КУРСОВОЙ ПРОЕКТ
Система циклового программного управления четырех ИМ технологического оборудования машиностроения при пятикратной повторности движения ИМ и 14 тактах в цикле
Аннотация
Пояснительная записка содержит 25 страниц, в том числе 1 таблицу, 2 источника. Графическая часть выполнена на 3 листах формата А1.
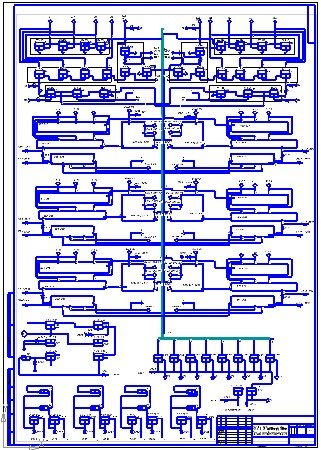
В курсовом проекте приведены основные положения по устройству и принципу действия системы циклового программного управления, рассмотрена работа блока формирования команд (БФК) исполнительных механизмов, блока тактового управления (БТУ), блока задания режимов работы системы управления (БРР).
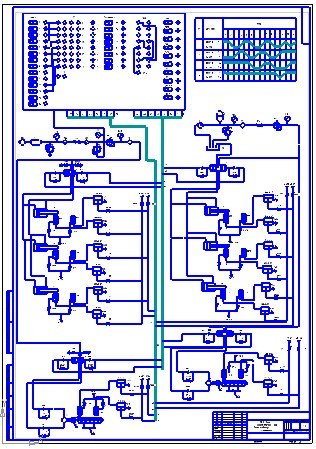
Дано описание панели набора программ (ПНП), схемы управления гидропневматическими исполнительными механизмами, а также проведен анализ последствий при неисправностях элементов в системе управления (СУ): разрыве мембран и потери проводимости элементов. Выполнены расчеты по выбору гидронасоса, гидроцилиндра и трубопроводов. Проектируемая система управления является универсальной и позволяет управлять 4 ИМ, осуществлять 4 повторных движения любого ИМ в одном цикле, автоматизировать технологический процесс (ТП) до 14 тактов в цикле.
Содержание
Введение…………………………………………………………………………………5
1 Основные положения по устройству и принципу действия разработанной системы циклового программного управления ИМ……………...…………….....….6
1.1 Блок формирования команд управления исполнительными механизмами..…....7
1.2 Блок тактового управления……………...…………………….……………...…....8
1.3 Блок задания режимов работы в системе управления…….………………….......9
1.4 Панель набора программы системы управления...………………………………11
2 Анализ последствий от неисправностей элементов в системе управления..….....12
2.1 Анализ последствий в системе управления при потере проводимости элементов……………………………...………………………………………………..12
3 Расчеты по выбору гидроагрегатов и трубопроводов системы управления….....13
3.1 Расчеты по выбору гидроцилиндра………………………………...……………..13
3.2 Расчеты по выбору гидронасоса…….…………………………………………….15
3.3 Расчеты по выбору трубопровода систем управления……...………………..….16
Выводы……………………………………………………………………………..…..22
Список использованных источников………………………………………….……..23
Приложение………………………………………………….………………………...25
Введение
Система циклового программного управления исполнительными механизмами (ИМ) технологического оборудования в машиностроении является одной из типовых, которая используется в промышленных роботах и другом автоматизированном оборудовании. Система может управлять как пневматическими, так и гидравлическими исполнительными механизмами возвратно-поступательного или вращательного движения. Эта система может быть использована на различных уровнях управления, т.е. позволяет проектировать иерархические системы управления (СУ).
Проектируемая СУ является одной из универсальных и позволяет управлять от одного до пятидесяти ИМ, осуществлять от одного до нескольких (не более десяти) повторных движений любого ИМ в одном цикле, автоматизировать технологический процесс (ТП) с числом тактов в цикле от двух до нескольких десятков. Система управления позволяет осуществить перепрограммирование СУ на другую циклограмму, другое количество тактов в цикле, которое может быть меньше, чем запрограммировано в системе.
Система управления позволяет обеспечить работу в следующих режимах:
- АУ - автоматического управления;
- ДУ - дистанционного управления;
- ЗИП - занятие исходного положения;
- ПАУ-ШАГ - полуавтоматического (пошагового) управления по тактам;
- ЦИКЛ0-ЦИКЛ1 - позволяет включить СУ на многократную отработку циклов или выполнение одиночного цикла соответственно.
