буферы типа К5879АП16 имеют 4 вывода I/O (I/O0 – I/O3). Эти выводы подсоединяются к общесистемной для МСУ шине данных и через них данные могут проходить в обоих направлениях, а также имеются две группы по 4 вывода, через которые данные проходят только в одном направлении. А именно: четыре входа I0 – I3, обеспечивают прохождение данных из МП в буфер (а затем на шину данных) и четыре выхода О0 – О3, через которые данные от буфера (и из шины данных) поступают в МП. Направление движения данных через буфер задаётся сигналами, подаваемыми на его входы CS и SEL.
Буфер К589АП16 содержит 8 управляемых z-буферов, четыре из которых обеспечивают прохождение данных в одном направлении, четыре других в противоположном направлении, логический элемент на два входа НЕ-И-НЕТ для формирования сигнала управления z1 четырьмя z-буферами и элемент И-НЕТ для формирования сигнала управления z2 другой четвёркой z-буферов, а также резисторы R23 – R26, через которые подводится электропитание на линии шины данных.
Работа буфера происходит следующим образом. Если на входы управления подаются сигналы по линиям 47 и 11 CS=0 и SEL=0, тогда z1=0, а z2=1 и данные
проходят со входов I0 – I3 (от МП) на выходы I/O0 – I/O3 (на шину данных). Если же сигналы CS=0, SEL=1, тогда z1=1, а z2=0 и данные проходят с выводов I/O0 – I/O3 (из шины данных) на выводы О0 – О3 (и далее на МП). Сигнал CS по линии 47 проходит через многие элементы, но идёт от МП с выхода HLDA, а сигнал SEL по линии 11 также проходит много элементов от МП с выхода DBIN (приём или выдача данных).
- Регистр слова состояния и регистр данных, выводимых на
сегменты индикаторов
Регистр слова состояния (РСС) предназначен для приёма от МП в начале каждого цикла его работы кода слова состояния (СС), записи и хранения его в течение всего цикла, а также для выдачи (согласно слову состояния) необходимых сигналов управления. Эти сигналы, совместно с сигналами управления микропроцессора, осуществляют все операции переключения устройств в МСУ во время её работы.
В качестве регистра слова состояния в МСУ используется многорежимный буферный регистр (МБР) DD12 типа К589ИР12. Он имеет: 10 – 17 – входы сигналов (информации); CS1, CS2 – входы выбора кристалла; MD – вход выбора режима; EW – вход строба; R – сброс; INR – выход удлинённого входа (инвертированного) строба.
МБР в качестве РСС включён по первому режиму, при котором вход MD заземлён, а CS2=1, то есть в этом режиме CS1=0, CS2=1 и MD=0. При поступлении строба от МП на вход EW, то есть при EW=1, происходит запись (защёлкивание) слова состояния в регистре. Строб от МП на РСС поступает в начале каждого цикла.
Многорежимный буферный регистр типа К589ИР12 используется в МСУ также в качестве регистра данных, выводимых на сегменты индикаторов, DD8. В этом случае МБР включён по второму режиму, при котором EW=0, а MD=1 (так как этот вход соединён с линией 79, на которую подаётся питание Ж возле триггера DD3). По стробу, поступающему на вход CS1 и по сигналу, равному 1 с линии 17 на CS2 от устройства прямого доступа к памяти (ПДП), регистр DD8 защёлкивает данные, поступающие на входы 10 – 17.
- Запись данных в память (ОЗУ) или внешнее устройство (ВУ)
Формирование сигналов для записи данных в память (ОЗУ) или ВУ приведено на листе 3. Микропроцессор обозначен DD2, регистр слова состояния DD12.
Известно, что при записи данных в ОЗУ или ВУ МП выдаёт на выходе WR U=0. Регистр слова состояния DD12 по слову состояния, которое запоминается им в начале каждого цикла от МП, выдаёт на выходе О4 сигнал U=1 при записи в ВУ и сигнал U=0 при записи в ОЗУ.
Если на выходе О4 DD12 выдаётся U=1, а на выходе WR U=0, тогда на выходе DD17.1 U=0 и будет осуществляться запись на ВУ (на выходе DD17.2 в этом случае U=1). Если же на выходе О4 DD12 выдаётся сигнал U=0, при сохранении на выходе WR U=0, тогда на выходе на выходе DD17.2 U=0 (а на выходе DD17.1 U=1) и происходит запись данных в ОЗУ.
- Синхронизация работы МП и регистра слова состояния и
формирование строба слова состояния
В эту схему входит генератор тактовой частоты, триггер DD20.2 и инвертор DD14.5. Генератор тактовой частоты на 4 МГц на выход 2 выдаёт сигналы частотой 4 МГц, а на выходах 9 и 10 формирует сигналы частотой 2 МГц, но сдвинутые по фазе на 1800 с одноимённой полярностью. Выход МП DD2 SYN – выход сигнала синхронизации, а в регистре слова состояния DD2 вход STR – вход для сигнала синхронизации. Если от МП подаётся сигнал SYN=0 (исходное состояние), тогда на входе D – триггера DD20.2 U=0, а с частотой 2 МГц на вход С поступают сигналы от генератора сигналов (ГС) через DD4.5. На выходе триггера DD20.2 формируется сигнал U=0. Частотой 4 МГц происходит сброс триггера на ноль через вход R, если триггер был установлен в единичное состояние. Если же от МП подаётся сигнал SYN=1, тогда на выходе DD20.2 формируется сигнал U=1 и поступает на вход STR DD12, то есть происходит синхронизация DD2 и DD12. Однако через половину периода основных сигналов по линии 2 поступает сигнал на вход R DD20.2 и триггер сбрасывается на ноль. По этому сигналу синхронизации РСС DD12 записывает СС от МП. После прохождения времени, равного половине периода частотой 2 МГц, триггер DD20.2 через вход R сбрасывается на ноль. Одновременно с этим на инверсном выходе формируется строб обратной полярности, который поступает на триггер DD20.1.
