Датчики, сигнализаторы и регуляторы давления
В соответствии с ГОСТ 19176—80 устройство, преобразующее информацию о состоянии объекта или внешней среды в сигнал установленного уровня, пригодный для дальнейшей обработки в системе управления, называется источником информации. Датчик является источником информации, выходной сигнал которого соответствует текущему значению контролируемого параметра объекта. Сигнализатор — это источник информации, выходной сигнал которого дискретно изменяется при достижении контролируемым параметром объекта заданных значений.
Для преобразования давления среды в перемещение стрелки, рычага или штока используется деформация или изгибающий момент упругих элементов. Такими элементами могут быть металлические и неметаллические мембраны, мембранные коробки и блоки, сильфоны, трубчатые пружины. Перемещение определенной точки их зависит от давления или разности давлений.
Применяемые в судовых холодильных установках устройства для преобразования давления или разности давлений делятся на манометры, датчики, сигнализаторы и регуляторы. В манометрах подвижная точка упругого элемента через систему кинематики соединяется со стрелкой, Если упругий элемент воздействует на движок реохорда, то получается датчик давления с электрическим выходным сигналом. В сигнализаторах давления упругий элемент через систему рычагов и пружин переключает электрические- контакты. Регуляторы давления усилие упругого элемента используют для перемещения затвора и соответствующего изменения расхода протекающей среды. Подробно принцип действия указанных приборов описан в книгах. Ниже приводятся технические характеристики и особенности работы иностранных приборов, широко применяемых на судах.
Сигнализаторы давления и сигнализаторы разности давлений при определенном значении контролируемого параметра переключают контактную систему. Сигнализатор разности давлений срабатывает в зависимости от разности давлений Ар. Двухблочные сигнализаторы давления совмещают в себе сигнализаторы низкого и высокого давлений, воздействующие независимо на одну контактную систему. Параметрами настройки сигнализаторов давления и сигнализаторов разности давлений в любом, случае являются заданное значение давления р3 и величина зоны возврата Ав = 2х, определяемая как разность между верхним р2 и нижним p1 значениями срабатывания. Некоторые сигнализаторы имеют неизменную зону возврата, устанавливаемую на заводё-изготовителе. Наличие кнопки возврата свидетельствует о блокировке контактов после срабатывания прибора. Возвращение контактной системы в рабочее положение осуществляется нажатием этой кнопки. Встречаются сигнализаторы, имеющие кнопку принудительного размыкания электрической цепи. Часть из них описана в книге. Рассмотрим конструктивные особенности сигнализаторов давления двух типов. Сигнализаторы давления типа DW народного предприятия «Мертик» (ГДР) имеют выполненный из нержавеющей стали сильфон 8. С повышением контролируемого давления р сильфон сжимается. Преодолевая усилие пружины 2, шпиндель 7 с Дисками 3 и 6 перемещается вверх. При достижении давления p2 упругая пластина 5 теряет устойчивость и резко меняет положение однополюсной контактной системы 4 на противоположное. С понижением давления р шпиндель 7 опускается вместе с дисками 3 и 6. Упругая пластина 5, выбирая зазор межку дисками 3 и 6, опускается и при давлении p2 — Ав приводит контактную систему 4 в исходное положение. Винт 7 предназначен для настройки давления срабатывания p2 натяжением пружины 2. Поворотом диска 6 изменяют зазор между дисками 3 и 6, что приводит к пропорциональному изменению зоны возврата Ав. Корпус прибора пластмассовый. Сигнализаторы давления типа DW можно применять во взрывоопасных помещениях. Аналогично рассмотренному работают выпускаемые фирмой «Данфосс» (Дания) приборы типа RT.
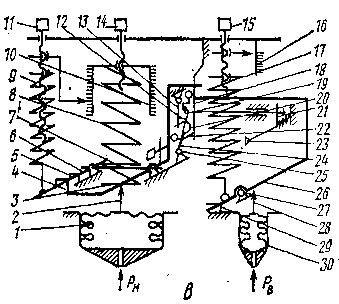
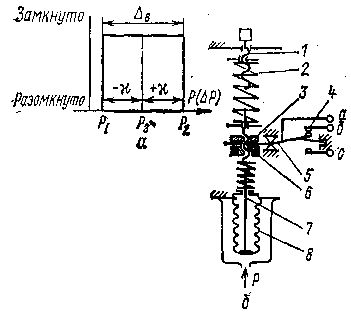
Рис. 1. Сигнализаторы давления: а — характеристика сигнализатора давления; б—сигнализатор давления типа DW612; в — сигнализатор давления типа АР271
Сигнализаторы давления типа АР фирмы «Пенн» (США) имеют несколько модификаций. Силовая система блока низкого давления включает в себя сифон 1 с толкателем 2, платформу 3, пружину 8 и винт 14 для настройки давления срабатывания p1н, рычаг зоны возврата 6, пружину 9 и винт 11 для настройки зоны возврата. Платформа 3 и рычаг 6 могут вращаться вокруг оси 7. Упор 5 ограничивает поворот рычага 6 вверх. При понижении давления рн сильфон 1 сжимается и толкатель 2 с платформой 3 под действием пружины 8 опускается вниз до тех пор, пока левое крыло 4 платформы 3 не ляжет на рычаг. 6. Дальнейшее перемещение платформы 3 вниз произойдет только в том случае, если усилие пружины 8 преодолеет воздействие пружины 9 и давления рн. Как только это условие будет выполнено, правое крыло платформы воздействует на упругую пластину 18. Перемещаясь, пластина 18 прижимает толкатель 22 к упругой пластине контактной систему 24 и поворачивает ее против часовой стрелки относительно точки опоры 25. Пружина 20 резко срабатывает, перемещает рычаг 13 вправо, и тяга 12 размыкает контакты 19. При повышении давления рн на величину зоны возврата Ав контактная система возвращается в исходное положение.