СУ построена на основе модульного принципа, и поэтому может быть расширена до необходимых размеров. СУ спроектирована на основе одно-мембранных пневматических элементах системы НЭМП-30 (набор элементов мембранной пневмотехники модификации 30).
1 Основные положения по устройству и принципу действия разработанной системы циклового программного управления ИМ
Система циклового программного управления включает в себя следующие блоки и модули:
1 Блок формирования команд (БФК ИМ):
- модуль памяти (общий);
- модуль ограничения;
- модуль «программируемой И»;
- модуль ДУ-ЗИП;
- модуль индикации положения ИМ;
- модуль формирования задержки сигнала по времени (пневматический таймер);
- модуль ИЛИ;
2 Блок тактового управления (БТУ):
- промежуточные модули БТУ;
- первый модуль тактов и модуль запуска БТУ;
- конечный модуль тактов и модуль конца цикла;
- модуль индикации тактов;
3 Блок режимов работы системы управления (БРР СУ):
- модуль ввода сигналов ПУСК-СТОП;
- модуль ввода сигналов ЦИКЛ0-ЦИКЛ1;
- модуль ввода сигналов АУ-ДУ;
- модуль ввода сигналов ЗИП;
- модуль ввода сигналов ПАУ-ШАГ.
Разработанная система циклового программного управления ИМ основана на одномембранных пневматических элементах системы НЭМП-30 (набор элементов мембранной пневмотехники модификации 30).
1.1 Блок формирования команд управления исполнительными механизмами
Блок формирования команд включает в себя следующие модули: модуль ограничения, модуль ИЛИ, модуль памяти, модуль ДУ-ЗИП, модуль «программируемой И», модуль индикации ИМ, модуль задержки сигнала по времени.
Модуль «программируемой И» предназначен для выработки сигнала Р=1, если все ИМ заняли исходное положение. Сигнал с этого модуля снимает ранее поданный в СУ сигнал ЗИП. Этот сигнал с модуля поступает также на модуль индикации. Штуцеры X1-Х8 - это штуцеры, которые выводятся на ПНП и должны быть в соответствии с заданием заглушены определенным образом.
Модуль ограничения предназначен для ограничения по давлению сигнала, поступающего с БТУ (снижает до 0,32). Уровень сигнала Р=0,32 называется уровнем передачи информации от БТУ к БФК ИМ при переходе СУ на следующий такт. Этот сигнал поступает к следующему модулю ИЛИ, модулю памяти и т.д., и приводит к перемещению подвижных частей ИМ. Когда подвижные части ИМ доходят конечного положения, срабатывают конечные выключатели и формируется сигнал, например на штуцере Вход Х1, равный 1. На штуцер А1.1 поступает сигнал равный 1, этот сигнал называют сигналом приема информации от БФК ИМ к БТУ. По этому сигналу БТУ переводит систему управления на следующий такт.
Модуль ИЛИ предназначен для формирования и выдачи на модуль памяти ИМ сигнала равного 1 при поступлении на вход одного из нескольких сигналов равных 0,32 от модуля ограничения БФК ИМ.
Модуль памяти предназначен для взаимной блокировки выходных сигналов, то есть исключает появление на обоих входах одновременно сигналов равных 1, а также обеспечивает запоминание кратковременного воздействия оператором на кнопку ДУ, то есть обеспечивает перемещение подвижных частей до КВ. При поступлении на один из входов модуля сигнала Р=1, модуль не может изменить состояние выходных сигналов до тех пор, пока входной не будет снят.
Модуль ДУ-ЗИП. В проектируемой СУ, в БРР СУ имеется модуль АУ-ДУ (автоматическое - дистанционное управление). Сигналы от модуля АУ-ДУ являются подготовительными, по этим сигналам ИМ никаких движений не совершает, а только переводится в режим АУ-ДУ. В БРР имеется также модуль ввода сигналов ЗИП (задание исходного положения) для ИМ. Этот модуль при воздействии на кнопку ЗИП формирует сигнал Р=1 на штуцере ЗИП0, который выведен на панель набора программы (ПНП). Сигнал ЗИП снимается после того, как все ИМ займут исходное положение, специальным модулем программируемой И. В блоке БФК ИМ в схемах всех движений всех ИМ имеются свои модули ДУ-ЗИП, которые реагируют на сигналы ДУ и ЗИП от БРР. Каждый ИМ проектируемой СУ имеет (кроме общей кнопки ДУ в модуле ДУ-АУ БРР СУ) также по две кнопки (на каждое движение ИМ). При нажатии на кнопки ДУ в модуле ДУ-ЗИП БФК ИМ формируется сигнал Р=1, поступающий на модуль памяти, который осуществляет соответствующее перемещение соответствующего ИМ. Сигнал от конечного выключателя поступает на модуль программируемой И и в модуль ДУ-ЗИП, формируя на штуцере Выход ЗИП Х1 сигнал Р=1.