- Формирование сигнала удлинённый DBIN
Формирование сигнала удлинённый DBIN происходит по схеме на листе 3. Она содержит МП DD2, два триггера DD21 и DD20.2, три инвертора DD14.1, DD14.2 и DD14.3 и два элемента “И” DD18.1 и DD18.2. МП на выходе DBIN выдаёт U=1, когда он готов к приёму данных из ОЗУ, ПЗУ и ВУ. Триггер DD20.2 на инверсном выходе выдаёт строб с частотой 2 МГц, а снимает его с частотой 4 МГц, поступающий на вход R, если на вход D – триггера DD20.2 поступает сигнал синхронизации SYN с выхода МП DD2. В исходном состоянии на инверсном выходе триггера DD20.2 U=1, на прямом выходе триггера DD20.1 U=1, сигнал DBIN=0 на выходе МП DD2, а поэтому на обоих входах DD18.2 U=1, а на его выходе сигнал удлинённый DBIN=0. Если МП выдаёт сигнал DBIN=1, тогда на верхнем входе DD18.2 U=0 (при U=1 на нижнем входе) и сигнал удлинённый DBIN=1. При изменении сигнала на верхнем входе DD18.2 с 1 до 0 происходит сброс триггера DD20.1 и на прямом выходе становится U=0.
Таким образом, на обоих входах DD18.2 U=0, а на его выходе удлинённый DBIN=1. Через некоторое время МП DD2 снимает сигнал DBIN, он равен нулю, и на верхнем входе DD18.2 U=1, но сигнал удлинённый DBIN продолжает быть равным единице пока строб не поступит на вход С триггера DD20.1. После этого сигнал удлинённый DBIN=0. Удлинение сигнала DBIN по времени произошло за счёт срабатывания триггеров DD20.2 и DD20.1
- Формирование сигналов I/OR (чтение ВУ) и MEMR
(чтение ОЗУ и ПЗУ)
Схема формирования сигналов содержит МП DD2, регистр СС DD12, схему удлинения DBIN и два элемента “И” DD17.3 и DD17.4. Из таблицы
состояния сигналов в каждом цикле следует, что для чтения из ВУ на выходе О6 DD12 U=1, на выходе О7 U=0 и сигнал удлинённый DBIN=1 в линии 9. В этом случае на выходе DD17.3 U=0, то есть сигнал I/OR=0 и будет производиться чтение данных из ВУ (на выходе DD17.4 U=1). Если же на выходе О7 DD12 U=1, на выходе О6 U=0 и удлинённый DBIN=1, тогда на выходе DD17.4 U=0, то есть сигнал MEMR=0 и будет производиться чтение данных из памяти (ОЗУ или ПЗУ). Сигнал на выходе DD17.3 равен единице.
- Формирование сигналов CS и SEL для управления буферами
шин данных
Схема формирования сигналов CS и SEL для управления шин данных DD7 и DD11 содержит МП DD2, регистр СС DD12, буферы шины данных DD7 и DD11, триггер DD20.1 и другие элементы. Из таблицы состояния сигналов для каждого цикла работы МП следует, что при О1=0 на выходе РСС DD12 происходит запись данных, а при О1=1 на том же выходе чтение данных. Если, например, происходит чтение (приём) данных из памяти (ОЗУ или ПЗУ) или ВУ, тогда О1=1 на выходе DD12 и HLDA=0 на выходе DD2 (так как захват шин не будет МП разрешён) и DBIN=1 потому, что МП приём данных разрешает. Так как сигнал DBIN=1, тогда на входах SEL DD7 и DD11 U=1 и эти буферы включаются на ввод данных в МП. На линии 47 в это время U=0 (буферы DD7 и DD11 включаются в работу) потому, что на входе DD18.3 U=1 от DD12 (при чтение) и на выходе триггера DD20.1 U=0. На прямом выходе DD20.1 U=0 потому, что при поступление сигнала DBIN=1 от МП DD2 на выходе DD18.1 сигнал изменяется от 1 до 0 и происходит сброс триггера DD20.1 в нулевое состояние. С приходом очередного строба слова состояния (СС) триггер DD20.1 устанавливается в единичное состояние, на прямом его выходе U=1, на выходе DD18.3 U=0, а на выходе DD18.4 U=1 (по линии 71 U=1), сигнал CS=1 и DD7 и DD11 выключаются. Если будет производиться запись данных в ОЗУ или ВУ, тогда DBIN=0 и на входах SEL U=0. На выходе DD18.1 U=1, поэтому триггер не сбрасывается и на его прямом выходе U=1. Сигнал О1=0 на выходе DD12. На выходе DD18.3 U=1, а на выходе DD18.4 U=0, CS=0 в линии 47 и буферы DD7 и DD11 включаются на вывод данных из МП на шины данных и далее на ОЗУ и ВУ. После окончания цикла записи данных на выходе О1 DD12 сигнал изменяется на U=1, в линии 47 U=1 и DD7 и DD11 выключаются.
- Формирование сигналов прерывания в микропроцессорной
САУ
Модуль приоритетного прерывания предназначен для использования в
микропроцессорных САУ, в которых режим обработки информации изменяется в зависимости от внешних программно-непредсказуемых событий. Основная функция модуля приоритетного прерывания сводится к распознаванию внешних событий и выдаче управляющих сигналов в микропроцессорную САУ, которая (при определённых условиях) временно прекращает выполнение текущей программы и передаёт управление другой программе, специально предусмотренной для данного случая. Микропроцессор КР580ИК80А позволяет реализовать векторное многоуровневое приоритетное прерывание путём подключения к нему дополнительноё специальной схемы прерывания, основным элементом которой является контроллер прерывания. В рассматриваемой микропроцессорной САУ используются
контроллеры прерывания типа КР580ВН59.
