Пневматические преобразователи. В этих преобразователях широкое распространение получили распределители типа сопло-заслонка, работающие по принципу дросселирования. Статическое равновесие преобразователя определяется его схемой (рис. 15.25). При перемещении заслонки - от сопла увеличивается количество выпускаемого в атмосферу воздуха и уменьшается значение рвых, а с уменьшением зазора в управляющем устройстве сопло-заслонка значение рвых будет увеличиваться. Значение рвых изменяется пропорционально перемещению заслонки и изменению значения параметра. Перемещение заслонки весьма незначительно, поэтому между измерителем и преобразователем вводятся рычажные или шарнирные связи. При использовании пневматических преобразователей и рычажных связей увеличивается значение статической ошибки, которая будет больше, чем в системе, работающей по принципу открыто — закрыто.
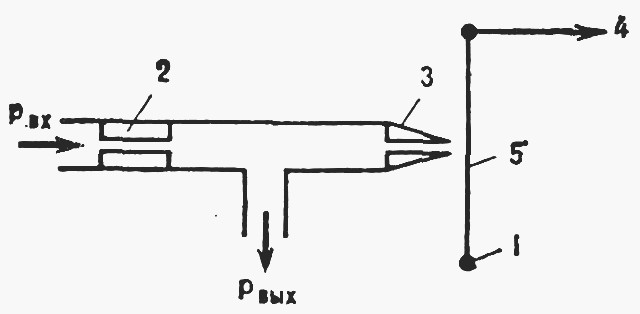
Рис. 15.25. Пневматический импульсный преобразователь:
1 — точка опоры; 2 — дроссель постоянного сечения; 3 — сопло; 4 — к измерителю; 5 — заслонка
Повысить точность поддержания параметра можно введением в преобразователь сильфонной обратной связи, воздействующей на заслонку в сторону, обратную действию измерителя (рис. 15.26). Сигнал действительного значения параметра воздействует на один конец рычажной заслонки, преодолевая при этом затяжку пружины регулирующего устройства, по которой определяется заданное значение сигнала. На другой конец рычажной заслонки передается воздействие от сильфонной обратной связи и сопла. Если под действием измерителя заслонка приближается к соплу, то значение рвых увеличивается. Увеличивается при этом и давление воздуха в сильфоне обратной связи, благодаря чему возникает противодействие перемещению заслонки к соплу, что приводит к ограниченному перемещению заслонки относительно сопла, т. е. обратная связь отрицательная. Равновесие системы наступает при изменении рвых на меньшее значение. Статическая ошибка преобразователя может регулироваться смещением точки опоры рычажной заслонки.
Пневматические преобразователи применяются для увеличения мощности или расширения диапазона измерений выходного сигнала при дистанционном управлении работой механизмов и систем.
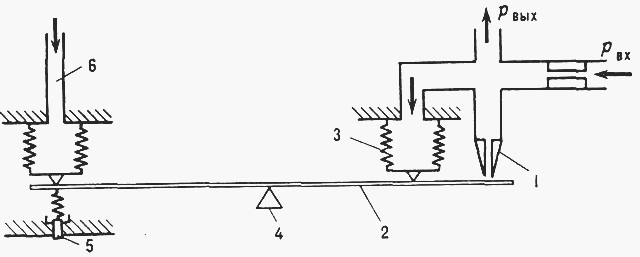
Рис. 15.26. Пневматический преобразователь с обратной связью:
1 — сопло; 2 — рычажная заслонка; 3 — сильфон обратной связи; 4— точка опоры; 5 — настроечный винт; 6 — трубопровод выходного сигнала от измерителя
Пневматические преобразователи также используются в устройствах, в которых производятся математические операции с сигналами: сложение, вычитание, деление. Такие устройства называются сумматорами или передающими вычислителями.
Электрические преобразователи. Принцип действия простых электрических систем основан на изменении сопротивления электрических цепей благодаря чему изменяются напряжение или сила тока. Эти изменения регистрируются показывающими приборами, шкала которых отградуирована в соответствующих единицах измерения.
В преобразователях других типов используется изменение разности потенциалов, которое после усилителя подается к реверсивному электродвигателю, снабженному показывающим прибором; при новом установившемся режиме работы системы разность потенциалов равна нулю.
Схема использования электродвигателя переменного тока в следящей системе показана на рис. 15.27. Оба ротора электродвигателя замкнуты на одну силовую сеть. Обмотки статоров соединены по схеме «звезда», и когда оба ротора находятся в одинаковом положении, то э.д.с. статоров равны и противоположно направлены, а ток в цепи синхронизации отсутствует. Если при работе системы регулирования изменится положение ротора сельсин-датчика, то э.д.с. будут равны, но сдвинуты по фазе. В цепи статоров появятся уравнительные токи и ротор индикаторного сельсин-приемника переместится синхронно с ротором сельсин-датчика. Смещение ротора индикаторного сельсин-приемника регистрируется показывающим прибором.
Силовая уравновешивающая схема может использоваться в качестве преобразователя (рис. 15.28). При изменении входного сигнала рвх происходит деформация приемного сильфона и смещение сердечника магнитной системы приемного устройства, что вызывает изменение магнитного поля блока измерения. В результате этого изменится значение тока на выходе из усилителя. Этот ток поступает к катушкам индуктивности рычажной обратной связи, появляется усилие, ограничивающее смещение сердечника при изменении рвх, что вызывает ограниченное изменение выходного сигнала преобразователя при новом установившемся режиме работы.
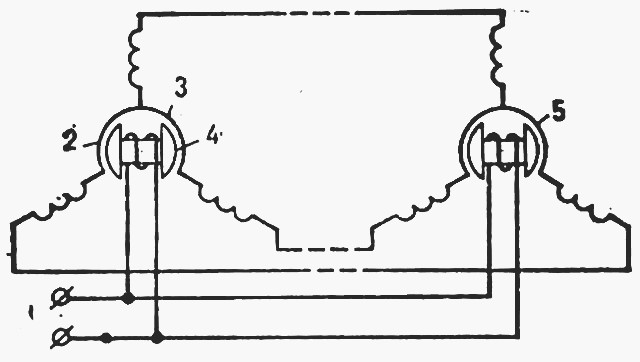
Рис 15.27. Индикаторная передача сигналов:
1 — питание переменным током; 2 — сельсин-датчик; 3 — статор; 4—ротор; 5—сельсин-приемник индикаторный
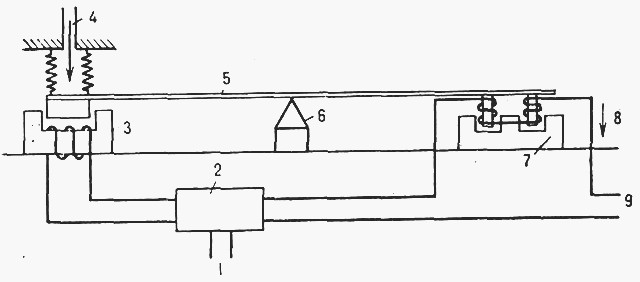
Рис. 15.28. Схема силового баланса электронного преобразователя:
1 — источник переменного тока; 2 — генератор колебаний и усилитель; 3 — электромагнит; 4 — патрубок для передачи переменного давления рвх от измерителя; 5 — рычаг; 6 — точка опоры; 7 — электромагнит; 8 — действие усилия обратной связи; 9 — выходной сигнал
Используемая литература: "Основы судовой техники" Автор: Д.А. Тейлор
Скачать реферат:
Пароль на архив: privetstudent.com