Модуль индикации положения ИМ выполнен на основе индикаторов поршневого типа, которые представляют собой две зоны: видимую и невидимую. Поршень под действием проходящего воздуха может смещаться в одну или в другую зону, сигнализируя о наличии или отсутствии сигнала, о движении вперед или назад.
Модуль формирования задержки сигнала по времени (пневматический таймер) предназначен для формирования задержки сигнала по времени для точного соблюдения длительности такта, независимо от того совершили ли ИМ движения ранее установленного времени. В СУ этот таймер должен быть подключен своим штуцером к штуцеру БТУ того такта, на котором нужна задержка.
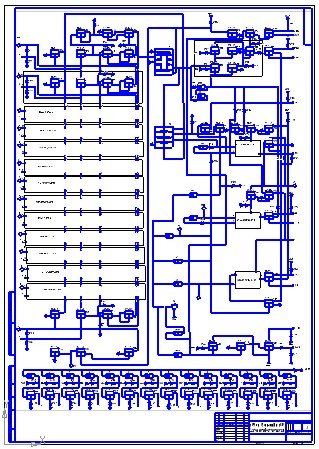
1.2 Блок тактового управления
Блок тактового управления (БТУ) в СУ предназначен для формирования команд перехода СУ от одного такта к другому, после того как предыдущий такт завершен, т.е. все ИМ совершили необходимые движения или сработал таймер, если он подключен. Штуцеры модуля тактов выведены на ПНП. К штуцерам тактов присоединены штуцеры а, б..., от которых подаются сигналы на индикаторы тактов.
БТУ содержит промежуточные модули тактов, модуль запуска БТУ и модуль конец цикла БТУ.
Промежуточные модули тактов БТУ предназначены для осуществления перехода СУ на следующий такт. Формируют сигналы на соответствующих штуцерах тактов, которые поступают на БФК, а также принимают сигналы от БФК при завершении движений ИМ для перевода СУ на следующий такт.
Модуль запуска БТУ. При подаче сигнала «Пуск» от модуля ПУСК-СТОП на модуль запуска БТУ, он начинает работу СУ по циклограмме, начиная с первого такта, а сам модуль запуска отключается с помощью пневматических диодов.
Конечный модуль тактов и модуль конец цикла. При отработке последнего такта срабатывает модуль конец цикла, формируя на выходе сигнал Р=1, который поступает на модуль ПУСК-СТОП. В модуле конец цикла имеется штуцер КЦ, который предназначен для управления технологическим процессом, число тактов в котором меньше, чем тактов по БТУ. Например, в СУ, имеющей 10 тактов, необходимо выполнить 7 тактов, тогда штуцер КЦ необходимо соединить со штуцером Такт 8. После выполнения 7 такта срабатывает модуль конец цикла.
Модуль индикации тактов. Работает аналогично модулю индикации положения ИМ.
При автоматизации производственных процессов циклы имеют такты с различной длительностью, и переход СУ с одного такта на другой происходит после определения состояния системы на предыдущем такте (т.е. выполнен этот такт полностью или нет). Такие циклы, автоматы и СУ называются асинхронными. БТУ поочередно отрабатывает все такты, доходит до конечного модуля БТУ, а затем срабатывает модуль конец цикла, который формирует сигнал Р=1. Этот сигнал поступает на усилитель Р1, который снимает питание с БТУ. На БТУ не подается питание, и выходной сигнал с модуля конец цикла также снижается до 0, поэтому усилитель Р1 через некоторое время снова подает питание на БТУ, и цикл работы модуля запуска и первого такта БТУ повторяется, и так происходит на каждом цикле.