Периферийные устройства микропроцессорной САУ могут запросить прерывания текущей программы у микропроцессора DD2 путём подачи сигнала INT, подаваемого на его вход INT. Сигнал прерывания может возникнуть в любой момент цикла команды. Обработка прерываний организована таким образом, что запрос прерывания фиксируется во внутреннем триггере запроса прерывания микропроцессора. Причём запрос прерывания фиксируется только при переходе микропроцессора к циклу М1, то есть к начальному циклу очередной команды, что свидетельствует об окончании выполнения текущей операции. Выполнение этих условий приведёт к тому, что следующий машинный цикл будет циклом обработки запроса прерывания. Машинный цикл прерывания, который начинается в такте Т1 в условиях разрешённого прерывания, повторяет в основном машинный цикл выборки. В течение времени, определяемого единичным (Н - уровнем) сигналом синхронизации, микропроцессор формирует на своём выходе INTE сигнал U=1.
Фактически сигнал INTE на выходе микропроцессора является квитирующим, то есть сигналом, который повторяется дважды в течение одного полного цикла работы микропроцессора. В рассматриваемой микропроцессорной САУ сигнал запроса прерывания на вход INT микропроцессора DD2 может поступать от параллельного интерфейса, который обслуживает клавиатуру, и от внешних устройств через контроллер прерывания DD13. Допустим, что нажимается какая-либо клавиша клавиатуры и поступает сигнал U=1 на вход 1D триггера DD18.2. Микропроцессор DD2 на цикле М1 на выходе INTE формирует сигнал, равный единице. Этот сигнал проходит элементы “И-НЕТ” DD15.2 и DD15.3 и поступает на вход R триггера DD8.2. По сигналу синхронизации, который поступает на вход с триггера DD8.2 от регистра слова состояния DD12 с выхода О5, с учётом сигналов, поступающих на входы 1D и R триггера DD8.2, этот триггер переходит в режим установки, при котором на прямом выходе U=1, а на инверсном выходе U=0. Этот сигнал проходит элемент “И-НЕТ” и в виде сигнала U=1 поступает на вход INT микропроцессора и защёлкивается внутренним триггером. Микропроцессор снимает сигнал INTE, то есть он становится равным нулю, триггер DD8.2 переходит в режим сброса, при котором на прямом выходе U=0, а на инверсном выходе U=1.
Сигнал с инверсного выхода триггера проходит элемент “И-НЕТ” и поэтому на входе INT микропроцессора устанавливается сигнал, равный нулю. Такая
последовательность формирования сигнала INT на микропроцессор наблюдается в случае, когда сигнал запроса прерывания от контроллера прерывания DD13 с выхода INT не поступает, то есть он равен нулю. Если запрос на прерывание поступает от какого-либо внешнего устройства, он вначале поступает на один из входов IR0 – IR7 контроллера прерывания DD13.
Контроллер прерывания формирует на выходе INT сигнал, равный единице, который проходит инвертор “НЕТ” и элемент “И-НЕТ” (при условии, что с инверсного выхода триггера DD8.2 поступает сигнал U=1) и в виде сигнала U=1 поступает на вход INT микропроцессора DD2. Работа микропроцессора по восприятию сигнала запроса в этом случае от параллельного интерфейса клавиатуры. Однако после перехода на обслуживание прерывания микропроцессор DD2 передаёт в регистр слова состояния DD12 соответствующее слово состояния. В слове состояния в разряде О0 на выходе регистра слова состояния DD12 формируется сигнал U=1, который поступает на вход INTA контроллера прерывания DD13. По этому сигналу контроллер прерывания по линиям данных по команде CALL<A1><A2> передаёт адрес ячейки памяти, с которой начинается подпрограмма обслуживания внешнего устройства.
Микропроцессорная САУ обслуживает запрос внешнего устройства, а после выполнения подпрограммы возвращается в исходную программу.
7 Блок клавиатуры, индикации и формирования
векторов прерывания
7.1 Основные элементы блока прямого доступа к памяти и вывода
информации на дисплей
Этот блок содержит следующие элементы. Генератор сигналов на 1200 Гц, который собран на двух логических инверторах DD1.1 и DD1.2, резисторе R25 и конденсаторе С1. Сигнал с выхода генератора постоянно подаётся на вход С синхронизации триггера DD3, а также через два инвертора DD1.3 и DD1.4 на вход С2 счётчика DD6 и на вход элемента И – НЕТ DD4.3.
Счётчик DD6 типа К155ИЕ5 содержит 4 Т-триггера и элемент И-НЕТ на два входа для формирования сигнала установки счётчика на ноль (сброса на ноль). Счётчик имеет два входа Т0 и Т1 и четыре выхода СТ0 – СТ3. Если входной сигнал подаётся Т1, тогда счётчик работает как трёхразрядный. Если Т1 соединить с выходом СТ0 и входные сигналы подавать на вход Т0, тогда счётчик будет работать как четырёхразрядныё.
В схеме прямого доступа к памяти счётчик DD6 работает как трёхразрядный и предназначен для формирования восьми адресов с кодами от 000 до 111 на младших линиях адреса А0, А1 и А2 при поочерёдном доступе к 8 ячейкам ОЗУ при ПДП. Для этой цели сигналы от счётчика DD6 поступают на 3 логических элемента И-НЕТ DD5.2, DD5.3 и DD5.4. При поступлении второго сигнала на эти элементы от триггера DD3 они срабатывают и передают код адреса от счётчика на линии адреса А0, А1 и А2.
