Изменение производительности винтовых компрессоров
Плавное изменение производительности винтовых компрессоров обеспечивается путем изменения рабочей длины роторов с помощью фигурного золотника. Золотник составляет часть поверхности цилиндров компрессора и может перемещаться вдоль продольной оси роторов. При выдвижении золотника в сторону окна нагнетания определенная часть роторов соединяется с полостью всасывания. Сжатие паров происходит лишь на части роторов. Геометрическая степень сжатия уменьшается. Конструктивно предусматривается возможность снижения производительности до 10% от номинального значения.
Поскольку уменьшение рабочей длины роторов связано с изменением геометрической степени сжатия, удельные затраты энергии на единицу производительности компрессора возрастают. Немного энергии затрачивается также на холостую работу отключенной части роторов, поэтому энергетическая эффективность компрессора снижается по мере уменьшение производительности. Она зависит также от конструкции компрессора и параметров номинального режима.
Для перемещения фигурного золотника используются электрические гидравлические приводы. Отечественные компрессоры и компрессоры типа S-64 фирмы «Стал» (Швеция) выпускаются с электрическим приводом. Гидравлический привод регулятора производительности предусмотрен на компрессорах фирмы «Кюльаутомат» (ГДР) и компрессорах типа S54 фирмы «Стал». Основными элементами электрического привода являются реверсивный электродвигатель и червячный редуктор. При вращении выходного вала редуктора фигурный золотник перемещается по нему. Управление электроприводом осуществляет система автоматизации. С помощью кнопок электродвигатель можно включать вручную. При остановке компрессора электродвигатель регулятора вращается в сторону уменьшения производительности. В крайних положениях золотника электродвигатель останавливается с помощью конечных выключателей. Такое построение электрической схемы обеспечивает разгрузку компрессора при пуске и предотвращает перенапряжение деталей узла изменения производительности. На случай выхода из строя электропривода предусматривается маховик для изменения производительности компрессора вручную.
Для гидравлического перемещения фигурного золотника используется давление масла. Оно подается в гидравлический цилиндр и перемещает поршень, с которым жестко связан фигурный золотник. В компрессорах типа S54-2E, установленных на судах типа «Остров Русский», «Финский залив», «Охотское море», масло в гидравлический цилиндр подается от встроенного насоса с приводом от вала компрессора. При пуске масляного насоса плунжер разгружающего клапана 1 сжимает пружину и перекрывает канал bс, соединяющий полости В и С гидроцилиндра. В полости В и С масло поступает через обратные клапаны 2 и трехходовые электромагнитные вентили 3, 5. Для изменения производительности с помощью вентилей 3 или 5 открывается сброс масла из соответствующей полости гидравлического цилиндра в. компрессор. Через включенный вентиль 3 из полости С масло перетекает в компрессор. Поскольку в полость В непрерывно подается масло, поршень 4 гидравлического цилиндра перемещается вправо. Вместе с ним передвигается фигурный золотник, уменьшая тем самым рабочую длину роторов. Вентили 3 и 5 включаются по команде регулятора РТ 7416 или вручную.
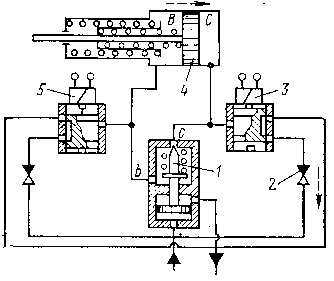
Рис. 1. Схема подачи масла в гидроцилиндр компрессора S54-2F
При остановке компрессора давление масла падает. Плунжер разгрузочного клапана 1 возвращается в исходное положение. Канал bс открывается, сообщая между собой полости В и С. Под действием системы пружин поршень и золотник перемещаются в положение минимальной производительности. Это обеспечивает разгрузку компрессора при пуске. Когда компрессор работает, действие пружин не проявляется, так как масло в полости гидравлического цилиндра поступает через обратные клапаны.
Выпускаемые в ГДР винтовые компрессоры также имеют гидравлический цилиндр и поршень, только масло в цилиндр поступает от автономного насоса гидравлической системы с электрическим приводом. Для подачи масла в соответствующую полость цилиндра используется многоходовой золотниковый распределитель с двумя электромагнитами. Цилиндрический золотник является одновременно якорем обоих электромагнитов. Он имеет кольцевые проточки, внутренний канал и радиальные сверления в трех местах.
Внутренняя полость распределителя имеет цилиндрическую форму с пятью кольцевыми проточками, к каждой из которых подключены внешние линии. По линии П поступает масло от гидравлического насоса. Если включен электромагнит увеличения производительности, то масло, проходя по линии Б в соответствующую полость гидравлического цилиндра, перемещает фигурный золотник в сторону увеличения производительности компрессора. Из противоположной полости гидравлического цилиндра масло возвращается к распределителю по линии М и сливается в бак гидравлической системы по линиям В1 и В2. При нейтральном положении цилиндрического золотника поступающее от насоса масло не направляется в гидравлический цилиндр, а возвращается обратно в бак. Когда включен электромагнит уменьшения производительности, масло по линии М направляется в полость гидравлического цилиндра на увеличение производительности компрессора.
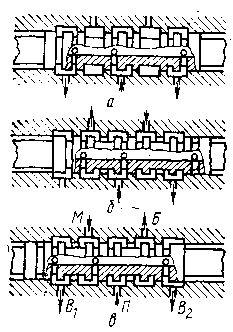
Рис. 2. Движение масла через много ходовой распределитель при трех положениях цилиндрического золотника
Работой электромагнитов управляет дискретно-логическая система автоматизации. Их можно включить также вручную. Электрическая схема построена так, что при одновременном включении обоих электромагнитов производительность компрессоров уменьшается. Автоматическое изменение производительности предусматривается по давлению всасывания.
Фактическое значение производительности компрессора указывается с помощью измерительного потенциометра. Движок его поворачивается пропорционально перемещению поршня гидравлической системы. Преобразование линейного перемещения в угловое производится с помощью скрученного плоского стержня. Потенциометр имеет два конечных выключателя для сигнализации о достижении крайних значений производительности.
Разгрузку компрессора при пуске осуществляет управляющая логическая схема. Она построена так, что сначала запускается насос гидравлической системы, а многоходовой распределитель включается на уменьшение производительности. Электродвигатель компрессора запускается лишь после поступления сигнала о достижении минимальной производительности.
Одним из примеров применения винтовых компрессоров отечественного производства является БАТ «Горизонт», где установлено 6 компрессорных агрегатов 5ВХ-350/5ФС одноступенчатого сжатия. По два агрегата входит в состав двух автономных установок для работы на морозильные аппараты. Отдельные установки предназначены для охлаждения трюмов и производства чешуйчатого льда. Автоматическое изменение производительности винтовых компрессоров всех установок производится по давлению всасывания. Применяется электронный регулятор РПИБ-III, осуществляющий изодромный закон регулирования. Давление всасывания контролируется с помощью дифференциального манометра ДММ-1, 6, который преобразует разность между истинным и заданным давлениями в электрический сигнал.
Чтобы не допустить перегрузки электродвигателя компрессора, предусматривается коррекция мощности с помощью регулятора РПИБ-М. Он контролирует силу потребляемого тока. При увеличении ее до установленного значения регулятор РПИБ-М уменьшает производительность компрессора независимо от команды основного регулятора производительности РПИБ-III.
Регуляторы РПИБ серийно выпускаются Московским заводом тепловой автоматики. Конструктивно они выполняются в виде измерительного и электронного блоков, смонтированных в общем корпусе с габаритными размерами 350X175Х300 мм.
Такие регуляторы предназначаются для регулирования различных процессов. В зависимости от характера регулируемой величины меняются датчик и измерительный блок. Электронный блок остается неизменным.
Датчик Д подает электрический сигнал в измерительный блок ИБ. Регулятор РПИБ-Ill укомплектован дифференциальным манометром ДММ-1,6 и измерительным блоком И-III-62. В комплект регулятора ГПИБ-М входит датчик — трансформатор тока ДТГ-58 и измерительный блок И-М-62. Для настройки заданного значения регулируемого параметра используется задатчик Зд. При наличии отклонения регулируемого параметра от заданного значения на выходе измерительного блока появляется пропорциональное ему напряжение переменного тока, фаза которого зависит от знака отклонения.
Регулирующий пропорционально-интегральный блок РПИ включает суммирующий каскад СК, модулятор МД, триггер ТГ, выходной релейный бесконтактный элемент РЭ, трансформатор обратной связи ТО и устройство упругой обратной связи ОС. Суммирующий каскад сравнивает сигналы измерительного блока и обратной связи. Разность их усиливается и подается в транзисторный модулятор, где преобразуется в прямоугольные импульсы. После дифференцирования в RC-цепочке они управляют триггером с двумя устойчивыми состояниями. Состояние триггера определяет подачу питания на одну или другую обмотку пускового устройства ПУ. Одновременно загорается одна из контрольных ламп, сигнализирующих включение исполнительного механизма ИМ в том или ином направлении. Сигнал выходного элемента РЭ поступает также на трансформатор обратной связи ТО. Устройство обратной связи преобразует его в напряжение, изменяющееся по зависимости апериодического звена первого порядка и поступающее в суммирующий каскад.
Переключатель управления ПК позволяет осуществить управление объектом вручную с помощью ключа дистанционного управления КУ. Исполнительный механизм ИМ представляет собой трехфазный асинхронный электродвигатель с редуктором и концевыми выключателями. Он соединен с указателем положения УП регулирующего органа РО.
Суммирующий каскад и модулятор блока РПИ образуют элемент с зоной нечувствительности, величина которой регулируется с помощью потенциометра. Характеристика триггера имеет петлю гистерезиса, так как при перебрасывании его изменяется нагрузка. В целом блок РПИ представляет собой трехпозиционный релейный элемент с отрицательной упругой обратной связью. Входным сигналом для него является отклонение регулируемого параметрах. Оно усиливается в К раз. Если усиленный сигнал хл превышает половину зоны нечувствительности 0,5ДН, то срабатывает релейный элемент и подает управляющее воздействие хР на исполнительный механизм и. на вход устройства обратной связи. Воздействие обратной связи хо.с изменяется по зависимости апериодического звена с постоянной времени То.с и всегда направлено на уменьшение разности е = х—хо.с
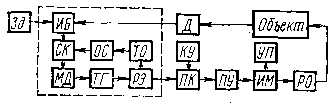
Рис. 3. Блок-схема регулятора РПИБ
Параметры регулятора РПИБ подбираются таким образом, что сигнал обратной связи, хо. с изменяется быстрее, чем отклонение х. Поэтому величина хл начинает уменьшаться. При достижении ею Значения 0, 5АН — л релейный элемент отключает исполнительный механизм. Конденсатор обратной связи начинает разряжаться и сигнал хо. с уменьшается. Поскольку отклонение не ликвидировано, через некоторое время снова включается релейный элемент
Исполнительный механизм интегрирует сигналы релейного элемента. Перемещение регулирующего органа 2 при наличии управляющего сигнала хр происходит с постоянной скоростью. Движение исполнительного механизма в одну сторону характеризуется несколькими повторными включениями. Такой режим называется скользящим.
Частота и длительность управляющего воздействия хр тем выше, чем больше отклонение и выше скорость его увеличения. Ввиду небольшой длительности импульсов и пауз такой регулятор осуществляет пропорционально-интегральный закон регулирования,
В зависимости от свойств регулируемого объекта постоянная времени устройства обратной связи То.с может изменяться в широких пределах с помощью переменных сопротивлений. Благодаря наличию нелинейного элемента в виде неоновой лампы постоянная времени обратной связи при появлении сигнала хР (зарядке конденсатора) получается меньше постоянной времени при разрядке конденсатора. Длительность импульсов управляющего воздействия при неизменной величине постоянной времени можно регулировать путем изменения ширины зоны возврата л. Ширину зоны нечувствительности при настройке регулятора принимают равной примерно половине допустимой величины отклонения регулируемого параметра.
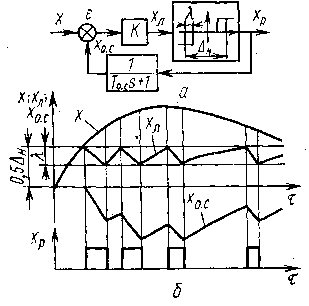
Рис. 4. Блок РПИ:
a — структурная схема; б — переходный процесс
Блочный принцип построения и применение бесконтактного релейного элемента обеспечивают высокую надежность регуляторов РПИБ. Осуществление ПИ-закона регулирования позволяет стабилизировать регулируемый параметр с высокой точностью. Благодаря универсальности и малым габаритам такие регуляторы находят широкое применение при автоматизации различных производственных процессов.
Трехпозиционный элемент используется также в разработанной предприятием «Кюльаутомат» автоматической системе регулирования производительности винтовых компрессоров типа. S3. Регулируемым параметром является давление всасывания р. При отклонениях eго от заданного значения р3 на величину, превышающую зону нечувствительности Ан, на выходе трехпозиционного элемента появляется сигнал I. Он может поступать на один из электромагнитов многоходового золотникового распределителя гидравлической системы, если одновременно поступает разрешающий сигнал от импульсного элемента и нет ограничений из системы управления. Когда контур замкнут поршень гидравлического цилиндра и фигурный золотник компрессора перемещаются с постоянной скоростью, изменяя объемную производительность Vh. Продолжительность одного включения исполнительного механизма не может превышать длительности импульса.
Из-за отсутствия обратной связи между выходом и входом регулятора рассматриваемая система менее совершенна по сравнению с регулятором РПИБ. Однако наличие импульсного элемента делает ее более совершенной по сравнению с обычным трехпозиционным регулятором. Процесс регулирования в ней, как и в регуляторе РПИБ, характеризуется несколькими повторными включениями исполнительного механизма при движении его в одну сторону. Период импульсов ти и длительность их может изменяться в зависимости от динамических свойств объекта регулирования.
Рассмотрим подробнее схему регулирования производительности винтового компрессора S3-900. При изображении и описании схемы используется нумерация функциональных элементов в соответствии с типовой схемой автоматизации построенной на элементах серии Транслог. Номер элемента определяет место его в блоке системы управления соответствующего компрессора. Основу схемы составляют: измерительный мост VI; трехпозиционное звено, образованное элементами V3, V5, V6, V8—VI2; усилители мощности V86, V91 для бесконтактного управления электромагнитами Б и М многоходового гидравлического распределителя; состоящая из элементов V100, V57/ V59схема подачи импульсов и промежуточные логические элементы.
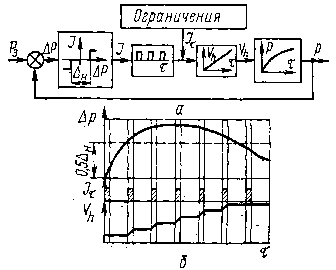
Рис. 5. Автоматическое изменение производительности компрессоров типа S3:
а — блок-схема; б — переходный процесс
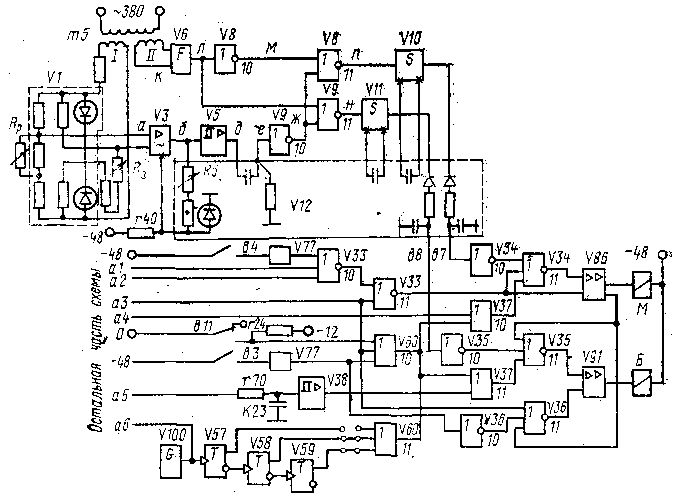
Рис. 6. Схема изменения производительности компрессора: S3-900
В разные плечи измерительного моста включены сопротивления дистанционного датчика Rр и задатчика R3. В качестве дистанционного датчика используется мановакуумметр с потенциометром, имеющим линейную зависимость сопротивления от давления всасывания. Подключение датчика параллельно добавочному сопротивлению позволяет получить примерно одинаковую по температуре кипения зону нечувствительности трех позиционного звена при различных давлениях всасывания. Питание к измерительному мосту поступает от одной вторичной обмотки I трансформатора m5. Для стабилизации напряжения питания моста на уровне 6 В применено дополнительное сопротивление и два кремниевых стабилитрона.
Через резистор r40 и входящие в состав элемента V12 (2D R2) стабилитрон, резистор и потенциометр R6 на выход усилителя V3 подается отрицательное напряжение постоянного тока. Оно накладывается на переменное напряжение так, что срабатывание порогового усилителя V5 (1В21) происходит уже при некоторой амплитуде выходного напряжения моста. Изменяя с помощью потенциометра R6 величину постоянного напряжения, можно регулировать порог срабатывания усилителя V5, а следовательно, и зону нечувствительности трехпозиционного звена.
Проходя через установленную после элемента V5 дифференцирующую цепочку, прямоугольные сигналы д превращаются в остроконечные импульсы е положительной и отрицательной полярности. От отрицательных импульсов на выходе V9/10 появляется нулевой сигнал. В остальное время сигнал ж равен логической единице (—12 В).
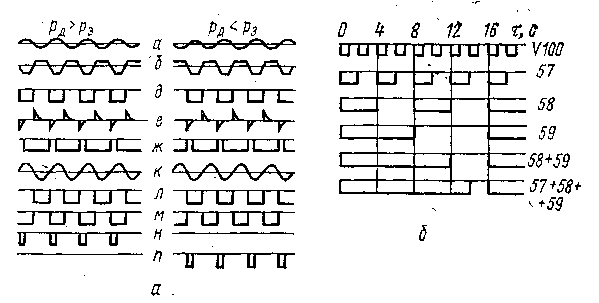
Рис. 7. Диаграмма сигналов: а — трехпозиционного звена; б — схемы импульсов
При отклонении давления всасывания от заданного значения в диагонали моста появляется напряжение переменного тока, фаза которого зависит от знака отклонения, а амплитуда пропорциональна величине отклонения. Сравнение фазы выходного напряжения моста с фазой питающего напряжения, снимаемого со второй обмотки II трансформатора m5 позволяет выбрать направление регулирующего воздействия.
Выходное напряжение а измерительного моста усиливается и сдвигается по фазе на 180° в трехкаскадном усилителе переменного тока V3(2U40), который работает в, режиме ограничения. При достижении установленного значения (около 5В) выходное напряжение б постоянно и не зависит больше от входного напряжения. Коэффициент усиления можно регулировать встроенным в элемент 2U40 потенциометром.
Снимаемое с обмотки 11 напряжение к поступает на нуль-индикатор V6 (2Е01). В нем отрицательные полуволны синусоидального напряжения преобразуются в прямоугольные сигналы л. Они поступают в фазовый детектор, состоящий из двух элементов ИЛИ—НЕ: V8/11 и V9/11. К элементу V9/11, прямоугольные сигналы л поступают непосредственно, а к V8/11—через элемент V8/10, что вызывает сдвиг по фазе на 180°. На вход элементов V8/11 и V9/11 с выхода V9/10 поступают также преобразованные сигналы ж с измерительного моста. В работе фазового детектора могут быть три случая:
1. Истинное давление рд равно заданному р3. Напряжение в диагонали измерительного моста ниже порога срабатывания усилителя V5. В дифференцирующей цепочке остроконечные импульсы не образуются, и на выходе элементов V8/11, V9/11 сигнал равен нулю.
2. рд рз выходное напряжение моста а совпадает по фазе с опорным напряжением к. В момент подачи отрицательных остроконечных импульсов е сигналы в точках ж, л равны нулю, вследствие чего на выходе V9/11 появляются кратковременные сигналы н.
3. рд р3, выходное напряжение моста а не совпадает по фазе с питающим напряжением к. Остроконечные отрицательные импульсы вызывают появление кратковременных сигналов n на выходе V8/11.
Ждущие мультивибраторы V10, V11 (1М20) предназначены для удлинения кратковременных сигналов. После них включена входящая в состав элемента V12 схема, состоящая из диодов, резисторов и конденсаторов. Она сглаживает прямоугольные сигналы так, что на выходах в7, в8 образуются постоянные во времени сигналы 1 или 0. Через сдвоенный элемент V35 (1 NN 11) единичный сигнал с выхода в8 может проходить на усилитель V91, который включает электромагнит Б многоходового распределителя на увеличение производительности компрессора. Сигнал 1 с выхода в7 может поступать на усилитель V86.
Единичные сигналы с выхода в7, в8 проходят на выходы V34/11, V35/11 лишь в том случае, если на выходах V37/10, V37/11 отсутствует сигнал. На входы сдвоенного элемента V37 (1DD03) поступают сигналы от схемы подачи импульсов, выключателя регулирования производительности в 11, конечных выключателей фигурного золотника и защитного сигнализатора давления смазки компрессора. В режиме автоматического изменения производительности сигнал 1 поступает в основном от схемы импульсов, которая включает тактовый датчик V100 (А81) и три Т-триггера V57:V55 (1Z33). Тактовый датчик выдает прямоугольные сигналы с периодом около 2 с. Т-триггеры последовательно удваивают период сигналов. Выходы триггеров могут соединяться в разных сочетаниях с помощью сменных перемычек на входе в элемент V60/11. В зависимости от количества и места установки перемычек изменяется период и соотношение между длительностями сигналов 1 и 0. При наличии перемычек период импульсов составляет 16 с, а длительность. нулевого сигнала равна 4 с. В течение этих 4 с может изменяться производительность компрессора.
Выключатель регулирования производительности в 11 имеет два положения. Когда он включен, происходит падение напряжения на резисторе r 24, и на вход элемента V60/10 поступает нулевой сигнал. Производительность компрессора изменяется автоматически под действием трехпозиционного звена и схемы импульсов. При нажатии кнопки повышения производительности в3 на выходе V60/10 появляется сигнал 1, и действие трехпозиционного регулятора прекращается. Через сдвоенный элемент V36 сигнал 1 от кнопки в3 проходит непосредственно на усилитель V91. Нажатие кнопки снижения производительности в4 сопровождается подачей сигнала 1 через сдвоенный элемент V33 на усилитель V86 и на элемент V34/11. Производительность компрессора уменьшается независимо от сигнала на выходе в7 элемента VI2. Наличие сигнала 1 на выходе также не оказывает влияния, поскольку выходной сигнал усилителя V86 через элементы V35/11 и V36/11 блокирует срабатывание усилителя V91.
Если контакт выключателя в 11 разомкнут, на выходе V60/10 постоянно имеется сигнал 1, что блокирует работу трехпозиционного регулятора. Электромагниты Б и М включаются только при нажатии кнопок в3, в4. Одновременное нажатие обеих кнопок приводит к снижению производительности компрессора вследствие блокирующего действия усилителя V86 на усилитель V91.
Проведенные путем моделирования на аналоговой вычислительной машине МН-7м исследования показали, что для данного объекта рациональная настройка схемы импульсов зависит ют характера внешних воздействий. Если внешнее воздействие имеет вид ломаной линий, то регулируемый параметр колеблется около верхней или нижней границы зоны нечувствительности регулятора. Выход его за пределы зоны нечувствительности тем больше, чем выше скорость изменения входного воздействия и меньше относительная длительность нулевого сигнала на выходе V60/11. При выборе настройки схемы импульсов необходимо учитывать, что сокращение периода импульсов уменьшает погрешность регулирования, но увеличивает частоту срабатываний регулятора, а соответственно и износ трущихся поверхностей и электрических контактов.
По результатам моделирования контура регулирования производительности компрессора ТР «Карл Либкнехт» при периоде внешних воздействий не более 180 с наименьшее количество срабатываний и погрешность регулирования, не превышающая удвоенной зоны нечувствительности регулятора, достигается при длительности периода импульсов 8 с, из которых 2 с составляет нулевой сигнал. Поскольку в реальных условиях внешние по отношению к воздухоохладителю воздействия обычно изменяются медленнее, регулятор производительности достаточно хорошо работает при установленной на заводе длительности периода импульсов 16 с, из которых 4 с составляет нулевой сигнал. Перемещение фигурного золотника компрессора S3-900 из одного крайнего положения в другое при ручном включении исполнительного механизма происходит примерно за 52 с. В автоматическом режиме при одностороннем отклонении регулируемого параметра и указанной длительности импульсов оно произойдет за (52/4) 16 = 208 с.
Когда охлаждающие устройства обладают более высокой инерционностью, а внешние по отношению к ним воздействия не могут изменяться с большой скоростью, целесообразно еще уменьшить относительную длительность нулевого сигнала на выходе V60/10. Для этого необходимо установить все три сменные перемычки. Тогда производительность компрессора сможет измениться на 90% лишь за (52/2) 16 = 416 с.
Используемая литература: Ейдвюс А. И. Системы и средства автоматизации судовых
холодильных установок. М.: Легкая и пищевая пром-сть,
1983.— с.
Скачать реферат:
Пароль на архив: privetstudent.com