1.3 Блок задания режимов работы в системе управления
Состоит из следующих модулей:
- модуль ПУСК-СТОП;
- модуль ПАУ-ШАГ;
- ЗИП модуль;
- модуль АУ-ДУ;
- модуль ЦИКЛО-ЦИКЛ1.
Работу СУ в выше перечисленных режимах обеспечивают усилители Р1, Р2.
Усилитель Р2 предназначен для формировании сигнала ПУСК на БТУ при сравнении сигналов, поступающих с модуля ПАУ-ШАГ или при их отсутствии. Усилитель Р1 предназначен для подачи питания на БТУ. Питание подается только в том случае, если поступает сигнал ПУСК от модуля ПУСК-СТОП.
Модуль ЦИКЛ0-ЦИКЛ1 обеспечивает работу СУ в двух режимах. Режим ЦИКЛ0 обеспечивает непрерывную работу СУ, т.е. при завершении выполнения последнего такта СУ переходит на выполнение первого такта и т.д. При режиме ЦИКЛ1 СУ выполняет только один цикл.
Модуль ПУСК-СТОП содержит стандартный модуль ПУСК-СТОП, модуль инвертирования, два элемента расширения сигналов для кнопок ПУСК-СТОП и два элемента, обеспечивающих ввод сигнала СТОП от модулей конец цикла БТУ и модуля ввода ЦИКЛ0-ЦИКЛ1. Кнопки ПУСК срабатывают только в том случае, если СУ переведена в режим АУ, т.е. сигнал Р=1 от АУ выполняет роль источника питания. По окончании цикла, при выборе режима ЦИКЛ0 модуль ПУСК-СТОП остается в режиме ПУСК, а при выборе режима ЦИКЛ1 модуль ПУСК-СТОП переходит в режим СТОП.
Модуль ЗИП обеспечивает занятие исходного положения ИМ. Модуль выполнен на базе тех же элементов, что и модуль ПУСК-СТОП. При нажатии на кнопку ЗИП, формируется сигнал Р=1 на штуцере ЗИП0, который выведен на ПНП и соединен, согласно закону занятия исходного положения, со штуцером модуля ДУ-ЗИП. Сигналом СТОП служит сигнал Р=1 поступающий на штуцер ИП после того как все ИМ займут исходное положение.
Модуль АУ-ДУ предназначен для включения режимов АУ и ДУ.
АУ - автоматический режим работы (после нажатия на кнопку ПУСК, ИМ будут перемещаться согласно циклограмме самостоятельно). ДУ - дистанционный режим работы используется в основном для настройки системы, поэтому кнопки управления ИМ не выводятся на ПНП (ИМ перемещаются по сигналам, поступающим от кнопок управления ИМ, независимо от циклограммы). Этот модуль выполнен на основе модуля ПУСК-СТОП (АУ=ПУСК, ДУ=СТОП). При нажатии на кнопку ДУ происходит выключение модулей ПАУ-ШАГ, ЗИП. Эти модули будут выключены, только при наличии сигнала СТОП.
Модуль ПАУ-ШАГ предназначен для обеспечения работы СУ в полу-автоматическом режиме (пошаговый, наладочный). Модуль выполнен на основе модуля ПУСК-СТОП. При нажатии на кнопку ПАУ система подготавливается к работе в полуавтоматическом режиме, отключая ПУСК от БТУ. При нажатии на кнопку ШАГ формируется сигнал Р=1, который поступает на усилитель Р2, где он сравнивается с сигналом ПАУ, включая линию ПУСК на БТУ. СУ будет работать в автоматическом режиме, до тех пор, пока будет воздействие на кнопку ШАГ.
1.4 Панель набора программы системы управления
Панель набора программ содержит кнопки, а также индикаторы всех режимов работы СУ: АУ-ДУ, ПАУ-ШАГ, ЗИП, ЦИКЛ0-ЦИКЛ1. Воздействуя на кнопки, оператор переводит СУ в необходимый режим, а индикаторы сигнализируют, какой режим задействован. На ПНП выведены кнопки ПУСК, СТОП (запуск и остановка СУ). Также на ПНП выведены штуцеры и индикаторы тактов БТУ. Индикаторы сигнализируют, какой такт отрабатывает СУ. Штуцеры тактов соединяются определенным образом, согласно циклограмме, со штуцерами повторных движений каждого ИМ, тем самым задается программа перемещений ИМ в определенной последовательности (исходя из технологического процесса, для которого строится циклограмма). На ПНП выведены штуцеры для задания исходного положения. Они должны быть определенным образом запрограммированы, т.е. должны быть соединены между собой и со штуцером ЗИП0, который также выведен на ПНП. Программируются штуцеры ЗИП согласно ИП, который задает порядок занятия исполнительными механизмами ИП. Штуцеры модуля «программируемой И» также выведены на ПНП и должны быть определенным образом заглушены (часть из них), согласно ИП. На ПНП выведены индикаторы положения ИМ, а также кнопки ДУ ИМ. На ПНП выводятся штуцер и индикатор работы модуля формирования задержки сигнала по времени (пневматического таймера). На ПНП также выведен штуцер КЦ с БТУ, который предназначен для управления процессом, число тактов которого меньше, чем тактов по БТУ.
2 Анализ последствий от неисправностей элементов в системе управления
2.1 Анализ последствий в системе управления при потере проводимости элементов
- Э5 - элемент находится в модуле ИЛИ для ИМ1 второе повторное движение вперед. Если этот клапан потеряет проводимость, то ИМ совершит движение вперед и остановится, не сможет совершить движение назад.
- Э8 - элемент находится в модуле ДУ для ИМ1 движение вперед. Если этот клапан потеряет проводимость, то ИМ совершит движение вперед и остановится, не сможет совершить движение назад.
- Э11 - элемент находится в модуле памяти для ИМ1 движение вперед. Если этот клапан потеряет проводимость, то ИМ не сможет совершить ни движение вперед ни движение назад.
- Э15 - элемент находится в модуле ДУ для ИМ1 движение назад. Если этот клапан потеряет проводимость, то ИМ совершит движение назад и остановится, не сможет совершить движение вперед.
- Э17 – элемент находится в модуле ограничения для ИМ1 движение назад. При подачи 2 повторного движения не будет ожидания сигнала о завершении предыдущего движения и сразу будет подан сигнал для движения. В режиме ДУ движение будет выполнено. В режиме ЗИП исходное положение не будет занято. Режимы АУ и ПАУ, так как ЗИП не выполнен вообще не включатся.
- Э11 - элемент находится в модуле памяти для ИМ1 движение назад. Если этот клапан потеряет проводимость, то ИМ не сможет совершить ни движение вперед ни движение назад.
3 Расчеты по выбору гидроагрегатов и трубопроводов системы управления
3.1 Расчеты по выбору гидроцилиндра
Так как зачетная книжка №08070, NN=70
= 1500 H, =400 H, = 0,25 м/с, = 0,35 м/с, = 270 мм.
Н;
Н;
м/с;
м/с;
мм;
N1 - сила, развиваемая гидроцилиндром для преодоления полезного сопротивления при перемещении груза по вертикали или по горизонтали, Н (можно принимать ориентировочно 1кгс =10 Н);
V1, V2 - скорость перемещения штока гидроцилиндра соответственно в одну или другую сторону (вперед-назад, вверх-вниз), м/с.
Выбирают стандартный по ГОСТ 6540-68 ход поршня (в миллиметрах):
мм.
Вычисляют приведенную длину хода поршня по следующей формуле
мм. (1)
Определяют эффективную силу, Н, действующую на шток гидроцилиндра по формуле:
, где (2)
. Принимаем .
Н;
N2 - сила, расходуемая на перемещение массы поршня, штока и одной третьей части массы рабочей жидкости, находящейся в полостях гидроцилиндра и соединительных трубопроводах, Н. Н;
NИН - сила инерции движущихся частей гидроцилиндра и соединенных с ним массы деталей и рабочей жидкости, Н, которую определяют по формуле
где (3)
; (4)
м/ ; (5)
м/ ; (6)
Н. (7)
Н. (8)
Принимаем и . Подставляем все в формулу (2)
Н. (9)
Диаметр поршня гидроцилиндра с односторонним штоком
, где (10)
Н; МПа Па
(11)
Выбираем D по ГОСТ: D = 50 мм, то есть внутренний диаметр гильзы и диаметр поршня гидроцилиндра равны 50 мм.
Диаметр поршня гидроцилиндра D = 50 мм и ход поршня мм не укладываются в область устойчивого движения по таблице 4, поэтому необходимо в проектируемой системе автоматизации и управления станка (робота) предусмотреть дополнительную направляющую для увеличения устойчивости гидроцилиндра и всего подвижного устройства привода.