Дешифратор адреса DD7 на базе сдвоенного дешифратора – демультиплексора К155ИД4 предназначен для поочерёдной выдачи сигналов на восьми выходах при непрерывном формировании кодов адресов на адресных линиях А0, А1, А2 счётчиком DD6. Сигналы с выходов DD7 через усилители VT2 – VT16 (чётные) поступают на катоды 8 индикаторов дисплея и обеспечивают поочерёдное их подключение к источнику питания.
Многорежимный буферный регистр DD8 предназначен для защёлкивания на каждом такте доступа к памяти (с частотой 1200 Гц) данных ячейки памяти ОЗУ (поочерёдно из восьми ячеек ОЗУ), хранение этих данных в течении такта и выдачи их на аноды всех индикаторов дисплея. По этим данным формируется на индикаторах (на всех) какая-то цифра или буква, а высвечиваться эта цифра или буква будет на том индикаторе, катод которого подключён в данный момент к источнику питания с помощью дешифратора адреса DD7. Сигналы от буферного регистра на аноды индикаторов проходят через усилители VT1 – VT15 (нечётные).
Совместное подключение усилителей VT2 – VT16 (чётных) на катоды индикаторов и усилителей VT1 – VT15 (нечётных) на аноды индикаторов показано на листе 4. На входы 1 – 8 и на базы триодов VT2 – VT16 (чётные), а затем на катоды индикаторов поступают сигналы (поочерёдно) от дешифратора адреса DD7, а на входы 9 – 16 и базы триодов VT1 – VT15 (нечётные) подаются (одновременно на все аноды всех индикаторов) данные из буфера DD8.
В проектируемой МСУ предусматривается в качестве дисплея использовать восемь индикаторов. Каждый индикатор представляет собой семисегментную светодиодную матрицу типа АЛС335А. Каждая из восьми светодиодных матриц обслуживает строго определённую одну из восьми ячеек ОЗУ, к которым осуществляется прямой доступ. Поэтому программно в каждую ячейку ОЗУ строго определённая информация.
7.2 Организация ПДП и вывода информации на дисплей
В микропроцессорной системе управления технологическим процессом блок прямого доступа к памяти и вывода информации на дисплей работает в мультиплексорном режиме. Микропроцессор К580ИК80А работает на частоте 2 МГц. Генератор сигналов ПДП на инверторах DD1.1 и DD1.2 имеет частоту 1200 Гц и устройство ПДП срабатывает с этой частотой. Если 2 МГц разделить на 1200 Гц, тогда получим, что через каждые 1666 тактов срабатывает МП, он прерывается и даёт возможность в течении необходимого числа тактов отрабатывать системе ПДП и выводить информацию на дисплей. С другой стороны к устройству ПДП подключены 8 индикаторов, причём присоединены они по приёму информации поочерёдно потому, что дешифратор адреса DD7 выдаёт сигналы на катоды восьми индикаторов последовательно. На основании этого катоды индикаторов будут зажигаться с частотой, равной 1200:8=150 Гц, на время, равное одному периоду этой частоты (а не 1200 Гц или 2 МГц). Из светотехники известно, что если частота колебаний превышает 15 – 20 Гц, тогда создаётся эффект непрерывного свечения, поэтому и информация на всех индикаторах будет визуально восприниматься непрерывной.
Кроме рассмотренных устройств в осуществлении прямого доступа к памяти участвуют элементы DD1.5, DD4.1, DD14.3, DD15.1, DD4.2, DD5.1, DD2.1, DD4.3. Элемент DD1.5 через разъём Х1 соединён со входом R МП и с кнопкой “Сброс” и обеспечивает сброс системы ПДП в исходное состояние. Элемент DD4.1 служит для ввода в систему ПДП сигнала от кнопки “Сброс” через DD1.5 и сигнала HLDA от МП DD2 через элемент DD14.3. Элемент DD15.1 служит для ввода в МП сигнала INT (на прерывание). Если сигнал INT не поступает (исходное состояние), тогда на разъёме INTвнешний U=1, а на выходе DD15.1 U=0, МП не переходит в режим прерывания и может разрешить ПДП. Из этого следует, что элемент DD4.2 служит для блокировки сигналов INT и HOLD и для исключения одновременной подачи этих сигналов на МП. Элемент DD5.1 обеспечивает аналогичную блокировку по вводу сигнала HOLD от внешнего устройства.
Непосредственная работа модуля ПДП происходит в следующей последовательности. На каждый сигнал от генератора сигналов частотой
1200 Гц срабатывает триггер DD3 и на его прямом выходе появляется сигнал U=1. При отсутствии запросов от внешних устройств на прерывание и захват шин этот сигнал пропускается элементами DD4.2 и DD5.1 и поступает на вход HOLD МП, запрашивая в МП “захват шин”. Если МП разрешает осуществить ПДП, он выдаёт на свой выход HLDA сигнал U=1 (до разрешения захвата шин на выходе HLDA U=0, на выходе DD14.3 U=1 и от DD1.5 U=1, а на выходе DD2.1 U=0, поэтому DD2.1 не может сработать). Этот сигнал переключает DD14.3 в нулевое состояние на выходе, а на выходе DD4.1 и на входе DD2.1 будет U=1. Второй сигнал на входе DD2.1, поступающий от триггера DD3, также равен единице (он же делает запрос на ПДП). Третий сигнал на элемент DD2.1, поступающий через разъём Х1, является сигналом синхронизации МСУ. После этого элемент DD2.1 срабатывает и на выходе появляется фронт сигнала от 1 до 0. По этому фронту нижний триггер DD3 устанавливается, на прямом выходе появляется сигнал U=1, который разрешает пройти коду адреса на линии А0, А1, А2 от счётчика DD6 через элементы DD5.2, DD5.3, DD5.4. После того, как адрес на шинах адреса выставлен, данные из ячеек ОЗУ по этому адресу заносятся в регистр DD8 и появляется информация на индикаторах дисплея.
