Если для большинства типов самолетов установилась монопланная схема, то для вертолетов из большого разнообразия различных схем практика до сих пор не отобрала наиболее рациональную.
Классифицировать схемы вертолетов можно по самым различным признакам, например по виду привода несущего винта, по числу винтов, по их расположению и т. д., однако удобнее всего исходить из метода компенсации реактивного момента несущего винта. По этому признаку можно назвать шесть основных схем: одновинтовая схема с рулевым (хвостовым) винтом; двухвинтовая соосная схема; двухвинтовая продольная схема; двухвинтовая поперечная схема; многовинтовая схема;
схема с реактивными двигателями (или соплами), установленными на лопастях несущего винта.
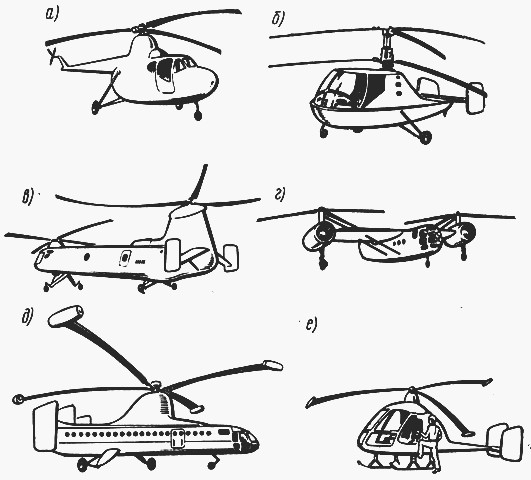
Одновинтовая схема с рулевым винтом предложена Б. Н. Юрьевым в 1911 г. и в настоящее время имеет наибольшее распространение. Компенсация реактивного момента несущего винта осуществляется тягой, развиваемой винтом меньшего диаметра, установленным на конце хвоста фюзеляжа (рис. 152, а).
Имеются вертолеты, у которых для компенсации реактивного момента вместо хвостового винта используется реактивная тяга отработавших газов двигателей или воздуха, отбираемого от компрессора. Однако две последние схемы не получили широкого распространения главным образом из-за потери управляемости аппаратом во время снижения его с авторотирующим несущим винтом при отказе двигателя, а также из-за значительных потерь мощности двигателя в полете.
У вертолетов соосной схемы (рис. 152, б) два противоположно вращающихся винта, расположенных друг над другом, имеют общую ось вращения. Поскольку геометрические размеры и форма лопастей, углы атаки и число оборотов верхнего и нижнего винтов одинаковы, то реактивные крутящие моменты их взаимно уравновешиваются.

Продольно-поперечное управление вертолета соосной схемы осуществляется с помощью автомата перекоса, отклонение которого вызывает одновременный наклон плоскостей вращения обоих несущих винтов. Путевое управление достигается дифференциальным изменением углов установки лопастей верхнего и нижнего винтов. Возникающая при этом на несущих винтах разность крутящих моментов вызывает поворот вертолета в требуемую сторону. Часто для улучшения путевого управления вертолет соосной схемы снабжают рулями поворота, действие которых подобно действию аналогичных рулей на самолете.
У вертолета продольной схемы (рис. 152, в) два несущих винта, установленных на концах фюзеляжа (тандем). В полете винты вращаются с равными скоростями в противоположные стороны, вследствие чего взаимно уравновешиваются их реактивные крутящие моменты. Для избежания при горизонтальном полете вредного влияния переднего винта на задний плоскость вращения последнего располагается выше плоскости вращения переднего винта. Обычно расстояние между осями несущих винтов меньше их диаметров. В таком случае говорят, что винты работают с перекрытием. При перекрытии обязательна синхронизация вращения винтов, исключающая столкновение лопастей. Синхронизация вращения винтов необходима и для взаимного уравновешивания крутящих моментов Mкр. Продольно-поперечное управление вертолетов соосной схемы осуществляется с помощью наклона колец автоматов перекосов. Кроме того, продольное управление обычно дополняется дифференциальным изменением общего шага несущих винтов. Путевое управление осуществляется путем дифференциального отклонения автоматов перекосов в разные стороны.
Вертолеты двухвинтовой поперечной схемы (рис. 152, г) имеют два несущих винта, разнесенные по бокам фюзеляжа. Винты вращаются в разных направлениях с одинаковыми оборотами, за счет чего уравновешиваются реактивные крутящие моменты. У вертолетов поперечной схемы для крепления несущих винтов рационально применять крыло, что значительно улучшает летные характеристики аппарата, так как крыло разгружает несущий винт. Для уменьшения поперечных габаритов вертолета несущие винты иногда устанавливают на фюзеляже очень близко друг к другу. В этом случае лопасти одного винта проходят над втулкой соседнего винта, оси же вращения винтов наклонены во внешние стороны. Такие вертолеты получили наименование двухвинтовых вертолетов поперечной схемы с перекрещивающимися винтами. В этой схеме должна быть обеспечена надежная синхронизация вращения обоих винтов, полностью исключающая возможность столкновения лопастей.
Поступательное перемещение вертолетов поперечной схемы достигается путем циклического изменения шага обоих несущих винтов. Повороты вокруг вертикальной оси производятся наклоном автоматов перекосов в противоположные стороны. Например, для того чтобы произвести правый разворот, плоскость вращения правого винта наклоняется назад, а левого — вперед. Поперечное управление осуществляется дифференциальным изменением общих шагов несущих винтов.
Для вертолетов с большим полетным весом приемлемой может оказаться схема с несколькими несущими винтами — многовинтовая схема. Однако сложность конструкции трансмиссий и управления пока ограничивает возможность создания вертолетов с числом несущих винтов более двух.
У реактивных вертолетов на лопастях несущего винта устанавливают реактивные двигатели или сопла, создающие тягу (рис. 151, д и е). Благодаря этому крутящий момент создается непосредственно на несущем винте и реактивный момент на корпус вертолета почти не передается. Каких-либо устройств для уравновешивания реактивного крутящего момента не требуется, а поэтому реактивные вертолеты строятся по наиболее простой одновинтовой схеме. Отпала также необходимость в установке сложной и громоздкой трансмиссии для передачи мощности на винт. По этим причинам реактивные вертолеты в сравнении с вертолетами с механическим приводом имеют более простую конструкцию, больший полезный объем грузовых и пассажирских кабин. Однако на пути создания реактивных вертолетов стоят такие трудности:
сложность создания реактивных двигателей, удовлетворительно работающих в поле больших центробежных сил; большой расход топлива;
при установке двигателей на лопастях ухудшаются аэродинамические характеристики несущего винта, что особенно сказывается на режиме авторотации;
сложность конструкции втулки и лопасти несущего винта вертолета с компрессорным приводом.
Продольно-поперечное управление реактивного вертолета осуществляется с помощью наклона плоскости вращения несущего винта автоматом перекоса, а путевое — с помощью рулей направления, установленных в воздушном потоке от несущего винта. Некоторые конструкции реактивных вертолетов имеют хвостовые винты, но они служат только для обеспечения путевого управления, а поэтому имеют небольшие размеры и потребляют незначительную мощность.
Используемая литература: "Основы авиации" авторы: Г.А. Никитин, Е.А. Баканов
Скачать реферат:
Пароль на архив: privetstudent.com