Вычисляется диаметр штока гидроцилиндра по приближенной формуле
мм (12)
Необходимый типоразмер гидроцилиндра
ЦРГ 32 – 45 22 710 УХЛ4
3.2 Расчеты по выбору гидронасоса
Так как зачетная книжка №10034, NN=34
л/мин; л/мин; л/мин; л/мин; МПа
об/мин
МПа
Определяется фактическая подача гидронасоса при всех одновременно работающих потребителях проектируемой системы управления станка или робота по соотношению
л/мин (13)
Необходимый рабочий объем равен
(14)
При , согласно ГОСТ 13834-80 стандартные рабочие объемы, которые могут быть приняты для гидронасоса, составляют 45,50,56 и 63 .
Определяется максимальное рабочее давление гидронасоса с учетом возможных перегрузок по следующей формуле:
,где (15)
МПа
МПа (16)
Выбираем гидронасос Г12 – 33АМ
, МПа, = 1500 , = 0,83, = 0,76 | =>
л/мин (17)
Проверяем неравенство
Вычисляется мощность , кВт, на валу гидронасоса (приводная мощность) по формуле
, кВт (18)
где DР - перепад давлений между линией нагнетания и линией всасывания гидронасоса, DР = Р1 – РВС, где Р1 -давление нагнетания для выбранного гидронасоса и принимаем Р1=12,5 МПа, а давление всасывания можно принимать РВС=-0,03 МПа, тогда DР=12,5-(-0,03)=12,53 МПа и
кВт. (19)
3.3 Расчеты по выбору трубопровода систем управления
- Назначение трубопровода для подачи рабочей среды: от бака рабочей жидкости до гидронасоса (всасывание).
Длина трубопровода мм.
Расход жидкости л/мин.
Для трубопроводов, присоединенных к гидронасосу на стороне всасывания (для трубопроводов всасывания), систем станков и роботов рекомендуется выбирать скорость движения жидкости, равной 0,5 – 1,5 м/с.
Принимаем допустимую скорость движения жидкости в трубопроводе равную 1,3 м/с (V = 1,3 м/с).
Находим d – внутренний диаметр трубопровода
мм (20)
Находим площадь поперечного сечения трубопровода
(21)
Так как d = 31,351 мм, то условный диаметр трубопровода по ГОСТ 8732 – 78 принимаем равным 32 мм | =>
, ,5
Вычисляем фактическую среднюю скорость рабочей жидкости
м/с (22)
Потери давления на трении по длине круглого трубопровода определяются по формуле Дарси-Вейсбаха
, Па, (23)
где l - длина трубопровода, м;
d - диаметр трубопровода, м;
V - скорость рабочей жидкости в трубопроводе, м/с;
r - плотность рабочей жидкости, кг/см3 (плотность минеральных масел, используемых в системах автоматизации и управления станков и роботов, составляет в среднем около 900 кг/м3);
l - гидравлический коэффициент трения.
Гидравлический коэффициент трения выбирается по таблицам или рассчитывается по формулам в зависимости от режима течения жидкости в трубопроводе - ламинарного и турбулентного. Режим течения жидкости устанавливается экспериментально или по числу Рейнольдса Re (критерию Рейнольдса)
(24)
где V - скорость движения жидкости в трубопроводе, м/с;
d - диаметр трубопровода, м (принимается фактический внутренний диаметр трубопровода);
u - кинематический коэффициент вязкости рабочей жидкости, м2/с.
Для рабочих жидкостей (минеральных масел) систем автоматизации и управления станков и роботов можно принять, что м2/с.
V = 1,3 м/с, d =0,03135 м, м2/с и число Рейнольдса
(25)
Если число Райнольдса Rе < 2300 , тогда режим движения жидкости в трубопроводе ламинарный и коэффициент трения l для трубопроводов вычисляется по формуле
(26)
Подставим все в формулу (23)
Па = 2.739 кПа = 0,00274 МПа.
- Назначение трубопровода для подачи рабочей среды: от гидронасоса к гидрораспределителю (нагнетание).
Длина трубопровода мм.
Расход жидкости л/мин.
Принимаем допустимую скорость движения жидкости в трубопроводе равную 1,5 м/с (V = 1,5 м/с).