Нижний триггер DD3 с инверсного выхода подаёт сигнал с фронтом, изменяющимся от 1 до 0, на R вход верхнего триггера DD3 и сбрасывает его, устанавливая на прямом выходе U=0 и снимая запрос HOLD с МП DD2.
МП снимает сигнал HLDA и на выходе DD4.1 и входе DD2.1 сигнал снижается до нуля, а на выходе DD2.1 U=1, нижний триггер сбрасывается на ноль с помощью сигналов на выходах D и C, которые заземлены. На верхнем выходе нижнего триггера DD3 устанавливается U=0, элементы DD5.2, DD5.3 и DD5.4 отключают шину адреса от устройства ПДП и начинается обычная работа системы управления и МП, а режим ПДП заканчивается.
7.3 Программируемый таймер КР580ВИ53
В САУ таймеры используются:
а) для осуществления последующего включения механизмов и устройств в одной последовательности и выключения этих устройств обычно в другой последовательности;
б) для непрерывного генерирования сигналов заданной частоты и возможностью изменения этой частоты;
в) для определения времени изменения какого-то параметра;
г) для определения текущего времени.
Таймер КР580ВИ53 – это фактически счётчик времени, с другой стороны таймер – это генератор частоты. Причём таймер имеет синхронизацию по запуску и по выключению. DOUT0 – DOUT2 – выходные сигналы таймера от 3-х его входов. SYN0 – SYN2 – входы синхронизации счётчиков. Т.е. входы сигналов от генераторов. Сигналы должны поступать непрерывно на эти входы. EN0 – EN2 – сигналы разрешения включения счётчиков в работу. А0 – А1 – младшие разряды шины адреса, предназначены для выбора одного из счётчиков или регистров управляющего слова.
Таблица 6 – Сигналы при обмене информацией между МП и ПТ
|
Операции |
Сигналы управления |
||||
|
WR |
RD |
CS |
A1 |
A0 |
|
|
Запись УС в регистр управления таймером |
0 |
1 |
0 |
1 |
1 |
|
Загрузка СТ0 (D0 – D7) |
0 |
1 |
0 |
0 |
0 |
|
Загрузка СТ1 |
0 |
1 |
0 |
0 |
1 |
|
Загрузка СТ2 |
0 |
1 |
0 |
1 |
0 |
|
Чтение из СТО0 |
1 |
0 |
0 |
0 |
0 |
|
Чтение из СТО1 |
1 |
0 |
0 |
0 |
1 |
|
Чтение из СТО2 |
1 |
0 |
0 |
1 |
0 |
|
Отключение программы таймера |
1 |
1 |
0 |
* |
* |
Работа ПТ (программируемого таймера) в режиме “0”:
- В этом режиме таймер работает как реле времени с замкнутыми контактами для формирования выходного сигнала DOUT.
- Вводится управляющее слово.
- Вводится в счётчик этого канала число – количество тактов сигнала SYN, после отработки которых должен появляться сигнал DOUT.
- В результате ввода числа в счётчик сигнал DOUT не изменяется.
- После подачи сигнала EN счётчик начинает обратный счёт от введённого числа до 0.
- Когда показатель счётчика становится равным 0, тогда по предыдущему фронту сигнала синхронизации появляется сигнал DOUT=1:
- Сигнал DOUT снижается до 0 , если сигнал EN=0.
- Сигнал DOUT сбрасывается на 0 при новой загрузке числа в счётчик. Число в счётчик необходимо заносить каждый раз.
Работа ПТ в режиме “1” (режим ждущего мультивибратора). Мультивибратор – это 2-х каскадный генератор прямоугольных колебаний. Ждущий мультивибратор или одно вибратор – это схема, которая реагирует на входной импульс и изменяет своё состояние на 1 цикл или на несколько циклов, а поэтому делится на одно вибратор без перезапуска (как в таймере), и одно вибратор с повторным автоматическим перезапуском. Время автоматического перезапуска обычно устанавливается с помощью RC – цепочки.
Работа:
- Загружает в канал УС.
- Вводит в счётчик число N (N=4).
- При вводе числа в счётчик выходной сигнал DOUT=1.
- При подаче сигнала EN и переднего фронта сигнала синхронизации, сигнал DOUT снижается до 0.
- Число в счётчике в этом режиме остаётся при подаче (съёме), а затем подачи сигнала EN циклы повторяются.
Режим “2” - программируемый делитель частоты со скважностью в один такт выходного сигнала по линии 5 и 6.
Режим “3”. Это режим меандра (генератор меандра). Т.е. делит исходную частоту на равные полу периоды, если число N, на которое необходимо разделить чётное. А если число N нечётное, тогда полу периоды отличаются на один такт сигнала синхронизации.
Режим “4”. Строб с программируемым запуском. Одиночный строб.
Режим “5”. С перезапуском этого строба через время, которое внесено числом в таймер. Строб.
При составлении программы для таймера необходимо иметь в виду следующее:
- Вводить УС для счётчика СТ2, затем для СТ0, потом для СТ1.
- Вводится младший байт числа в СТ1.
- Вводится старший байт числа в СТ1.
- Вводится младший байт числа в СТ2.
- Вводится старший байт числа в СТ2.
- Вводится младший байт числа в СТ0.
- Вводится старший байт числа в СТ0.
7.4 Устройство прямого доступа к памяти (ПДП)
В проектируемой МСУ ПДП используется для вывода информации на индикаторы, т.е. при работе оператора с клавиатурой. В устройство ПДП входит:
а) генератор с частотой 1200 ГЦ на элементах R25, C1, DD1.1, DD1.2. Эта частота непрерывно подаётся на вход триггера DD3 верхнего и через 2 инвертора DD1.3, DD1.4 на счётчик DD6 (Один инвертор использован для развязки сигналов, другой для возвращения сигнала в исходное состояние, т.е. для согласования сигнала);
б) 2 триггера DD3 верхний и нижний;
в) счётчик DD6, который формирует непрерывно и поочерёдно на выходах адреса 8 ячеек ОЗУ с номерами от 000 до 111;
г) регистр DD8, который защёлкивает данные одной из 8 ячеек ОЗУ на определённый цикл (его выходы соединены с сегментами всех 8 матриц);
д) дешифратор DD7, который поочерёдно по коду на входе от счётчикаDD6 выдаёт сигнал низкого уровня на один из 8 выходов (эти выходы подключены к 8 катодам матриц);
е) элементы DD5.2, DD5.3, DD5.4, которые служат для соединения шины адреса устройства ПДП (3-х линий от счётчика DD6) к 3-м линиям шины адреса МСУ, т.е. А0, А1, А2;
ж) часть элемента DD13, который служит для отключения 3-х линий шины адреса МП А0, А1, А2 от МП на время ПДП;
з) элемент DD4.2, который служит для блокировки ввода в МСУ сигналов INTвнешний и HOLD (запрос на захват шин от DD3), т.е. если поступает сигнал INTвнешний, то сигнал запроса HOLD не будет формироваться (в исходном состоянии на верхний вход DD4.2 поступает U=1, через разъём Х1, триггер DD3 при запросе HOLD выдаёт U=1, т.е. в этом случае на выходе DD4.2 появляется U=0, который будет поступать дальше на МП);
и) элемент DD5.1, осуществляет аналогичную блокировку между сигналами HOLD от DD3 и HOLDвнешний. На вход RES МП DD2 и на вход инвертора DD1.5 поступает сигнал напряжения а, от кнопки RESET. В исходном состоянии этот сигнал равен 0, а при нажатии кнопки RESET он равен 1. При U=1 происходит сброс триггера на входе МП для запроса HOLD и INT. Этот сигнал сброса проходит также элементы DD1.5, DD4.1, DD2.1 и поступает на вход S нижнего триггера DD3. А с инверсного выхода этого триггера сигнал поступает на вход R верхнего триггера и сбрасывает его.
Перед выбором данных или адреса или обозначения регистров на дисплей они вначале программно заносятся в 8 первых ячеек ОЗУ с адресом 000Н до 007Н. Эти 8 ячеек ОЗУ и 8 индикаций дисплея работают попарно, с 1-ой ячейки ОЗУ данные всегда выводятся на 1-й индикатор, а с 8-й ячейки ОЗУ на 8 индикатор. Вывод данных из 8 ячеек ОЗУ на дисплей происходит в режиме ПДП. Вывод данных на дисплей в режиме ПДП производится при мультиплексорной работе индикаторов.
Клавиатура МСУ содержит 25 клавиш и один тумблер. 24 клавиши образуют матрицу 3х8. Сканирование клавиатуры – идентификация нажатой клавиши осуществляется по методу сканирования. Сущность этого метода состоит в следующем: клавиатура в виде матрицы 3х8. Сканирование может быть кодированное, когда используют дешифратор адреса по одному размеру матрицы, если её размер равен 8 или обычное сканирование. Программным путём поочерёдно на одной из линий МСУ 13, 14 или 15 выставляется сигнал U=0, а на других линиях равный 1. Сигналы идут начиная с меньшего номера разряда.
8 Устройство вывода сигналов на ИМ, графопостроитель и печать
Блок вывода данных на исполнительные механизмы (ИМ), печать и графопостроитель содержит три группы устройств: для вывода управляющих сигналов на ИМ, для вывода данных на печать и для вывода данных на графопостроитель (или другой самописец).
Параллельный интерфейс DD1 используется для управления ИМ и выдачи данных на печать, а именно: порт В (В0 – В7) – 8 выходов обеспечивают вывод 8 управляющих сигналов на ИМ (для 8 нереверсивных ИМ), а порт А и порт С (А0 –А7 и С0, С1, С4 и С5) обеспечивают обмен сигналами управления и вывод данных на цифропечать через элементы согласования (по току и напряжению) DD2, DD3.1, DD3.2, DD4, DD5 и через разъём Х5. Данные выводятся через порт А элемента DD1, а управление выводом на печать осуществляется через порт С с помощью ГИ, СТО, ГП и ЗП.
Параллельный интерфейс DD6 используется для вывода данных на графопостроитель и на ИМ, а именно: семь линий выхода порта С (С0 – С6) обеспечивают вывод сигналов на ИМ, через выводы порта А (А0 – А7) поступает 8 – разрядный цифровой код технологического параметра на цифроаналоговый преобразователь (ЦАП) DD7 типа К572ПА1А, а через выводы порта В (В0 – В7) поступает 8 – разрядный цифровой код другого технологического параметра или текущего времени на другой ЦАП DD9.
Цифроаналоговые преобразователи DD7 и DD9 имеют следующие выводы: D0 –D9 – входы для ввода цифрового кода; вход 15 – ввод опорного напряжения; вход 16 – ввод сигнала обратной связи; выходы О1- О2 – выводы прямого и инверсного выходного аналогового сигнала. Для формирования опорного напряжения, поступающего на DD7 и DD9 по линиям 19, используется усилитель DD11 типа К140УД7, резисторы R1, R2, R3 и стабилитрон VD. Резистором R1 задаётся смещение на входе 2 DD11 по отношению к потенциалу на входе 3 и величина опорного напряжения. Постоянство потенциала на входе 3 DD11 обеспечивает стабилитрон VD. Усилители DD8 и DD10 преобразуют бинарные сигналы от ЦАП в унарные сигналы. Эти сигналы представляют две текущие координаты, которые по линиям 17 и 18,
линию групповой связи и через разъём Х4 подаются на два электропривода двух координат графопостроителя (или другого самописца). Инвертор DD3.3, триод VT1 и электромагнит YA1 предназначены для подъёма пера самописца при его холостом ходе. Сигнал для управления подъёмом пера поступает по линии 20 из параллельного интерфейса DD6 и выхода С7.
Вывод управляющих сигналов на реверсивные ИМ может производиться через интерфейсы DD1, DD6 и триггеры DD12 и аналогичные им. На реверсивные ИМ подаются из МСУ сигналы управления 0 или 1 по двум линиям, например, по линиям 1 и 2, 3 и 4 и т.д. Триггер DD12 служит для защёлкивания управляющих сигналов, выдаваемых из интерфейсов, а также для исключения одновременной подачи сигналов, равных 1, при включении ИМ на открытие и закрытие. При поступлении, например, по линии 1 сигнала управления U=1 от интерфейса DD1 и по тактовому сигналу, поступающему на вход С, срабатывает верхний D-триггер DD12 и на прямом выходе 5 формируется сигнал U=1. На инверсном выходе 6 сигнал изменяется от 1 до 0, поступает на R – вход нижнего триггера и сбрасывает его в нулевое положение (именно по изменению сигнала от 1 до 0 сбрасывается триггер). В этом случае на выходе 9 нижнего триггера устанавливается U=0, а на инверсном выходе 8 напряжение изменяется от 0 до 1 и поступает на R – вход триггера DD12. Однако при таком изменение сигнала на R – входе триггер не сбрасывается, а остаётся в том же состоянии, которое было ранее, то есть в единичном состоянии. Если после этого интерфейс DD1 на линию 1 выдаёт сигнал U=0, тогда на выходе 5 U=0, а на входе 6 сигнал изменяется от 0 до 1, а поэтому переключение нижнего и верхнего триггеров не происходит. Если приходит сигнал U=1 по линии 2 , тогда процесс срабатывания нижнего триггера и блокировка по верхнему триггеру аналогичны процессу при поступлении сигнала по линии 1.
Транзисторы VT1, VT2 и другие предназначены для усиления сигналов по мощности, достаточной для срабатывания слаботочных электрических реле KV1 или KV2. Диоды VD1 и VD2, подключённые параллельно обмоткам реле, обеспечивают более чёткий возврат их в исходное состояние при съёме сигналов с баз транзисторов. Разность потенциалов на обмотках реле в этом случае мгновенно выравнивается после закрытия триодов. Переключатели SA1, SA2 и другие позволяют переводить управление с автоматического на дистанционное, КМ1, КМ2 и другие магнитные пускатели подводят три фазы электропитания на электродвигатели ИМ. Тепловые реле КК1 и КК2 защищают электродвигатель ИМ от перегрузки или работы на двух фазах. Предохранители FU1 – FU3 защищают электрическую сеть от коротких замыканий в силовой цепи ИМ. Таким образом, для управления реверсивным ИМ используется два триггера, а для управления нереверсивным ИМ – один триггер.
ЦАП содержит 10 электронных усилителей со входами 4, 5 – 13 и выходами на общие линии 1 и 2 и делитель напряжения на резисторах R1 – R20. Делитель напряжения формирует 10 уровней потенциалов и подаёт их на усилители. Каждый усилитель – это один очередной разряд 10 – разрядного кода числа, подаваемого на ЦАП, который выполняет как бы роль включателя соответствующей ступени делителя напряжения к выходным линиям.
9 Функционирование подсистем автоматизированного участка
В разрабатываемой микропроцессорной системе автоматического управления процессом сборки имеются различные подсистемы контроля и управления, которые в зависимости от времени переходного процесса при регулировании параметра относятся к различным группам.
В зависимости от принадлежности датчика к той или иной группе организуется последовательность опроса и сбора информации датчиков технологических параметров и вывод управляющих сигналов на ИМ МСУ.
Для обслуживания подсистем при непрерывной работе МСУ вводится следующая подпрограмма инициализации таймеров:
MVI A, 95H; - загрузить в аккумулятор код УС для CT2 DD17
ОUT D01BH; - вывести код УС для CT2 DD17 в регистр УС DD17
MVI A, 15H; - загрузить в аккумулятор код УС для CT0 DD17
ОUT D01BH; - вывести код УС для CT0 DD17 в регистр УС DD17
MVI A, 55H; - загрузить в аккумулятор код УС для CT1 DD17
ОUT D01BH; - вывести код УС для CT1 DD17 в регистр УС DD17
<аналогично вывод всех УС для счетчика DD18:>
MVI A, B5H;
ОUT D017H;
MVI A, 15H;
ОUT D017H;
MVI A, 55H;
ОUT D017H;
<аналогично вывод всех УС для счетчика DD19:>
MVI A, B5H;
ОUT D00FH;
MVI A, 35H;
ОUT D00FH;
MVI A, 75H;
ОUT D00FH;
<аналогично вывод всех УС для счетчика DD20:>
MVI A, 35H;
ОUT D00FH;
MVI A, 18H; - загрузить в аккумулятор младший байт числа для CT1 DD17.
ОUT D019H; - вывести число 18 в CT1 DD17.
MVI A, 25H; - загрузить в аккумулятор младший байт числа для CT2 DD17.
ОUT D019H; - вывести число 25 в CT2 DD17.
MVI A, 10H; - загрузить в аккумулятор число для CT0 DD17.
ОUT D018H; - вывести число 10 в CT0 DD17.
<аналогично ввод чисел в DD18:>
MVI A, 53H;
ОUT D014H;
MVI A, 08H; - младший байт числа
ОUT D016H;
MVI A, 01H; - старший байт числа
ОUT D016H;
MVI A, 48H;
ОUT D014H;
<аналогично ввод чисел в DD19:>
MVI A, 98H; - младший байт числа
ОUT D00DH;
MVI A, 02H; - старший байт числа
ОUT D00DH;
MVI A, 50H; - младший байт числа
ОUT D00EH;
MVI A, 04H; - старший байт числа
ОUT D00EH;
MVI A, 48H; - младший байт числа
ОUT D00CH;
MVI A, 01H; - старший байт числа
ОUT D00CH;
<аналогично ввод чисел в DD20:>
MVI A, 75H; - младший байт числа
ОUT D004H;
MVI A, 08H; - старший байт числа
ОUT D004H;
RET - возврат в основную программу.
9.1 Формирование и вывод управляющих сигналов на ИМ
Управление ИМ осуществляется портом В параллельного интерфейса DD1 и портом С интерфейса DD6 (лист 5) и интерфейсом DD4.
Алгоритм формирования и выдачи управляющих сигналов на ИМ представлен на рисунке 4.
Рисунок 4 - Алгоритм формирования и выдачи управляющих сигналов
на ИМ
Алгоритм ввода данных от ИП представлен на рисунке 5.
Рисунок 5 - Алгоритм ввода данных от ИП
Выводы
В данном курсовом проекте была разработана микропроцессорная система автоматического контроля установки пиролиза изношенных шин с теплообменниками в реакторе и питающем бункере. Модули и блоки, рассмотренные в курсовом проекте, согласованы для работы в комплекте с микропроцессором КР580ИК80А. Эта система включает в себя блок нормализации сигналов от датчиков и ввода их в УВМ; блок микропроцессора СУ; блок клавиатуры, индикации и формирования векторов прерывания; устройство вывода сигналов на исполнительные механизмы, графопостроитель и печать.
В ходе проектирования была разработана функциональная схема автоматизации, которая включает в себя подсистемы автоматического управления давлением и амплитудой переменного давления в реакторе путем изменения подвода рециркулируемых газов в нижнюю часть этого реактора; автоматического регулирования уровня материала в реакторе; автоматического управления выгрузкой твердого остатка пиролиза из нижней части реактора; систему автоматического регулирования температуры пиролиза изношенных шин в реакторе путем изменения подвода части пиролизного газа в топку; автоматического регулирования уровня материала в обогреваемом бункере; автоматического контроля расхода пиролизных газов, выходящих из верхней части реактора и динамического расхода рециркулируемых газов в реакторе.
Список использованных источников
- “Микропроцессорные САУ”, под ред. В.А. Бесекерского, Л.: Машиностроение, 1988 г., 365 стр.
- Н.И. Жежера “Микропроцессорные САУ”, учебное пособие, Оренбург, 2001 г., ОГУ, УМО.
- А.С. Клюев, Б.В. Глазов “Проектирование систем автоматизации технологических процессов”. Cправочное пособие, М.: Энергоатомиздат, 1990 г., 464 стр.
- “Микропроцессорное управление технологическими объектами микроэлектроники”, под редакцией А.А. Сазонова, М.: Радио и связь, 1988 г., 264 стр.
- Интегральные микросхемы: Справочник / Б.В. Тарабрин, Л.Ф. Лунин, Ю.Н. Смирнов и др.; Под ред. Б.В. Тарабрина. – М.: Радио и связь, 1984 – 528 с.
- Микропроцессоры и микропроцессорные комплекты интегральных микросхем: Справочник: В 2 т. / Н.Н. Аверьянов, А.И. Березенко, Ю.И. Борщенко и др.; Под ред. В.А. Шахнова. – М.: Радио и связь, 1988. – Т. 1, 2. – 368 с.
- Нефедов А.В. Интегральные микросхемы и их зарубежные аналоги: Справочник в 6 томах. – М.: ИП РадиоСофт, 2001. – 608 с.
- СТ0. Стандарт предприятия. Общие требования и правила оформления выпускных квалификационных работ, курсовых проектов (работ), отчетов по РГР, по УИРС, по производственной практике и рефератов. Оренбург: ОГУ, 2010 – 62 с.
- Усатенко С.Т., Каченюк Т.К., Терехова М.В. Выполнение электрических схем по ЕСКД: Справочник. – 2-е изд., перераб. и доп. – М.: Издательство стандартов, 1992. – 316 с.
- Материалы лекций.
- Материалы практических занятий
Чертижи:
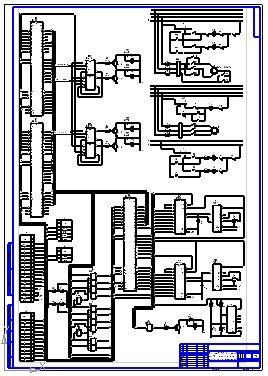
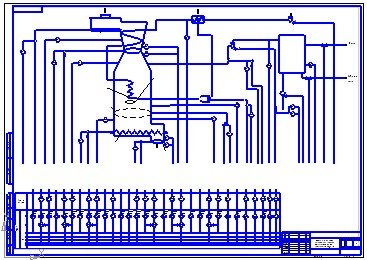
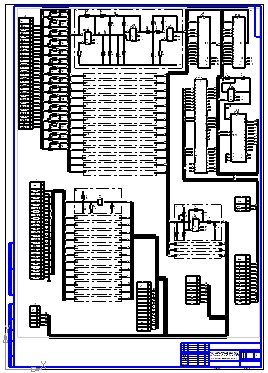
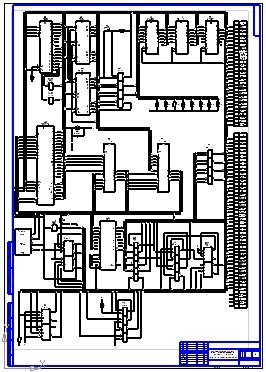
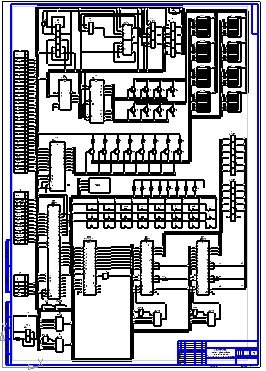
Скачать: