Системы управления самолетом разделяются на основные и вспомогательные. К основным принято относить системы управления рулем высоты, рулем направления и элеронами (рулями крепа). Вспомогательное управление — управление двигателями, триммерами рулей, средствами механизации крыла, шасси, тормозами и т. д.
Любая из основных систем управления состоит из командных рычагов управления и проводки, связывающей эти рычаги с рулями. Рычаги управления отклоняются ногами и руками пилота. При помощи штурвальной колонки или ручки управления, перемещаемой усилием руки, пилот управляет рулем высоты и элеронами. Управление рулем направления осуществляется при помощи ножных педалей.
Конструкция управления предусматривает, чтобы отклонение командных рычагов, а следовательно, и изменение положения самолета в пространстве соответствовало естественным рефлексам человека.
Например, движение вперед правой ноги, действующей на педаль, вызывает отклонение руля направления и самолета вправо, перемещение штурвальной колонки вперед от себя вызывает снижение самолета и увеличение скорости полета и т. д.
Для облегчения пилотирования и повышения безопасности полета при продолжительном полете управление большинства гражданских самолетов и, прежде всего, многодвигательных делается двойным. В этом случае систему командных рычагов делают сдвоенной — две пары педалей, две штурвальные колонки или ручки, которые связаны между собой так, что отклонение рычага первого пилота вызывает такое же отклонение рычагов второго пилота.
Система управления самолетов, предназначенных для длительных полетов, снабжается автопилотом, который облегчает пилотирование, автоматически выдерживая заданный режим полета. Для уменьшения нагрузок, действующих на рычаги управления при отклонении рулей современных тяжелых и скоростных самолетов, в систему управления включают гидравлические или электрические механизмы, называемые усилителями (бустерами). В этом случае пилот управляет усилителями, которые в свою очередь отклоняют Рули.
Управление летательных аппаратов, совершающих полеты на больших высотах и в сильно разреженной атмосфере, а также аппаратов вертикального взлета и посадки, когда аэродинамические силы, действующие на самолет, ничтожны и обычные аэродинамические рули неэффективны, осуществляется с помощью струйных или газовых рулей, дефлекторов и отклоняющихся двигателей.
Струйные рули представляют собой реактивные сопла, к которым подводится сжатый воздух от специальных баллонов или от компрессоров двигателя. Управляющими силами в этом случае являются реактивные силы, возникающие в каждом сопле при истечении из него сжатого воздуха.
Газовые рули имеют форму обычного аэродинамического руля, установленного в струе газов, вытекающих из сопла реактивного двигателя. Большая скорость истечения газов позволяет получить значительные силы при сравнительно небольшой площади рулей. Так как рули омываются газами, имеющими высокую температуру, то материалом для их изготовления могут служить графит или керамика. Дефлектор представляет собой устройство, отклоняющее реактивную струю газов. Изменение направления тяги двигателя путем поворота всей двигательной установки требует громоздких и сложных устройств, обладающих большим весом и инерционностью. Привод перечисленных выше рулевых устройств может быть гидравлическим, электрическим и пневматическим.
Конструкция элементов системы управления
Командные рычаги управления. Управление рулем высоты и элеронами производится при помощи ручки управления или штурвальной колонки. Ручка (рис. 64) представляет собой
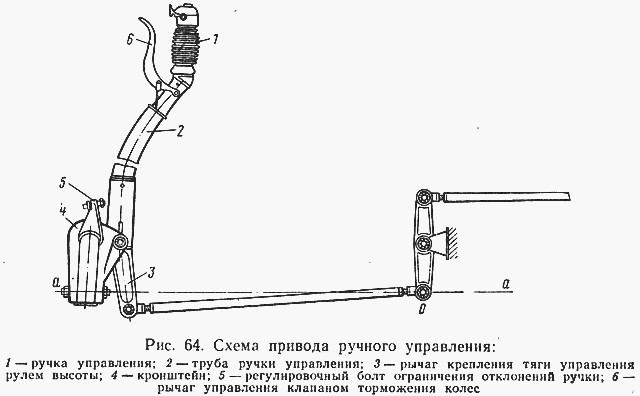
вертикальный неравноплечий рычаг, расположенный перед пилотом и имеющий две степени свободы, т. е. способный поворачиваться вокруг двух взаимно перпендикулярных осей. При движении ручки вперед и назад отклоняются рули высоты, при перемещении ручки влево и вправо (поворот вокруг оси а — а) отклоняются элероны. Независимость действия руля высоты и элеронов достигается размещением шарнира О на оси а — а.
На тяжелых самолетах вследствие большой площади рулей высоты и элеронов увеличиваются нагрузки, потребные для отклонения рулей. В этом случае самолетом удобнее управлять с помощью штурвальной колонки, которая, как правило, выполняется двойной. На рис. 65 изображена штурвальная колонка управления самолетом. Подобных колонок на самолете две: одной управляет командир корабля, другой — второй пилот. Каждая колонка состоит из дюралюминиевой трубы, головки штурвала и нижнего узла — опоры штурвальной колонки, в торцах которого заделаны шарикоподшипники. В нижней части колонки имеется рычаг, к которому присоединяются тяги управления рулем высоты.
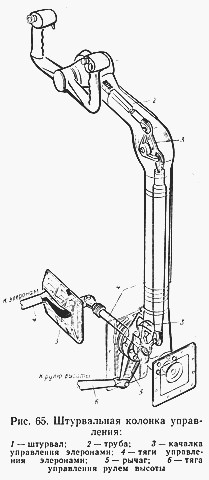
Тяги управления элеронами соединены с качалками, установленными на кронштейнах. На каждом штурвале имеются кнопки управления связной радиостанции, включения и отключения автопилота и нажимной переключатель управления триммером руля высоты.
Для управления рулем направления предназначены педали, которые бывают двух типов: перемещающиеся в горизонтальной плоскости и перемещающиеся в вертикальной плоскости. При горизонтальном перемещении педали движутся по прямолинейным направляющим или на шарнирном параллелограмме, собранном из стальных тонкостенных труб.
Параллелограмм обеспечивает прямолинейное перемещение педалей без их поворота, что необходимо для удобного и неутомительного положения ступни ноги пилота.
Педали, перемещающиеся в вертикальной плоскости, имеют верхнюю или нижнюю подвеску. Положение педалей можно регулировать, подгоняя под рост пилота. На рис. 66 изображен пульт ножного управления, который состоит из трех щек 1, между которыми на штангах 2, соединенных с трубой 8, подвешены педали 4. Каждая педаль специальным пальцем 6, проходящим внутри оси педали, связана с секторной качалкой 5. Верхняя часть секторных качалок тягами 9 и 10 соединена с рычагами горизонтальной трубы 7. На трубе закреплен рычаг 11, к которому присоединяется тяга 12, идущая к рулю поворота. При нажатии, например, на левую педаль (от пилота) повернется секторная качалка 5, которая через тягу 9 вызовет поворот трубы 7 против часовой стрелки. Это движение в свою очередь через тягу 10 вызовет поворот секторной качалки правой педали в противоположную сторону, т. е. назад к пилоту. Пальцы служат для регулировки педалей по росту пилота. Регулирование производится следующим образом: пилот отжимает вбок рычаг защелки 3 и тем самым выводит палец 6 из зацепления с сектором 5. Пружина (на рисунке не показана) поворачивает педаль в сторону пилота.
Проводка управления, как уже указывалось, может быть гибкой (рис. 67, а), жесткой (рис. 67, б) либо смешанной.
Гибкая проводка управления выполняется из тонких стальных тросов, диаметр которых выбирается в зависимости от действующей нагрузки и не превышает 8 мм. Так как тросы могут работать только на растяжение, то управление рулями в таком случае выполняется по двухпроводной схеме. Отдельные участки тросов соединяются при помощи тандеров. Трос к тандерам и секторам крепится посредством коушей и запрессовок (рис. 68). Для уменьшения провисания тросов на прямолинейных участках служат обычно текстолитовые направляющие, в местах перегиба троса устанавливаются ролики с шариковыми подшипниками.
Жесткая проводка представляет собой систему жестких тяг и качалок. Качалки являются промежуточными опорами проводки, которые необходимы для деления тяг на сравнительно короткие участки. Чем короче тяга, тем большее усилие сжатия она может воспринять. С другой стороны, чем больше разъемов у тяг, тем больше вес проводки.
Тяги имеют трубчатое сечение, изготавливаются из дюралюминия и реже из стали. Соединение тяг между собой, а также с качалками осуществляется через наконечники с одним или двумя ушками, в которых вмонтированы шарикоподшипники, допускающие перекос между осями тяг. Отдельные наконечники имеют резьбу для возможной регулировки длины проводки. Для повышения надежности управления каждая тяга выполняется иногда из двух труб, вставленных одна в другую. Основной трубой является наружная, но каждая труба в отдельности может полностью воспринять всю расчетную нагрузку, приходящуюся на эту тягу.
Системы управления с усилителями
С увеличением скоростей, размеров и веса самолетов нагрузки на поверхности управления увеличиваются. Однако эти усилия ограничиваются физическими возможностями пилота и не должны превышать определенных величин, так как могут вызывать усталость при длительном полете в сложных метеоусловиях. Кроме того, при больших усилиях на органах управления (командных рычагах) пилот не может действовать достаточно быстро, что ухудшает маневренность самолета. Утвердилось мнение, что мощная аэродинамическая компенсация и, следовательно, ручное управление, т. е. управление без усилителей самолетом, возможны только при скоростях полета, соответствующих числу М не больше 0,9.
Отказ от использования воздушного потока для уменьшения нагрузок на органы управления (командные рычаги) пилота потребовал установки на самолете достаточно мощного источника вспомогательной энергии. Таким источником в большинстве случаев является самолетная гидросистема, приспособленная для питания бустеров (гидроусилителей), включенных в систему управления самолетом.
С появлением управления, имеющего гидроусилители, отпали трудности, связанные с аэродинамической компенсацией рулей. Отработка системы с гидроусилителями почти не требует летных испытаний и производится полностью на наземных стендах, что дает большую экономию времени и средств. Значительно упрощается применение автопилотов, так как при наличии в системе гидроусилителей можно уменьшить мощность рулевых машинок.
Некоторые конструкции гидроусилителей дают возможность уменьшить и даже полностью устранить весовую балансировку рулей. Однако применение бустеров утяжеляет конструкцию самолета.
В настоящее время применяются две разновидности гидроусилителей: необратимые и обратимые. Необратимыми называются такие усилители, в которых вся нагрузка, приложенная к выходному звену (например, шарнирный момент руля), преодолевается силовым узлом и на ручку управления не передается. Для создания на ручке «чувства» управления производится искусственное нагружение ручки с помощью специальных устройств. Простейшими из них являются пружины с линейной зависимостью усилия от отклонения ручки. Однако такие устройства редко удовлетворяют пилотов, поскольку они, создавая на органах управления одинаковые усилия как при минимальной, так и при максимальной скорости полета, легко могут стать причиной опасной перегрузки самолета при маневре.
Преимущественное распространение получили нагрузочные автоматы, создающие усилие в зависимости от величины скоростного напора и угла отклонения поверхности управления. Такие нагрузочные автоматы, а также некоторые специальные нагрузочные устройства в сочетании с необратимыми усилителями позволяют выбрать наилучшие характеристики управляемости для любого самолета.
Необратимые системы применяются в основном при больших нагрузках на органах управления и в тех случаях, когда нет необходимости создавать на ручке ощущения нагрузки выхода, как, например, в случае управления передним колесом самолета.
На некоторых самолетах, в частности на легких, получили распространение обратимые системы управления, в которых обеспечивается передача известной части аэродинамических нагрузок, действующих на рули, на ручку управления. Подобное управление с пропорциональной чувствительностью на ручке управления уменьшает возможность перегружения конструкции при различных эволюциях самолетов. Кроме того, обеспечивается без центрирующих устройств и вмешательства пилота возвращение свободных рулей в нейтральное положение, что имеет большое значение для сохранения устойчивости самолета.
Обычно на реактивных самолетах, оборудованных обратимой бустерной системой, естественный градиент усилий на рычагах управления получается только в средней части диапазона скоростей: при больших скоростях управление кажется «тяжелым», а при малых — «легким». Этот недостаток устраняется нагрузочным устройством.
Нагрузка от шарнирного момента может быть передана на ручку либо при помощи соответствующей кинематики рычажной системы обратной связи, либо гидравлическим способом.
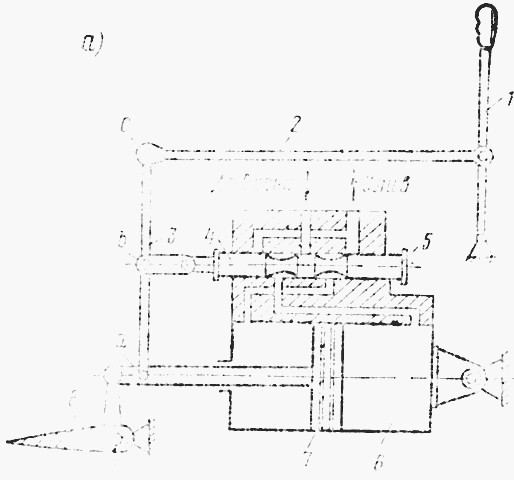
На рис. 71, а изображена одна из схем необратимого гидроусилителя с двигателем (цилиндром) прямолинейного движения. Перемещение ручки управления 1 вызывает движение тяги 2, которая через рычаг 3, поворачивающийся относительно точки а, сместит золотник 4, запирающий пути подвода и слива жидкости, в сторону отклонения ручки 1. В результате жидкость под давлением поступит в соответствующую полость цилиндра 6, будет перемещать его поршень 7 и отклонять рулевую поверхность 8. Переместившийся золотник открывает также каналы для слива жидкости из нерабочей полости цилиндра 6. Если движение ручки 1 будет прекращено, то точка с станет неподвижной и перемещающийся поршень 7 через рычаг 3 сообщит золотнику 4 перемещение, противоположное тому, которое он получал при отклонении ручки 1.
В результате этого количество жидкости, поступающей в цилиндр, будет уменьшаться до тех пор, пока в среднем положении золотника 4 поступление масла не прекратится и скорость поршня станет равной нулю. При смещении золотника в противоположную сторону движение всех элементов регулирующего устройства будет происходить в противоположном направлении.
Механические упоры 5, ограничивающие максимальное отклонение золотника, уменьшают максимальную ошибку, которая может быть введена в систему. Если пилот попытается после того как будет выбран этот свободный ход сдвинуть рычаг со скоростью, превышающей максимальную скорость штока, то развиваемое ручкой усилие складывается с усилием давления жидкости.
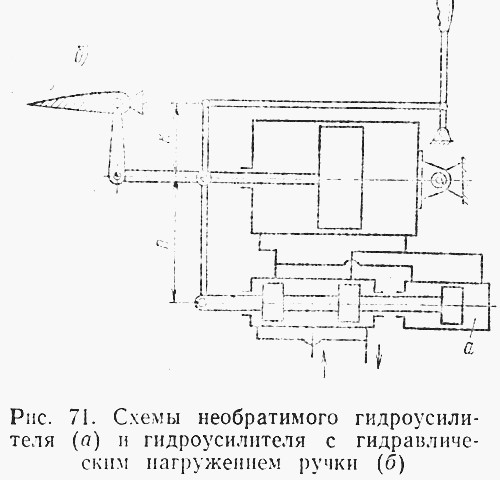
На рис. 71, б изображена схема обратимой системы управления рулем самолета с гидравлическим нагружением ручки управления. Гидравлическое нагружение ручки управления осуществляется с помощью нагрузочного цилиндра а, поршень которого через механизм обратной связи воздействует на ручку. Полости нагрузочного цилиндра соединены с соответствующими полостями основного силового цилиндра: значение нагрузки на ручку определяется площадью поршня цилиндра а, величиной давления жидкости и размерами плеч n и k дифференциального рычага обратной связи.
Для того чтобы находящаяся в силовом цилиндре усилителя жидкость не препятствовала ручному управлению, обе полости цилиндра сообщаются между собой через обводной клапан. При наиболее опасных повреждениях, например заеданиях золотникового распределителя, усилитель должен автоматически отключаться от системы управления для предотвращения ее заклинивания.
Если отказ усилителя произойдет при такой эволюции самолета, когда на рули действует большая нагрузка, то в момент перехода на ручное управление усилия на командных рычагах могут превзойти усилия пилота. Это приведет к произвольному отклонению руля, в результате которого самолет может попасть в опасные условия полета прежде, чем руль будет возвращен в нужное положение. Наилучшим способом устранения такой опасности является непрерывная балансировка шарнирного момента руля при помощи автоматического триммера, независимо от того, включен или выключен усилитель. Для создания «чувства управления» система с автоматическим триммером должна иметь какое-либо нагрузочное приспособление. Для удобства перехода с бустерного управления на ручное в современных обратимых системах принято делить нагрузки между пилотом и усилителем в отношении 1 : 3.
С распространением систем управления с усилителями в них появились новые гидравлические, электрические и сложные механические устройства. Помимо возросшей конструктивной сложности, управление теперь стало зависеть от ряда других самолетных систем. Возникли серьезные практические затруднения в обеспечении надежности управления.
Повышение надежности системы усилителей достигается главным образом путем дублирования отдельных элементов, возможность выхода которых из строя наиболее вероятна, а также путем полного дублирования усилительных установок. Усилители снабжаются устройствами для локализации поврежденных агрегатов с автоматическим переключением их на исправные резервные агрегаты. Одновременно улучшаются аварийные системы перехода на ручное управление в случае полного отказа системы. Применяется также секционирование поверхностей управления с приводом каждой секции от автономной бустерной установки.
Несмотря на ряд улучшений в системах управления с усилителями, применение дублированных гидросистем, преимущество в отношении надежности и веса еще остается за ручной системой управления с аэродинамической компенсацией. Поэтому при проектировании нового самолета с умеренной скоростью (околозвуковой) полета весьма важен правильный выбор системы управления. Особое значение это имеет для пассажирских самолетов. Многие современные пассажирские самолеты имеют ручное управление. Обычное ручное управление с тросовой и жесткой проводкой можно использовать до чисел М = 0,9 даже на самолетах большой грузоподъемности при условии применения внутренней аэродинамической компенсации или пружинных сервокомпенсаторов. Однако на практике для управления во всем диапазоне скоростей полета необходимы некоторые дополнительные устройства: вспомогательные элероны или интерцепторы для улучшения поперечной управляемости при малых скоростях полета;
управляемый стабилизатор для сохранения продольной устойчивости и парирования изменения продольного наклона самолета при больших числах М.
Повышение экономичности транспортных самолетов в настоящее время достигается увеличением размеров самолета и его взлетного веса, который уже сейчас приближается к 450 Т. Следует заметить, что моменты, создаваемые поверхностями управления по мере увеличения веса самолета, становятся все менее эффективными по сравнению с моментами инерции конструкции, поэтому реакция самолета на отклонения поверхностей управления становится неприемлемо малой. В связи с этим можно ожидать в будущем коренных изменений методов управления большими самолетами.
Используемая литература: "Основы авиации" авторы: Г.А. Никитин, Е.А. Баканов
Скачать реферат:
Пароль на архив: privetstudent.com