Блок высокого давления включает в себя: сильфон 30 с толкателем 28, вращающуюся вокруг оси 27 платформу 26, пружину 17 и винт 15 для настройки давления срабатывания р2в, упор 29 для ограничения поворота платформы 26. При повышении давления рв сильфон 30 растягивается, перемещая толкатель 28 вверх. Платформа 26, преодолевая усилие пружины 17, поворачивается вокруг оси 27 и при давлении р2в своим верхним крылом воздействует на упругую пластину 18. Контактная система размыкает свои контакты. Настраиваемые значения p1н и р2в указываются на шкалах 10 и 16. Кнопка 23 предназначена для экстренного размыкания электрической цепи путем воздействия на рычаг 21, упругую пластину 18 и контактную систему.
Сигнализаторы разности давлений в отличие от сигнализаторов давления имеют два чувствительных элемента, воздействующих на шпиндель с противоположных сторон. Заданная разность давлений Ар3 в сигнализаторах разности давлений тина МР, RT, DWO и АР настраивается гайкой, изменяющей натяжение пружины, упирающейся в сильфон низкого давления. Зона возврата Ав сигнализаторов типа МР и RT, как правило, не регулируется. Сигнализаторы типа МР и АР имеют встроенное биметаллическое реле времени, обеспечивающее задержку размыкания электрической цепи при понижении разности давлений. Время задержки устанавливается на заводе-изготовителе в пределах 30—120 с. Принцип действия сигнализаторов типа DSM, DFC, DPS такой же, как и рассмотренных приборов. Некоторое отличие их обусловлено особенностями кинематической схемы и контактной системы.
Регуляторы давления в холодильных установках изменяют расход протекающей среды путем изменения площади проходного сечения между седлом и затвором. Они могут быть прямого и непрямого действия. В регуляторах прямого действия для перемещения затвора используется усилие упругого элемента, воспринимающего разность между текущим и заданным значениями давления. Регуляторы давления непрямого действия (пилотные) для перемещения затвора используют энергию проходящей среды. Они состоят из двух частей: регулятора давления прямого действия (пилота) и исполнительного органа (главного клапана). Конструктивно обе части могут быть выполнены по отдельности или в одном корпусе. По назначению различают регуляторы давления: «до себя», «после себя», водорегуляторы. Первые из них стабилизируют давление до регулирующего органа, а вторые — после него. Водорегуляторы поддерживают давление конденсации хладагента путем изменения расхода воды, подаваемой на конденсатор.
Регулятор давления «до себя» типа CVM (CVMP, CVMT) фирмы «Данфосс» является пропорциональным регулятором прямого действия, устанавливаемым только на паровой магистрали после влагоотделителя в любом положении. Стальная мембрана 4 воспринимает давление среды pвх и усилие пружины 3. Повышение давления рвх приводит к прогибу мембраны, увеличению проходного сечения и расхода паров рабочей среды. При понижении давления рвх расход рабочей среды уменьшается.
Аналогичный по конструкции регулятор разности давлений CVMP имеет дополнительно трубопровод, соединяющий надмембранную полость с выходной магистралью. Вследствие этого мембрана прогибается под действием разности давлений рвх— pвых. В модификации GVMT добавлена манометрическая термосистема, установленная в нижней части регулятора и воздействующая на мембрану со стороны низкого давления посредством толкателя. Применение CVMT в качестве регулятора давления кипения позволяет изменять скорость охлаждения объекта. При высокой температуре объекта мембрана отжимается полностью толкателем манометрической термосистемы. При низкой температуре объекта манометрическая термосистема на положение мембраны не влияет и регулирование рвх происходит так же, как в регуляторе СУМ. Настройка регуляторов типа СУМ производится винтом 1, по которому перемещается тарелка 2, служащая верхним упором для пружины 3. Рабочий диапазон давлений регулятора СУМ — от 0 до 700 КПа.
Регуляторы типа СР могут применяться как клапаны постоянного давления «до себя» (СРР), разгрузочные клапаны (CPR), регуляторы пуска (CPL), регуляторы мощности (СРС). Устанавливают их только на паровых линиях хладагентов в любом положении. Затвор 4 в зависимости от назначения регулятора может быть установлен как на нижнее, так и на верхнее седло в корпусе 3. Регуляторы СРР и CPR имеют штуцер для установки манометра, а СРТ — манометрическую термосистему. Принцип действия регуляторов аналогичен описанному ранее. Настройка регуляторов типа СР производится поворотом винта 1. Диапазон рабочих давлений зависит от назначения регулятора и упругости пружины 2.
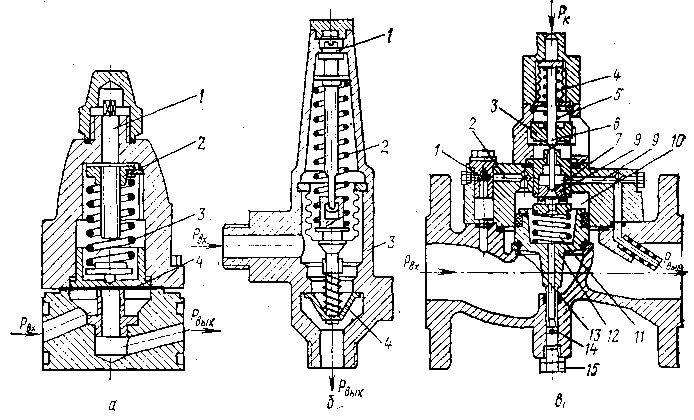
Рис. 2. Регуляюры давления:
а — типа CVM; б — типа СР; в — водорегулятор Типа WVS
Регуляторы типа WV (WVS, WVTS) фирмы «Данфосс» устанавливают на водяном трубопроводе перед конденсатором. Отбор давления конденсации у водорегуляторов WV и WVS внешний, а регуляторы WVTS имеют манометрическую термосистему, преобразующую температуру конденсации в перемещение управляющего затвора.
Водорегулятор WVS относится к регуляторам со встроенным пилотом. Основными элементами пилота являются: сильфон 4, толкатель 6, конусный затвор 7, пружина 5 и гайка 3 для настройки заданного давления рк.з. Исполнительная часть водорегулятора имеет фигурный поршень 12, перемещающийся в цилиндрической полости 10. Поршень 12 одновременно является основным затвором, так как при перемещении его относительно седла 13 изменяется расход проходящей воды. Полость 10 посредством проточек 2 и 9 соединяется с полостями до и после затвора. При повышении давления конденсации рк сильфон 4 сжимается, толкатель 6 с затвором 7 опускается. Расход воды, уходящей из полости 10 через дроссельное отверстие в седле 8 и проточку 9, увеличивается. Поскольку проходное сечение дросселя 1 постоянно, давление в полости 10 уменьшается. Направленное вверх усилие потока с давлением рвх превысит усилие, создаваемое пружиной 11, давлением воды вполости 10 и весом поршня 12. Вследствие этого поршень 12 переместится вверх и расход проходящей воды увеличится. С понижением давления конденсации затвор 7 уменьшает дроссельное отверстие. Давление воды в полости 10 возрастает, и поршень 12 опускается ниже, уменьшая расход проходящей воды. Для принудительного открытия водорегулятора необходимо вывернуть пробку 15 и винт 14. Давление в полости 10 понизится, и поршень 12 переместится вверх независимо от положения затвора 7. адсорбционное (А) наполнение. При газовом и жидкостном наполнении зависимость между температурой и давлением определяется термическим коэффициентом объемного расширения среды. Свойства конденсационного наполнителя определяются термодинамической зависимостью между давлением и температурой в состоянии насыщения. Принцип действия адсорбционного наполнителя основан на поглощении (адсорбции) углекислого газа активированным углем. Количество адсорбированного углекислого газа, а следовательно, и давление его зависят от температуры. Адсорбционный наполнитель имеет практически линейную характеристику, крутизна которой зависит от соотношения количеств адсорбента и углекислого газа.
Одним из приборов с манометрической системой является манометрический термометр, состоящий из манометра и термобаллона, соединенных капиллярной трубкой. В нем изменение температуры преобразуется' в перемещение. стрелки. Если стрелка может замыкать электрические контакты, то получается релейное преобразование температуры в электрический сигнал. Соединяя стрелку с движком реостата, получают линейное преобразование температуры в электрический сигнал. Указанные виды преобразования реализованы, например, в выпускаемых в ГДР электроконтактных термометрах типа 271F80 и термометрах с реостатным преобразователем F16, имеющих ртутное наполнение термосистемы.
При автоматизации холодильных установок широко применяют сигнализаторы температуры. Статическая характеристика сигнализаторов температуры аналогична характеристике сигнализаторов давления.
В зависимости от исполнения термосистемы сигнализаторы температуры бывают дистанционные, местные и камерные. Наличие капиллярной трубки в дистанционных сигнализаторах позволяет размещать корпус прибора и термобаллон в различных помещениях. Местные, сигнализаторы имеют термобаллон, жестко соединенный с корпусом прибора. Термобаллон однако может быть вставлен в трубопровод или аппарат с рабочей средой, в то время как корпус прибора находится в воздухе помещения. Наполнитель термосистемы камерных сигнализаторов находится в трубке, которая соединена с корпусом прибора и имеет обычно вид спирали. Камерные сигнализаторы применяют только для контроля температуры воздуха в помещениях. Рассмотрим работу сигнализаторов температуры основных типов.
Сигнализатор температуры типа TW653. 10 имеет местную термосистему, состоящую из латунного термобаллона 1 и сильфона 2. При повышении контролируемой термобаллоном температуры давление конденсационного наполнителя возрастает. Сильфон 2 сжимается и, преодолевая усилие пружины 3, поднимает шпиндель 9, который диском 8 давит на пластину 5. Предварительно сжатая пластина имеет два устойчивых положения: При определенном положении шпинделя 9 пластина 5 резко прогибается вверх и переключает контактную систему 6. После снижения температуры среды на величину нерегулируемой зоны возврата Ав пластина 5 под действием шпинделя 9 возвращается в исходное положение. Настройка температуры срабатывания t2 производится винтом 7, изменяющим сжатие пружины 3. Более жесткая пружина 4 сжимается только при чрезмерном повышении температуры, предотвращая, тем самым поломку пластины 5.

Сигнализаторы температуры типа TW605 и типа TW612 по кинематической схеме не отличаются от сигнализаторов давления типа DW. Манометрическая термосистема указанных приборов типа TW может быть дистанционной и камерной.
Сигнализатор температуры типа RT фирмы «Данфосс» (Дания) конструктивно совпадает с сигнализатором давления этого типа. Конструкция сигнализатора температуры типа RT с дополнительным индексом L несколько усложнена. В ней на шпинделе 1 укреплены диски 2 и 3, воздействующие на две контактные пружины 7 и 9, которые переключают контакты 6 и 8. Такое дополнение-позволяет применять сигнализатор температуры в качестве трехпозиционного регулятора. Настройка прибора производится винтом 4 по шкале 5. Зона нечувствительности Ан настраивается диском 10. Зона возврата Ав обеих контактных систем близка к 1°С. При установке на шкале 5 температуры + 3, 5°С и настройке зоны нечувствительности Ан = 3°С характеристика прибора имеет вид, показанный на рисунке 2. 3, г. Камерные термосистемы приборов типа RT-4 для сокращения времени реакции могут снабжаться электрическим обогревателем постоянной мощности, устанавливаемым в сильфонной коробке. Электрическая цепь обогревателя замкнута независимо от состояния контактной системы.


Рис. 3. Сигнализаторы температуры с манометрической термосистемой:
а — типа TW653.10; б — типа RT 16L; в — типа L4008; г — характеристика сигнализатора температуры типа RT16L
При повышении температуры контролируемой среды давление в манометрической термосистеме повышается и гофрированная мембрана 6 прогибается, преодолевая усилие пружины 7. Толкатель 10 перемещается влево вместе с цилиндром 9 и освобождает рычаг 11. Под действием пружины 5 рычаг 11 поворачивается по часовой стрелке относительно опоры 12 и своим нижним краем воздействует на шток 3 герметичного микровыключателя. При определенном усилии штока пластина 1 резко прогибается и контакты 4 размыкают электрическую цепь. Для замыкания электрической цепи необходимо нажать кнопку возврата 2. Настройка прибора осуществляется винтом 8. Чтобы исключить конденсацию наполнителя в мембранной коробке, термобаллон при монтаже следует устанавливать ниже корпуса прибора.
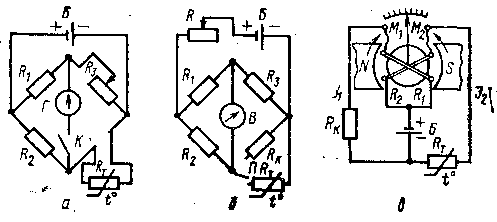
Рис. 4. Включение термометра сопротивления в схему:
а — уравновешенного моста; б — неуравновешенного моста; в — магнито-электрического логометра
Термометры сопротивления используют зависимость электрического сопротивления металлов и полупроводников от температуры. С повышением температуры сопротивление проволочных резисторов возрастает, а полупроводниковых падает. Проволочные терморезисторы чаще всего выполняют из меди или платины. При соответствующем подборе материалов термический коэффициент электрического сопротивления полупроводниковых резисторов получается в несколько раз больше, чем у проволочных. Терморезисторы должны иметь определенное сопротивление при температуре 0°С и одинаковую для данной серии зависимость сопротивления от температуры. Проволочные резисторы легко удовлетворяют этим требованиям, а полупроводниковые имеют индивидуальные характеристики, что затрудняет их взаимозаменяемость.
Для измерения электрического сопротивления терморезисторов используется уравновешенный или неуравновешенный мост или логометр. Основу уравновешенного моста составляют четыре резистора. В одно из плеч моста включается терморезистор RT. Смежное плечо содержит переменный резистор R3. Резисторы R1 и R2 постоянны. Источник постоянного тока Б и нуль-гальванометр Г включаются в противоположные диагонали моста. Кнопка К служит для включения гальванометра. При выполнении равенства R1RT = R2R3 ток в измерительной диагонали равен нулю. Изменение температуры контролируемой среды приводит к изменению сопротивления резистора RT и нарушению равновесия моста, о чем свидетельствует отклонение стрелки нуль-гальванометра. Для восстановления равновесия моста необходимо изменить сопротивление резистора R3 пропорционально RT. Следовательно, в состоянии равновесия моста положение движка реохорда R3 определяется температурой контролируемой среды. Это позволяет нанести шкалу температур. В автоматических приборах вместо нуль-гальванометра используется электронный усилитель, управляющий реверсивным электродвигателем. Электродвигатель перемещает движок реохорда и осуществляет регулирование или включение сигнализации. Чтобы изменение электрического сопротивления проводов при колебаниях температуры окружающей среды не влияло на показания прибора, часто применяют не двух, а трехпроводную схему подключения терморезистора.
Неуравновешенный мост имеет три постоянных резистора R1 R2, R3. В одно из плеч его с помощью переключателя П включается либо терморезистор Rт, либо контрольный резистор RK. Переменный резистор R находится в цепи источника питания Б. Включенный в измерительную диагональ милливольтметр В имеет шкалу температур. Перед началом измерений в схему подключается резистор RK. С помощью резистора R настраивается напряжение питания так, чтобы стрелка милливольтметра находилась напротив контрольного деления шкалы. В процессе измерений переключатель П вводит в схему моста терморезистор Rт. Значение температуры находится непосредственно по показаниям милливольтметра.
Принцип действия логометра основан на измерении отношения сил токов, протекающих в двух цепях, питаемых от общего источника тока. В межполюсном пространстве постоянного магнита NS на общей оси (двух кернах) укреплены две скрещенные и Жестко связанные между собой и указательной стрелкой прибора рамки с сопротивлением R1 и R2, изготовленные из медной проволоки. Рамки включены так, что их вращающие моменты М1 и М2 направлены навстречу друг другу. Эти рамки могут свободно поворачиваться в воздушном зазоре, образованном полюсными наконечниками и цилиндрическим сердечником. Воздушный зазор имеет переменную ширину, и магнитная индукция убывает от центра к краям полюсных наконечников. Подвод тока к рамкам производится с помощью маломоментных спиральных пружинок.
Ток от источника питания проходит по двум ветвям; I — через постоянный резистор RK и рамку R1 II — через терморезистор Rт и рамку R2. Перед источником питания ветви сходятся. При. протекании по рамкам R1 и R2 токов I1 и I2 создаются магнитные поля, в результате взаимодействия которых с полем постоянного магнита возникают вращающие моменты M1, M2. Если RK + R1 =R2 + Rт, то I1 — I2. При симметричном расположении рамок R1 и R2 относительно полюсных наконечников вращающие моменты M1 и М2 равны.
Если сопротивление RT вследствие нагрева терморезистора возрастает, то ток в его цепи I2 уменьшается, В связи с этим будет больше момент M1 и подвижная часть повернется по часовой стрелке. При этом рамка R1 попадает в более слабое магнитное поле и момент M1 уменьшается. Момент рамки R2, наоборот, будет увеличиваться. При определенном положении рамок относительно полюсов вращающие моменты сравняются и рамки остановятся. Таким образом, при любом значении контролируемой температуры стрелка занимает вполне определенное положение. Для повышения чувствительности в реальных схемах рамки логометра R1 и R2 включают в диагональ неуравновешенного моста.
Термоэлектрические преобразователи (термопары) применяют в основном при испытаниях судовых холодильных установок. Они основаны на свойстве металлов и сплавов создавать термоэлектродвижущую силу (ТЭДС) при наличии разности температур спаев, образованных двумя разнородными проводниками. Зная, зависимость, изменения ТЭДС от изменения температуры одного из спаев при постоянстве температуры другого спая и имея электроизмерительный прибор, можно найти искомое значение температуры в месте измерения. В качестве вторичных приборов с термоэлектрическими преобразователями применяют магнитоэлектрические милливольтметры и потенциометры.
Регуляторы температуры и разности температур
Регулирование температуры охлаждаемых объектов на судах производится позиционно с, использованием сигнализаторов температуры или плавно с применением электронных регуляторов, входящих в состав системы управления. Регуляторы температуры прямого действия применяют редко. Некоторое распространение в системах управления процессом оттаивания воздухоохладителей получили регуляторы типа ТР386 (ГДР)-Их устанавливают на подогревателях рассола для стабилизации температуры выходящего рассола.
Регулятор ТР 386. 03 состоит из заполненной жидкостью манометрической термосистемы и исполнительного органа. Датчик 1 имеет латунную гильзу 2, внутри которой находится сильфон 3, предназначенный для изменения внутреннего объема термосистемы при настройке регулятора. Внутренняя полость датчика 1 посредством капилярной трубки 16 соединяется с полостью 15, в которой размещён сильфон 14. При повышении воспринимаемой гильзой 2 температуры давление в термосистеме возрастает. Сильфон 14 сжимается и, преодолевая сопротивление пружины 7, перемещает вверх толкатель 13 и полый шпиндель 9 с затвором 8. Проходное сечение дроссельного отверстия и расход пара уменьшаются. Чтобы давление водяного пара рВх не влияло на процесс регулирования, применяют разгрузку затвора 8 путем, перепуска пара через полый шпиндель 9 в полость 11, образованную сильфоном 10 и элементами корпуса. Для принудительного открывания затвора необходимо осторожно выкрутить винт 12. Давление в полости 11 при этом уменьшится, и затвор 8 несколько опустится. Настройка заданной температуры рассола производится винтом 6, который с помощью шпинделя 4 растягивает сильфон 3, изменяя тем самым давление жидкости в термосистеме. Пружина 5 предназначена для защиты термосистемы от разрушения. Пока контролируемая температура ниже 100° С, пружина 5 не сжимается. При дальнейшем повышении температуры пружина 5 сжимается, ограничивая рост давления в термосистеме.
Широкое применение в суповых холодильных установках находят терморегулирующие вентили (ТРВ). Они предназначены для изменения подачи жидкого хладагента в испарительные системы в зависимости от перегрева паров, под которым понимают разность между температурой отсасываемого пара tn и температурой кипения t0. Температура tn воспринимается термобаллоном и преобразуется термосистемой в давление на упругий элемент. С противоположной стороны упругий элемент воспринимает давление кипения p0, подаваемое по уравнительному трубопроводу из паровой зоны испарительной системы или по проточке в корпусе прибора из его выходного патрубка. В первом случае получаются ТРВ с внешним уравниванием, а во втором — с внутренним.
На судах обычно применяются ТРВ прямого действия. Выпускают также ТРВ непрямого действия (пилотные), обеспечивающие большую пропускную способность при обычных размерах термочувствительной системы. Принцип действия их такой же, как у пилотных регуляторов давления, разница состоит в. тoм, что исполнительным органом управляет ТРВ.
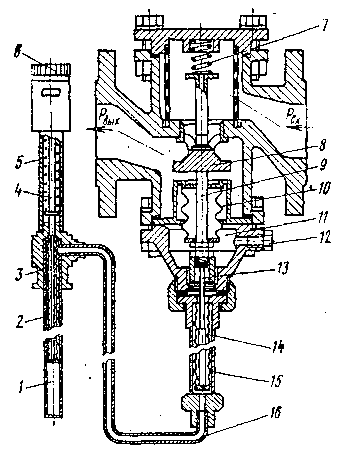
Рис. 5. Регулятор температуры типа ТР386. 01
В судовых холодильных установках применяют ТРВ отечественного и иностранного производства. Описание и технические характеристики отечественных ТРВ приводятся в книгах . Из иностранных наибольшее применение находят ТРВ типов TV и Т фирмы «Данфосс» (Дания). Они имеют адсорбционное или конденсационное заполнение термосистемы. ТРВ типа TV сейчас не выпускают, но на судах они встречаются часто. ТРВ типа Т/ТЕ более универсальные, так как имеют сменные сопла для изменения производительности. Выпускаются они для следующих диапазонов температур кипения: N = —40 / +10°С; В = —55 +-25°С; D = — 50/0°С; К = — 5/+10°С; NM (с МОР) = -40/ —5°С; NL (с МОР) = —40/ —15°С;
В (с МОР) =—60°/-25°С. Код МОР означает, что максимальное давление в термосистеме ограничено благодаря свойствам наполнителя. При высоком давлении кипения ТРВ закрыт, а после снижения давления закрытие его начинается лишь при определенной температуре термобаллона, которая примерно на 5°С выше верхнего значения рабочего диапазона температур. Основные показатели применяемых на судах ТРВ Т/ТЕ приводятся в табл. 3.
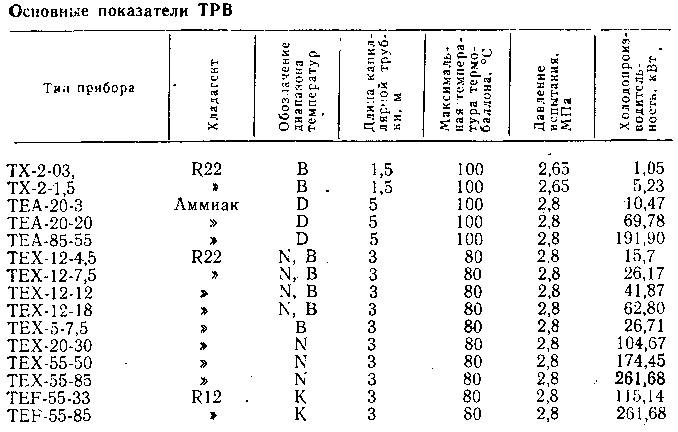
Таблица 3
Буквенные и цифровые индексы в маркировке прибора имеют следующие значения: T(TV) —терморегулирующий вентиль; Е— с внешним отбором давления; F — для работы с R12 (желтая этикетка); X — для работы с R22 (синяя этикетка); У — для работы с R502 (лиловая этикетка); А — для работы с аммиаком (зеленая этикетка). Первая группа цифр обозначает номер сменного сопла, вторая — значение нормальной холодопроизводительности в рефрижераторных тоннах при конкретном значении температуры кипения toi рабочего диапазона, температуры конденсации tк = + 32°С и переохлаждении перед ТРВ 4°С. В частности, для диапазона N температура кипения t0 = +5°С, для диапазона D температура кипения — —15°С и для диапазона В температура to = —30°C. Значение перегрева для ТРВ малой производительности при этом равно 6°С, средней и большой—4°С. Для получения холодопроизводительности в ваттах достаточно значение второй группы цифр увеличить в 3489 раз. Наличие только одной группы цифр указывает на то, что холо-допроизводительность выражена в 1000 ккал/ч.
Рассмотрим для примера работу ТРВ типа ГЕХ-12-20. При неизменном давлении p0 с повышением воспринимаемой термобаллоном 11 температуры пара tn давление в манометрической термосистеме возрастает. Мембрана 4 прогибается, воздействуя на тарелку 3. С противоположной стороны на мембрану действуют пружина 2 и давление кипения p0, подаваемое через штуцер 9 по уравнительной линии. Прогиб мембраны сопровождается опусканием штока 5 с конусным затвором 10 и увеличением проходного сечения дроссельного отверстия и расхода хладагента. Поток дросселируемого хладагента изолируется от подмембрашюй полости с помощью сальников 8. Данный прибор выпускается с настройкой на перегрев 4° С. Изменение заданного значения перегрева производится вращением регулировочного шпинделя 1, поворачивающего с помощью зубчатой передачи колесо 7, которое перемещает гайку 6 вертикально по резьбовому соединению, изменяя степень сжатия пружины 2.
Датчики, сигнализаторы и регуляторы уровня жидкости
Контроль уровня некипящей. жидкости осуществляется достаточно легко. В простейшем случае применяются смотровые стекла. Для дистанционного контроля уровня кипящего хладагента могут быть использованы различные способы. Наиболее распространены поплавковые и температурные датчики. Иногда применяют также емкостные и радиоизотопные датчики. В поплавковых датчиках изменение уровня жидкости преобразуется в линейное перемещение поплавка. Температурные датчики преобразуют изменение уровня жидкости в давление манометрической термосистемы. Действие их основано на различии коэффициентов теплоотдачи от датчика к пару и к жидкости. На базе попдавковых и температурных датчиков изготовляют сигнализаторы уровня с релейной характеристикой и регуляторы уровня с плавной характеристикой. Основные сведения о применяемых на судах сигнализаторах уровня иностранного производства приводятся в табл. 214. Многие из них описаны в книгах.
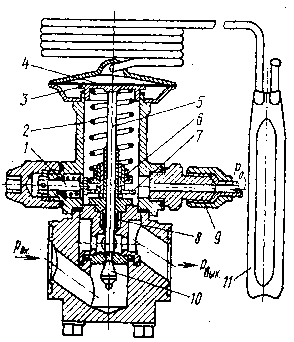
Рис. 6. ТРВ типа ТЕХ-12-20
Сигнализаторы уровня типа FSR. 25. 650 и типа 38Е имеют поплавковую камеру, соединяемую с аппаратом по способу сообщающихся сосудов. В камере перемещается поплавок, к верхней части которого приварен металлический стержень. Изменение положения стержня преобразуется в электрический сигнал с помощью расположенной в верхней части датчика индукционной катушки. Этот сигнал поступает в электронный блок, где при определенном значении преобразуется в замыкание или. размыкание-контактов переключателя. Конструкция электронных блоков позволяет изменять в некоторых пределах значение срабатывания hc и зону возврата Aв. В электронных блоках сигнализаторов уровня типа 38Е сумма значений настройки уровня hc и зоны возврата не должна превышать 40 мм от исходного (нулевого) значения.

Сигнализаторы уровня типов A1 и B1 применяются для контроля уровня некипящих жидкостей.
Перемещение поплавка может быть преобразовано в замыкание-размыкание герметичных магнито-электрических контактов (герконов). Для этого используется магнитный поплавок, размещенный внутри измерительной колонки из диамагнитного материала. Снаружи по высоте колонки размещаются герконы, представляющие собой контакты из ферромагнитного материала, вмонтированные в герметичный стеклянный корпус. При приближении поплавка к геркону под действием магнитных силовых линий происходит замыкание (размыкание) контактов. После удаления магнитного поплавка упругие контакты возвращаются в исходное положение. Благодаря вакууму в корпусе геркона искра не вызывает пригорания контактов. Обычно герконы соединяются с цифровым индикатором. Замыканию каждого геркона соответствует определенная цифра индикатора. На судах такие устройства используются в качестве дискретных указателей уровня хладагента в аппаратах.
Поплавковые регуляторы уровня типа SIII350 и типа SII110 фирмы «Линде» (ФРГ) применяются для регулирования заполнения испарительных систем. В их герметичном корпусе с установочными фланцами и фланцевой крышкой имеется рычаг, с одной стороны которого укреплен поплавок, а с другой— изменяющая живое сечение дроссельного отверстия игла. Для уравновешивания поплавка на рычаге со cтороны регулировочной иглы установлен противовес. При понижении уровня кипящей жидкости в корпусе прибора поплавок опускается, живое сечение дроссельного отверстия и расход жидкости увеличиваются. Повышение уровня жидкости приводит к подъему поплавка, уменьшению живого сечения дроссельного отверстия и расхода жидкости.
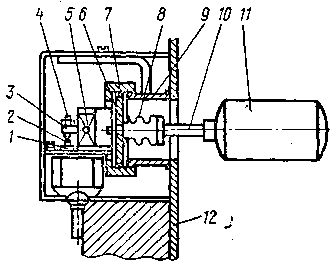
Рис. 7. Поплавковый сигнализатор уровня типа А1
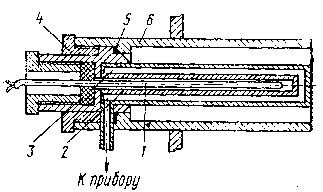
Рис. 8. Термобаллон с нагревательным элементом
Температурные датчики уровня применяются в сигнализаторах уровня типа RT280A. Эти приборы выполнены на базе сигнализаторов разности давлений типа RT260A. Отличие состоит в том, что нижний сильфон воспринимает давление манометрической термосистемы, а верхний посредством уравнительного трубопровода соединяется с паровой зоной аппарата. Изменения уровня жидкости воспринимает горизонтально расположенный термобаллон 2 с электронагревателем 1. Полость 3 термобаллона заполнена адсорбентом. Температура его определяет давление углекислого газа в манометрической термосистеме. Термобаллон 2 устанавливают в гильзе 6 с открытым концом, которая вваривается в сосуд или соединенную, с ним камеру на требуемом уровне. Уплотнение 5 и гайка 4 обеспечивают герметичную установку датчика. Постоянно включенный электронагреватель 1 при напряжении 24 В постоянного или переменного тока имеет мощность 10 Вт. Средняя температура адсорбента при этом зависит от условий охлаждения термобаллона. Пока он соприкасается с парами хладагента, температура адсорбента и давление в манометрической системе сохраняются достаточно высокими. Когда жидкость заходит в гильзу, резко возрастает отвод теплоты от термобаллоиа 2. Температура адсорбента и давление углекислого газа снижаются. Поскольку воспринимаемое верхним сильфоном давление паров хладагента не изменяется, уменьшение воспринимаемого нижним сильфоном давления вызывает переключение контактной системы сигнализатора уровня, После понижения уровня жидкости в сосуде температура адсорбента снова повышается, и контактная система возвращается в исходное состояние.
Температурные регуляторы уровня типа TVV фирмы «Данфосс» выполнены на базе ТРВ с внешним уравниванием давления. Манометрическая термосистема регулятора имеет термобаллон с электронагревателем постоянной мощностью 10/15 Вт. Устанавливают термобаллон в аппарате так же, как и датчик RT280A, ТРВ настроен на перегрев 4°С. Диапазон рабочих температур от 0 до —50°С, а перепад давлений — от 0, 2 до 1, 6 МПа. При увеличении уровня расход рабочей среды через ТРВ уменьшается, и наоборот. Обесточивание термоэлемента приводит к закрытию ТРВ, что важно при аварийных ситуациях.
Емкостные датчики уровня основаны на различии диэлектрической проницаемости жидкости и пара. Основу датчика составляет конденсатор, электрическая емкость которого зависит от контролируемого уровня жидкости. В применяемых на некоторых судах указателях уровня типа «Дебер» используется цилиндрический конденсатор с. коаксиальным расположением электродов. Одним из электродов является вертикальная труба, соединенная с аппаратом. Второй электрод в виде стержня (проволоки) проходит по центру трубы и не имеет электрического. контакта с ней. Для измерения емкости применен мостовой метод, при котором конденсатор включается в одно из плеч индуктивно-емкостного моста. Изменение уровня жидкости и емкости датчика вызывает разбаланс моста. Пропорциональный уровню жидкости сигнал разбаланса после усиления поступает на стрелочный индикатор.
Радиоизотопные сигнализаторы основаны на разном поглощении гамма-лучей жидкостью и паром. Основу их. составляют источник излучения и счетная трубка (сцинтилляционный счетчик), расположеннные с противоположных сторон камеры или аппарата. Повышение уровня жидкости выше места установки счетчика приводит к ослаблению интенсивности воспринимаемого потока гамма-лучей, что и преобразуется в электрический сигнал. Большая проникающая способность гамма-лучей позволяет устанавливать излучатели и счетчики вне аппарата.
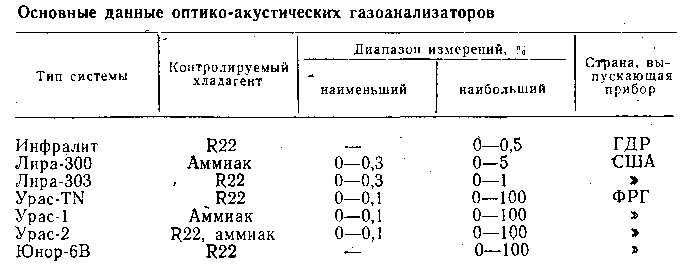
Газоанализаторы систем контроля утечек хладагента
На ряде современных судов производится допусковой контроль концентрации паров хладагента в рефрижераторных отделениях и охлаждаемых помещениях. При появлении паров хладагента в любом из этих помещений срабатывает предупредительная сигнализация. Как правило, система допускового контроля концентрации имеет один газоанализатор. Пробы воздуха из соответствующих точек помещений через определенные, интервалы времени подаются к газоанализатору. Для поочередного отбора и соответствующей подготовки проб предусматриваются трубы, аспиратор, механизм переключения точен, устройство для осушения отбираемых проб и подсистема управления исполнительными органами. Независимо от наличия системы допускового контроля концентрации на некоторых судах применяют переносные течеискатели, предназначенные для обнаружения мест утечки хладагента: Основным элементом их также является газоанализатор.
Для определения концентрации паров хладагента в воздухе пригодны лишь некоторые из большого числа газоанализаторов, классификация которых приводится в ГОСТ 13320—69. Чаще всего на судах применяют газоанализаторы, в которых используют абсорбционный, термокондуктометрический или ионизационный методы преобразования концентрации в выходной сигнал.
В абсорбционных газоанализаторах используют свойства паров и газов избирательно поглощать излучение с определенной длиной волны. Наличие паров хладагента в воздухе лучше всего обнаруживается по изменению степени поглощения прерывистого потока лучистой энергии в инфракрасной области спектра. С учетом типа вторичного преобразователя такие приборы называют оптико-акустическими газоанализаторами инфракрасного поглощения. Их применяют во многих системах контроля концентрации хладагента.
Для примера рассмотрим работу газоанализатора системы «Инфралит». Испускаемые- двумя нагретыми до красного каления излучающими спиралями инфракрасные лучи фокусируются параболическими зеркалами 10 и 11, проходят через измерительную 12 и сравнительную 8 камеры (кюветы) и попадают в приемник-излучения 6. В сравнительной камере заключен азот, не поглощающий инфракрасное излучение. Через кювету 12 прокачивается с постоянным расходом осушенная анализируемая газовая смесь с температурой +50С. Приемник имеет полости 3 и 7, отделенные друг от друга конденсатором 5 с обкладками в виде мембран. Полости 3 и 7 заполнены газом, концентрация которого определяется (парами R22). Нели прокачиваемая через кювету 12 воздушная смесь содержит газ, поглощающий инфракрасные лучи (пары R22), то полость 3 приемника воспринимает излучение меньшей интенсивности, чем полость 7. Вследствие различия интенсивностей падающего излучения нагревание в полости 7 будет больше, чем в полости 3. За счет этого получается разность давлений, вызывающая прогибание мембраны 4 конденсатора 5, что приводит к изменению его электрической емкости. Секторной шайбой (обтюратором) 9 оба луча одновременно прерываются с частотой 6, 25 Гц. С этой же частотой Изменяется емкость конденсатора 5. Периодическое изменение емкости конденсатора преобразуется в переменное напряжение, которое усиливается в усилителе. 2, выпрямляется и выводится на индикатор или сигнализатор 1.
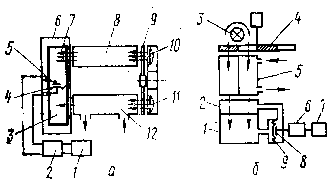
Рис. 9. Принципиальные схемы оптико-акустических газоанализаторов:
а — типа «Инфралит»; б — типа «Юнор 6В»
Некоторые из них имеют один источник излучения и систему зеркал для разделения лучей на два параллельных потока. У газоанализатора системы «Юнор-6В, кроме того, полости приемника излучения располагаются не параллельно, а последовательно. Более короткая полость 2 поглощает излучение средней части спектра, а полость 1—крайних частей спектра. Обтюратор 4 поочередно пропускает излучение источника 3 через измерительную и сравнительную кюветы с одинаковым периодом, но противоположной фазой. Концентрация газа в полостях приемника и их размеры подобраны так, что при прохождении чистого воздуха через кювету 5 пульсация давлений с обеих сторон мембраны 9 близка к нулю даже после полного затемнения одной из кювет.
Если через измерительную кювету 5 проходит воздух с содержанием паров R22, то в ней происходит поглощение центральной части спектра. Поэтом полость 2 воспринимает ослабленное излучение. Температура и давление в ней повышаются меньше. Так как крайние части спектра не поглощаются парами R22, температура, и давление в полости 1 поднимаются допрежних значений. Вследствие этого в каждый полупериод просвечивания измерительной кюветы мембрана 9 изгибается и изменяет емкость конденсатора 8. Пройдя усилитель 6, выходной сигнал конденсатора поступает в индикатор или сигнализатор 7.
Чтобы с помощью оптико-акустических газоанализаторов обнаружить наличие хладагента в воде или рассоле, применяют специальные отстойники. Отстойник выполняется в виде небольшого закрытого сосуда, частично заполненного протекающей жидкостью. Если в ней содержится хладагент, то пары его будут накапливаться в верхней части сосуда. Анализ проб воздуха, отбираемых из отстойника, производится обычным способом.
Принцип действия термокондуктометрических газоанализаторов основан на изменении теплопроводности смеси в зависимости от концентрации определяемого компонента. Данный принцип реализован в отечественных газоанализаторах типа ТП-4201, предназначенных для контроля концентрации паров аммиака в судовых помещениях. Эти приборы работают надежно, но имеют недостаточно высокую чувствительность.
Ионизационный принцип действия реализован в переносных электронных течеискателях типа HL, выпускаемых в ГДР. На судах для обнаружения мест утечки R22 применяют галоидный течеискатель HL-4. Газоанализатор его. имеет два электрода, находящихся, в потоке анализируемого воздуха. Один из них выполнен в виде цилиндра, внутри которого размещается другой электрод. Последний представляет собой намотанную на керамический корпус платиновую нить, которая нагревается до красного каления пропускаемым электрическим током. Между электродами создана разность потенциалов 150 В. В результате происходит термическая ионизация. Ионизационный ток при помощи резистора преобразуется в падение напряжения. Электронная схема усиливает выходной сигнал и выводит его на индикаторный прибор.
Пока между электродами проходит чистый воздух, ионизационный ток имеет небольшую величину и стрелка индикатора стоит на нуле. При появлении паров R22 в проходящем воздухе ионизационный ток резко- возрастает. Увеличение концентрации паров R22 сопровождается дальнейшим увеличением ионизационного тока, однако прибор не предназначен для количественного определения концентрации.
Используемая литература: Ейдвюс А. И. Системы и средства автоматизации судовых
холодильных установок. М.: Легкая и пищевая пром-сть,
Скачать реферат:
Пароль на архив: privetstudent.com