Находим d – внутренний диаметр трубопровода
мм (27)
Находим площадь поперечного сечения трубопровода
(28)
Так как d = 21,804 мм, то условный диаметр трубопровода по ГОСТ 8732 – 78 принимаем равным 25 мм | => , ,
Вычисляем фактическую среднюю скорость рабочей жидкости
м/с (29)
Для рабочих жидкостей (минеральных масел) систем автоматизации и управления станков и роботов можно принять, что м2/с.
V = 1,5 м/с, d =0,0218 м, м2/с и число Рейнольдса
(30)
Если число Райнольдса Rе < 2300 , тогда режим движения жидкости в трубопроводе ламинарный и коэффициент трения l для трубопроводов вычисляется по формуле
(31)
Потери давления на трении по длине круглого трубопровода определяются по формуле Дарси-Вейсбаха
Па = 3,333 кПа = 0,003333 МПа.
- Назначение трубопровода для подачи рабочей среды: от гидрораспределителя к баку рабочей жидкости (сливной).
Длина трубопровода мм.
Расход жидкости л/мин.
Для трубопроводов, соединяющих сливные полости гидроаппаратуры с баком рабочей жидкости, (для сливных трубопроводов) скорость движения жидкости принимается равной 1,40 – 2,25 м/с.
Принимаем допустимую скорость движения жидкости в трубопроводе равную 2,0 м/с (V = 2,0 м/с).
Находим d – внутренний диаметр трубопровода
мм (32)
Находим площадь поперечного сечения трубопровода
(33)
Так как d = 26,843 мм, то условный диаметр трубопровода по ГОСТ 8732 – 78 принимаем равным 32 мм | => , ,
Вычисляем фактическую среднюю скорость рабочей жидкости
м/с (34)
Для рабочих жидкостей (минеральных масел) систем автоматизации и управления станков и роботов можно принять, что м2/с.
V = 2 м/с, d =0,0268 м, м2/с и число Рейнольдса
(35)
Если число Райнольдса Rе < 2300 , тогда режим движения жидкости в трубопроводе ламинарный и коэффициент трения l для трубопроводов вычисляется по формуле
(36)
Потери давления на трении по длине круглого трубопровода определяются по формуле Дарси-Вейсбаха
Па = 1,467 кПа = 0,001467 МПа.
Исходные данные и результаты расчетов по каждому участку трубопровода заносятся в таблицу 1.
Таблица 1 - Результаты расчетов трубопроводов
|
№ участка трубопровода |
Длина трубопровода L, мм |
Q, л/мин |
dВН, мм |
Vф, м/с |
Re |
l |
DR, кПа |
|
1 |
780 |
60,2 |
33 |
1,173 |
1359 |
0,055 |
1,041 |
|
2 |
1040 |
33,6 |
24 |
1,238 |
1090 |
0,069 |
3,333 |
|
3 |
520 |
67,9 |
33 |
1,323 |
1787 |
0,042 |
1,467 |
Вывод
Спроектированная система управления является одной из универсальных. Она позволяет управляет четырьмя ИМ, осуществляет пять повторных движения ИМ в течении одного цикла. Реализованы режимы управления, позволяющие производить работу СУ в дистанционном, автоматическом, полуавтоматическом режиме. Имеется режим ЗИП, при котором СУ занимает исходное положение. Также разработаны режимы ЦИКЛ0-ЦИКЛ1, которые позволяют включить СУ на отработку одного или нескольких циклов. Режим ДУ, ПАУ-ШАГ позволяют производить отладку и настройку системы. В СУ предусмотрены блокировки от случайных включений одних режимов при работе других.
СУ дает возможность автоматизации технологических процессов, в которых число тактов и повторных движение такое же как и в СУ или меньше. СУ может управлять электрическими ИМ при помощи специальных преобразователей. Данная система является одной из типовых и широко применяется в промышленных роботах и другом автоматизированном оборудовании.
Список используемых источников
- Жежера, Н.И. Расчеты по выбору гидронасосов, гидроцилиндров и гидравлических и пневматических трубопроводов систем автоматизации и управления: учебно-методическое пособие / Н.И. Жежера. – ИПК, 2008. –38 с.
- Свешников, В. К. Станочные гидроприводы: Справочник / В. К. Свешников, А. А. Усов. – М.: Машиностроение, 1988.-512 с.
Приложение
Чертежи:
Скачать: